Tags: SummerBlogs, Profiles.DontrellStephens
Dontrell Stephens Summer 2025
''Week Five - July 20 - July 25 '
This week I:
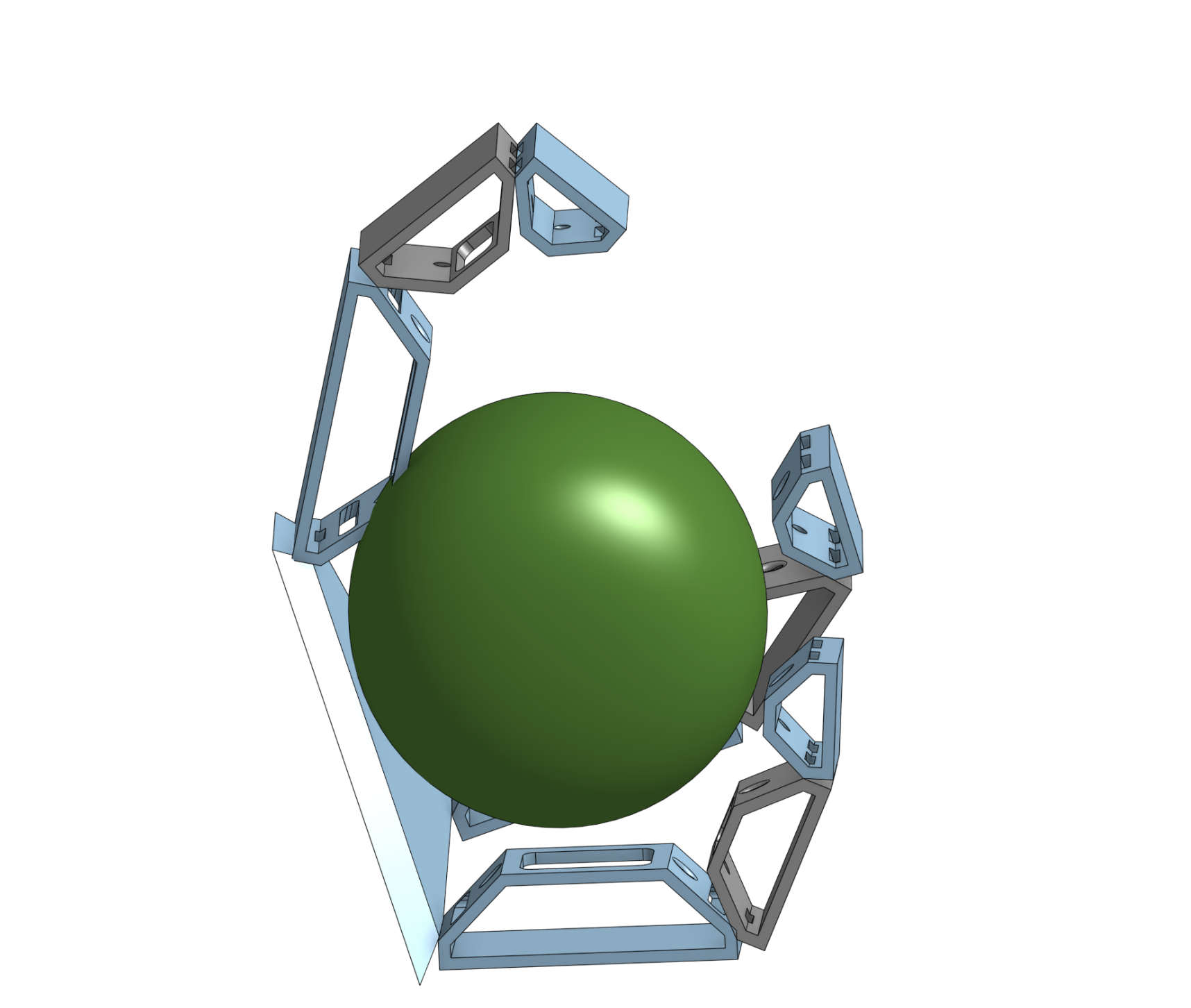
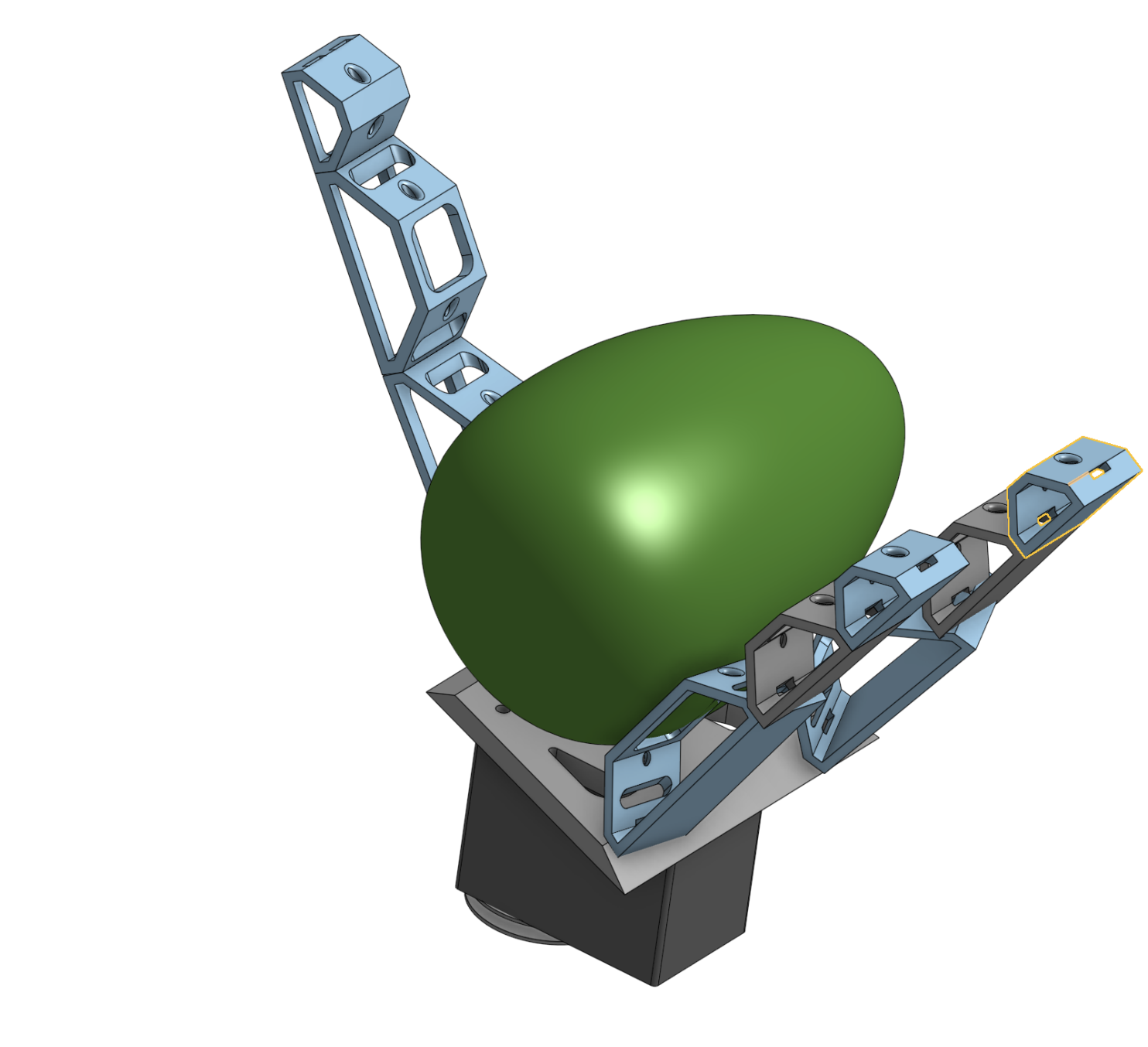
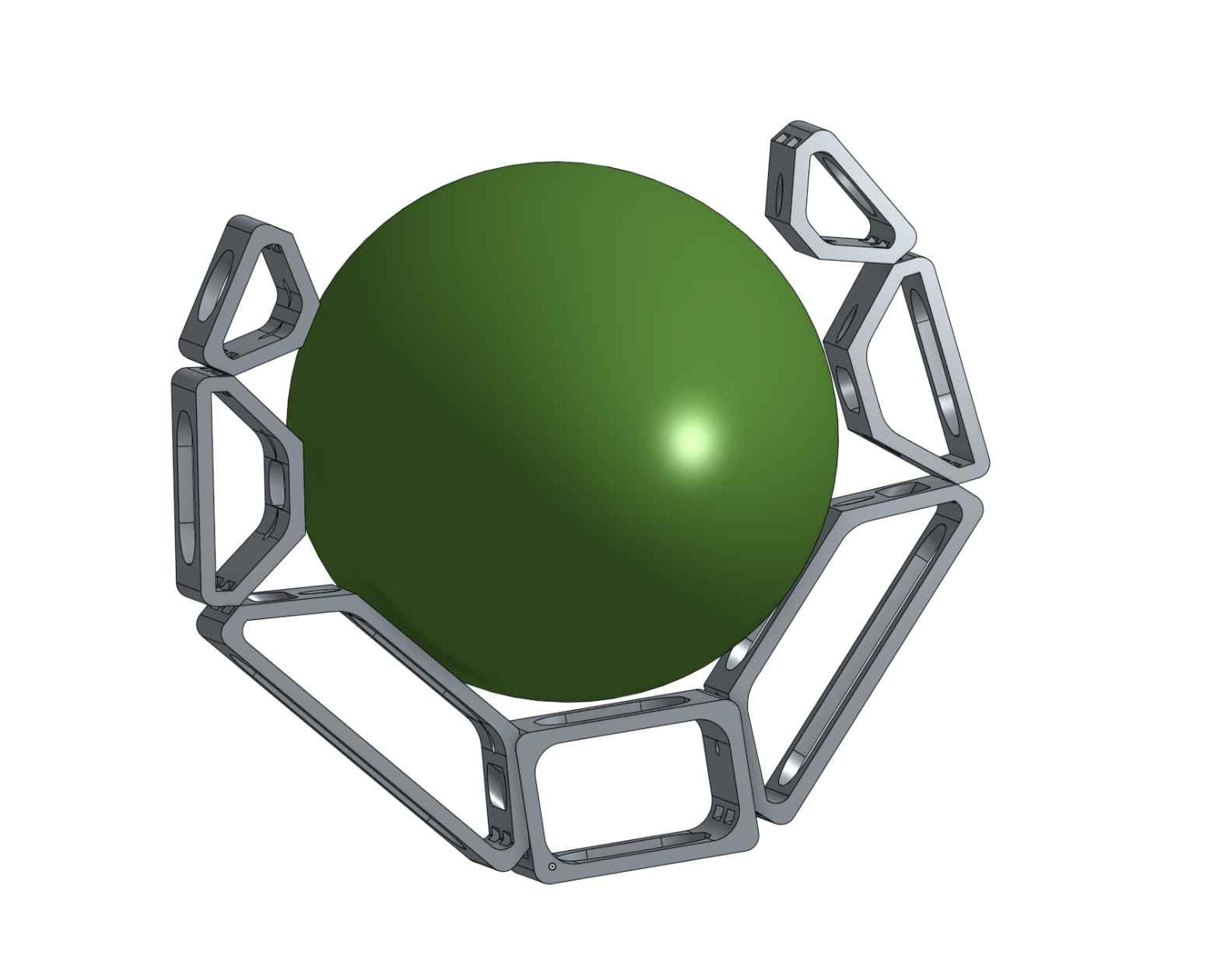
- Finalized the finger design for my avocado gripper.

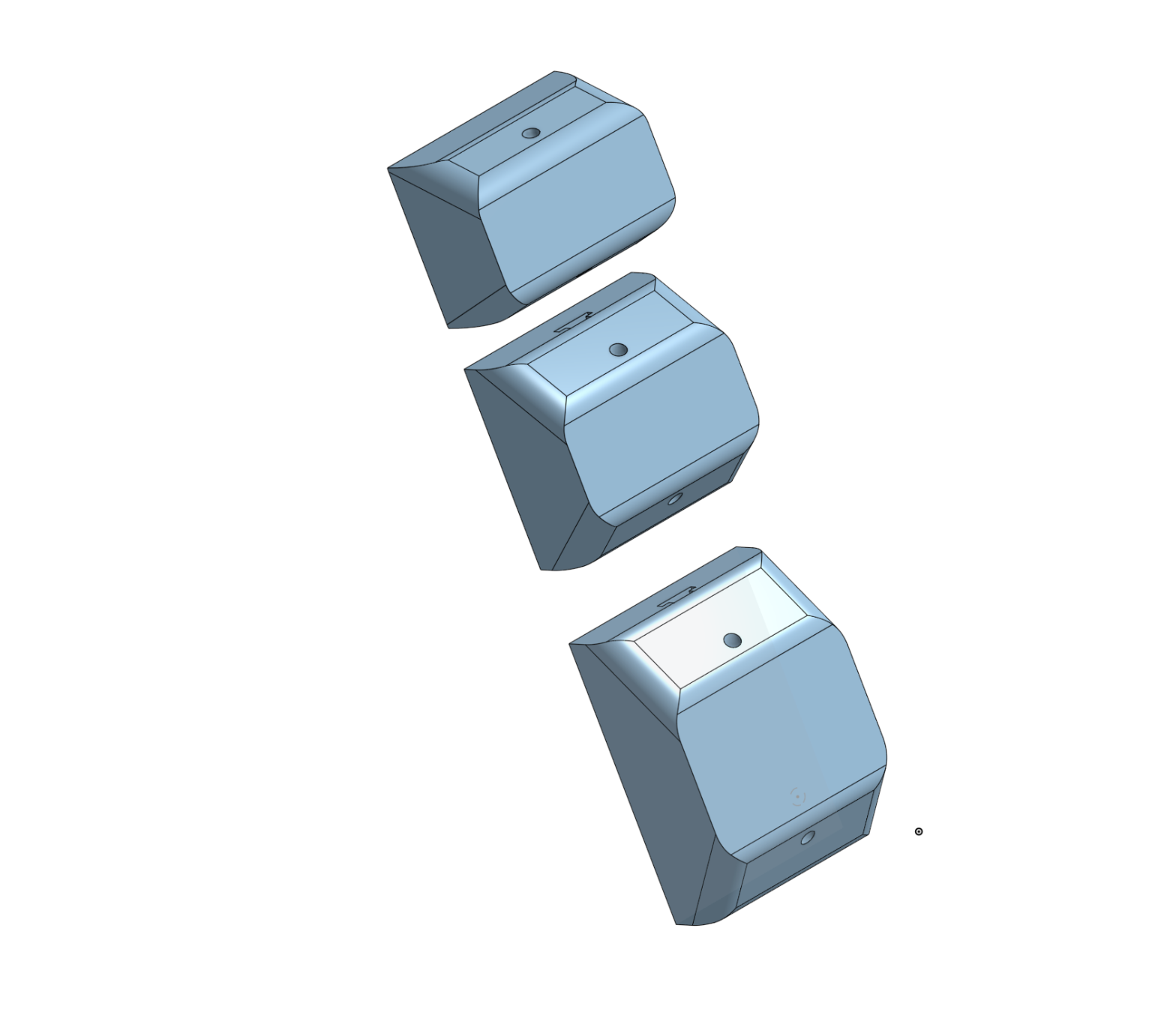
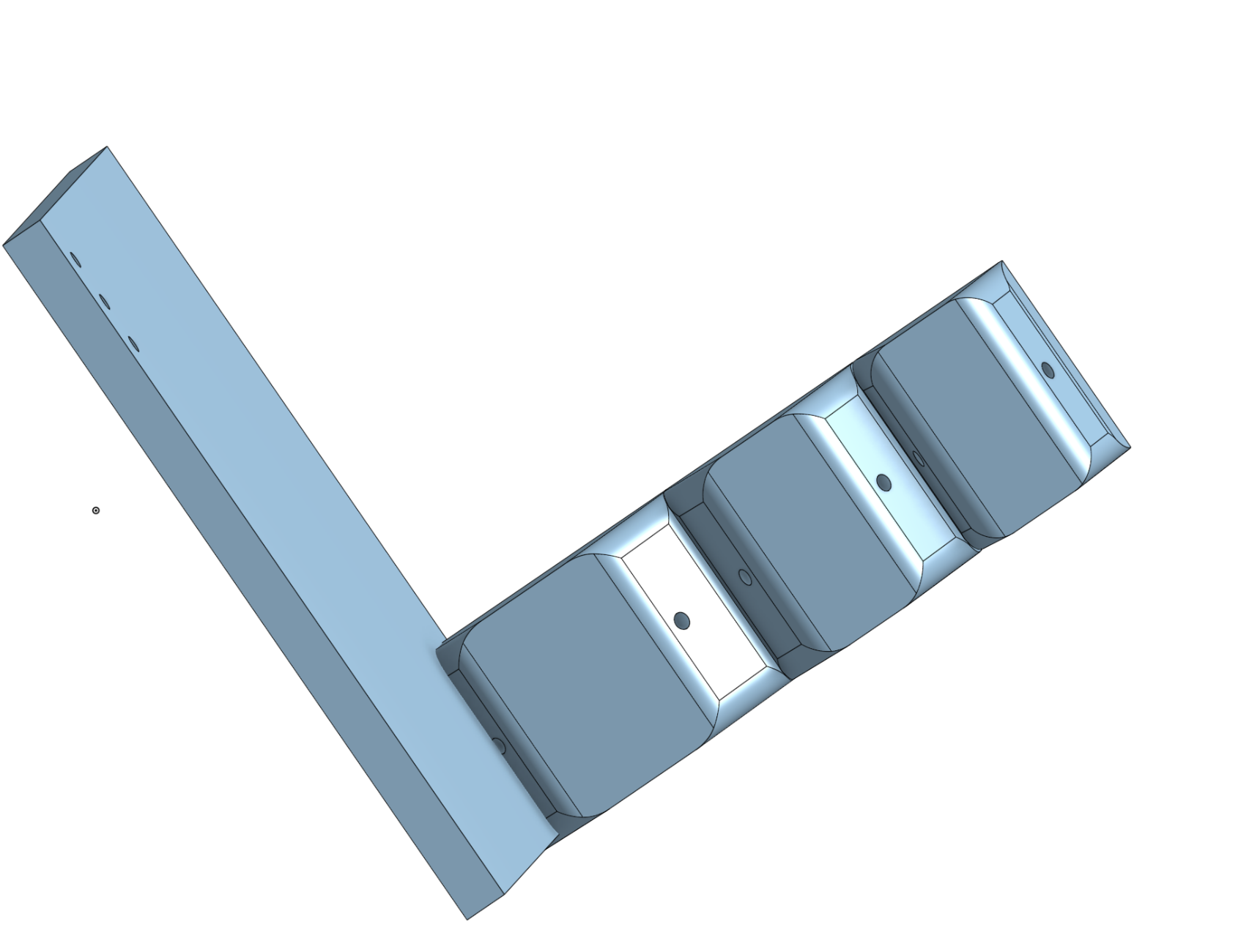
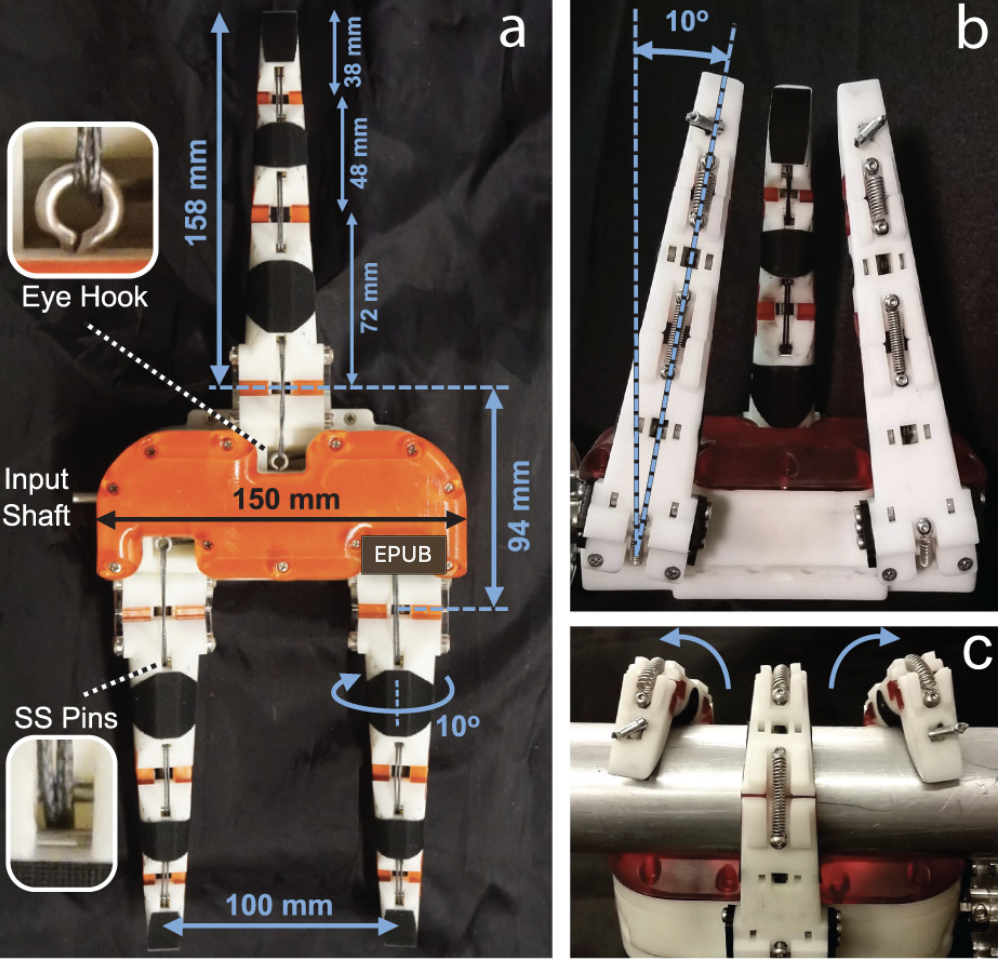
- This is a sample two-fingered tendon based system. I used it to model the fingers that I had created to see how their overall dimensions looked, weight, size, fragility, and grip strength. I found that the finger overall worked well with a few design improvements:
- 1. Instead of having two tiptoes going throughout the fingers as in gripper with black parts, I opted for a single zip tie to be routed from the base to halfway in the middle phalanges. and then the middle phlange has a one-to-two zip tie converter.
- 2. I increased the distance of the joint between the base and proximal phalange.
- 3. I slightly modified the dimensions of the gripper with white parts. The changes included changing the shell distance slightly, and size of extruded holes.
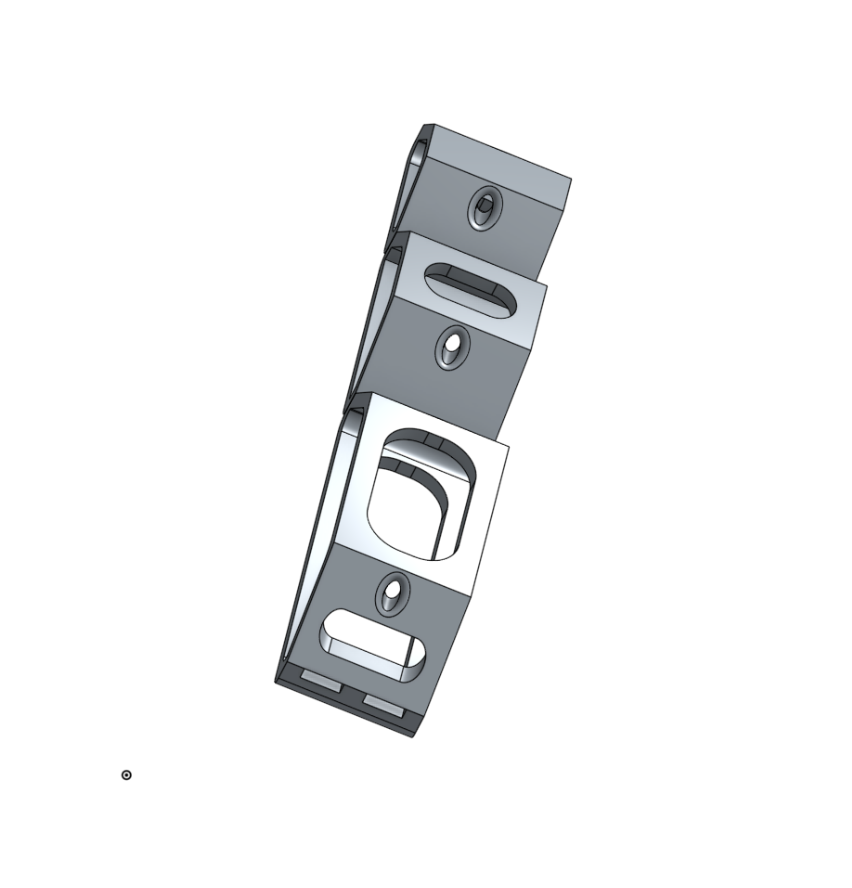
- Currently, next steps involve adding a high friction material to the fingers and modeling the base of the fingers in Onshape.
This is what I currently have as base designs.
''Week four - July 14 - July 19 '
This week I:
- I started CADing out the sketches that I drew.
- However, I was struggling a lot in the process, so I asked Stanley to help me out a little bit in the process.
- I learned that with CADING, you should not just hop in without a solid idea of what your design should be. If you do just jump in, you will spend countless hours just struggling with no real progress being made.
- However, I was struggling a lot in the process, so I asked Stanley to help me out a little bit in the process.
- Investigated ways to make the fingers as light weight as possible, currently the design is to have a shelled figure, and to include zipties inside of the figure instead of a silicone casting for hinges/joints
- looked into FinRay designs.
- I was exploring gin different design choices (ex angled beams, less beams, more beams), can affect teh amount of grip and compliance you have you the FinRay.
''Week Three - July 7- July 11 '
This week I:

- Brainstormed ideas with Stanley and Venny for research projects, and potential designs.
- Finalized my research project:
- I decided to purse robotics in the agricultural field by designing an end effector to harvest avocados ( Avocado trees are normally 20 - ft tall)
- Reviewed Literature on soft robotics grippers specifically tendon based grippers.
- This is the finger design I chose for the avocado gripper. I selected it because of its ability to conform to the shape of the avocado, allowing it to grasp the fruit securely without causing bruising
- Literature reviewed:
- Made preliminary sketches for the avocado end effector:
- I opted for a two-finger, tendon-based design (both fingers will be controlled by the same tendon), with a camera positioned above them and a pair of scissors mounted on top. The concept is that when an avocado is identified, the system approaches it from one of the sides. The fingers�made of silicone rubber for both grip and conformity�then grasp the avocado. Inside the fingers, pressure plates will detect contact; once activated, they will trigger the scissors to move forward slightly and snip the stem of the avocado.
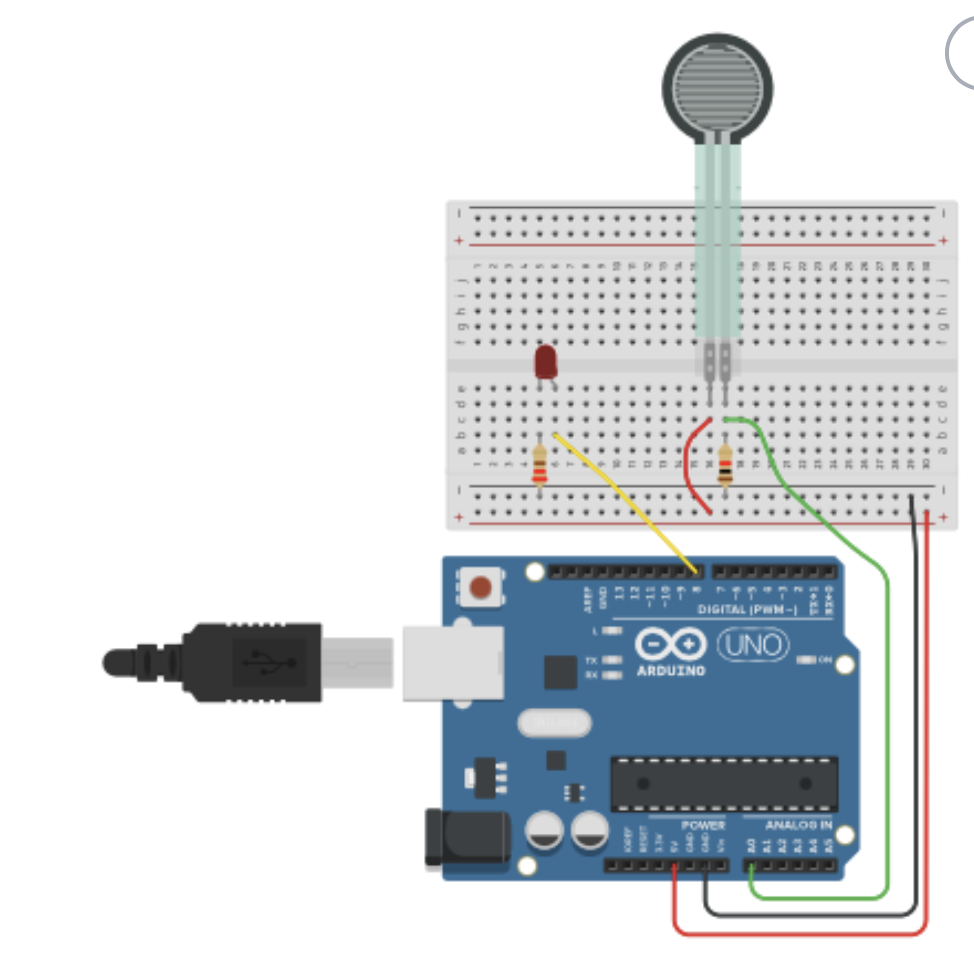
- Attended the second Arduino workshop hosted by Mark.
- I learned how to recursively update the mean in code, and also assembled a pressured sensor- based circuit.
- Reached out to farmers in California:
- I reached out to farmers in California by email and phone, asking about the methods they currently use and the challenges they face in harvesting avocados. I only received a response from one farmer, but I learned that it�s important to keep the stem attached to the avocado; otherwise, it will begin to rot more quickly.
- Made preliminary cad designs for the avocado gripper
- Currently, I am designing the CAD model for the finger and the base/palm of the gripper. I initially struggled with implementing the finger, but I now have a working design. I will continue to improve it and complete the CAD for the rest of the end effector.
- Assisted in lab cleanup
Week Two - June 30- July 4
This week I:
- Attended an Arudino workshop hosted by Mark, and learned how to create non-blocking code
- Aided in data collection for ReachBot, collecting information about the correlation between measured length and the Encoder Wheel ticks
- Worked in a group to code a ReachBot End effector to pick up a bottle, and move it to a different position
- We performed this task by having each of the effectors joints set to its center position, and then we inputted different values until we were able to reach specific milestones
- Narrowed down potential research topics to Argicultural end effectors and braced Manipulation
- Aided in data collection for the tree perching drone by taking pictures of various trees around campus
- Learned about forward kinematics, inverse kinematics, and the Jacobian Matrix
- Learned how to program Dynamixel Actuators, and create linear regression lines in python
- Reviewed Literature and discussed how worked:
- I chose the Ocean One hand, and have linked a google doc with my summary below: https://docs.google.com/document/d/1TFQxP45_0eFDv-VxbaoTBhKyqKH0Gy6tWAAk6Z1p270/edit?usp=sharing
-
Week One - June 23-27
This week I:
- got access to the BDML Slack; https://stanford.enterprise.slack.com/archives/C092NMTJYUA
- got access to the BDML Google Drive; https://drive.google.com/drive/folders/0ANXCcJfl2DSXUk9PVA
- designed tetrahelix in OnShape, however I went through the wrong process of deleting the frame so, I could not use fasteners to connect each individual triangle and instead used rotations
- Learned about Dynamixel XL430-W250-T Actuators and how to control them using DYNMIXEL WIZARD


- Assembled a ReachBot end effector
- In the process, I learned the importance of making sure designs have easy accessibility when it comes inserting fasteners
- Reviewed Literature and discussed on various end effectors for harvesting Fruits, specifically for the Kiwi fruit: https://www.sciencedirect.com/science/article/pii/S153751101830638X
- Attended the 2025 BDML Summer Kickoff! I had a great time meeting people in the lab, going hiking for the first time, and grilling!
- Completed online and BDML lab specific safety trainings
- Attained access to PRL
- Learned about various projects at BDML, and discussed potential research directions
Page last modified on July 25, 2025, at 11:25 am