new web: http://bdml.stanford.edu/pmwiki
TWiki > HSR Web>HumanSafeRobot>WhatsNew (24 Apr 2009, MarkCutkosky)
HSR Web>HumanSafeRobot>WhatsNew (24 Apr 2009, MarkCutkosky)
News
MarkCutkosky 24 April 2009: Visited Hughes Research Lab (HRL) in Malibu. They are owned jointly by Boeing and GM and it turns out they have had interaction (a project?) with Charles Wampler & colleagues at GM. They have an amazing location above Malibu Canyon, overlooking the sea.
 At the moment they have a Shadow Robotics arm and hand. The hand has been out for a while. It is mechanically very complex with something like 24 actuation motor/valve pairs pulling cables in the fingers. It runs about about 3.5 bar. The valves are the tiny Lee solenoid values with something like 25msec rise time. The colored paper on the hand is for visual tracking with a stereo camera.
At the moment they have a Shadow Robotics arm and hand. The hand has been out for a while. It is mechanically very complex with something like 24 actuation motor/valve pairs pulling cables in the fingers. It runs about about 3.5 bar. The valves are the tiny Lee solenoid values with something like 25msec rise time. The colored paper on the hand is for visual tracking with a stereo camera.
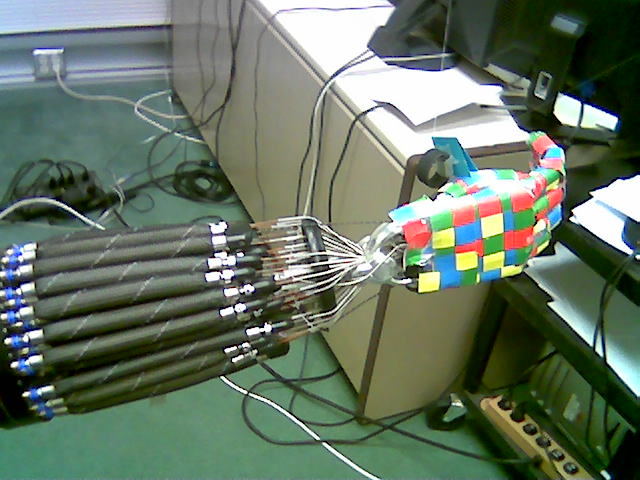
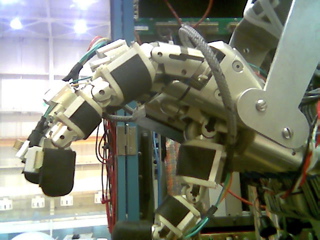
 The arm is new and 1st prototype. It uses much larger air muscles at lower pressure (about 2-3 bar as I understand). So the muscles are quite compliant an response is rather slow. The valves are on-off solenoid valves and the arm is continually sputtering and hissing faintly. The whole system would be difficult to control with any real fidelity in terms of trajectory tracking. It is a good poster child for why Stanford HS robot
macro-mini actuation is needed.
The arm is new and 1st prototype. It uses much larger air muscles at lower pressure (about 2-3 bar as I understand). So the muscles are quite compliant an response is rather slow. The valves are on-off solenoid valves and the arm is continually sputtering and hissing faintly. The whole system would be difficult to control with any real fidelity in terms of trajectory tracking. It is a good poster child for why Stanford HS robot
macro-mini actuation is needed.
MarkCutkosky - 12 Feb 2008: Visited NASA Johnson Space Center (Houston) -- same group that communicated with Khatib and Cutkosky and others about a possible large proposal some years ago. They remain interested in "human safe Robonaut" technologies but (i) robonaut is less popular and funded these days with the emphasis on human exploration of Moon and Mars and (ii) what robotics effort remains is focused on smart rovers (perhaps with arms) to work with astronauts exploring and operating on Moon and Mars. Learned about some interesting tactile sensing technology (Quantum Tunneling Current) as used in Shadow Robotics. (See attached email). Also took a few photos (on cell phone camera so pardon the quality).
- space arm and module testing:

- utah-MIT hand with QTC sensing:
- expensive spider: (about 5 feet long front to back)

Ideas, requests, problems regarding TWiki? Send feedback