 ,
, 
29 May 2026: Nice article from Hertz Foundation on Hertz Fellow Soy Choi
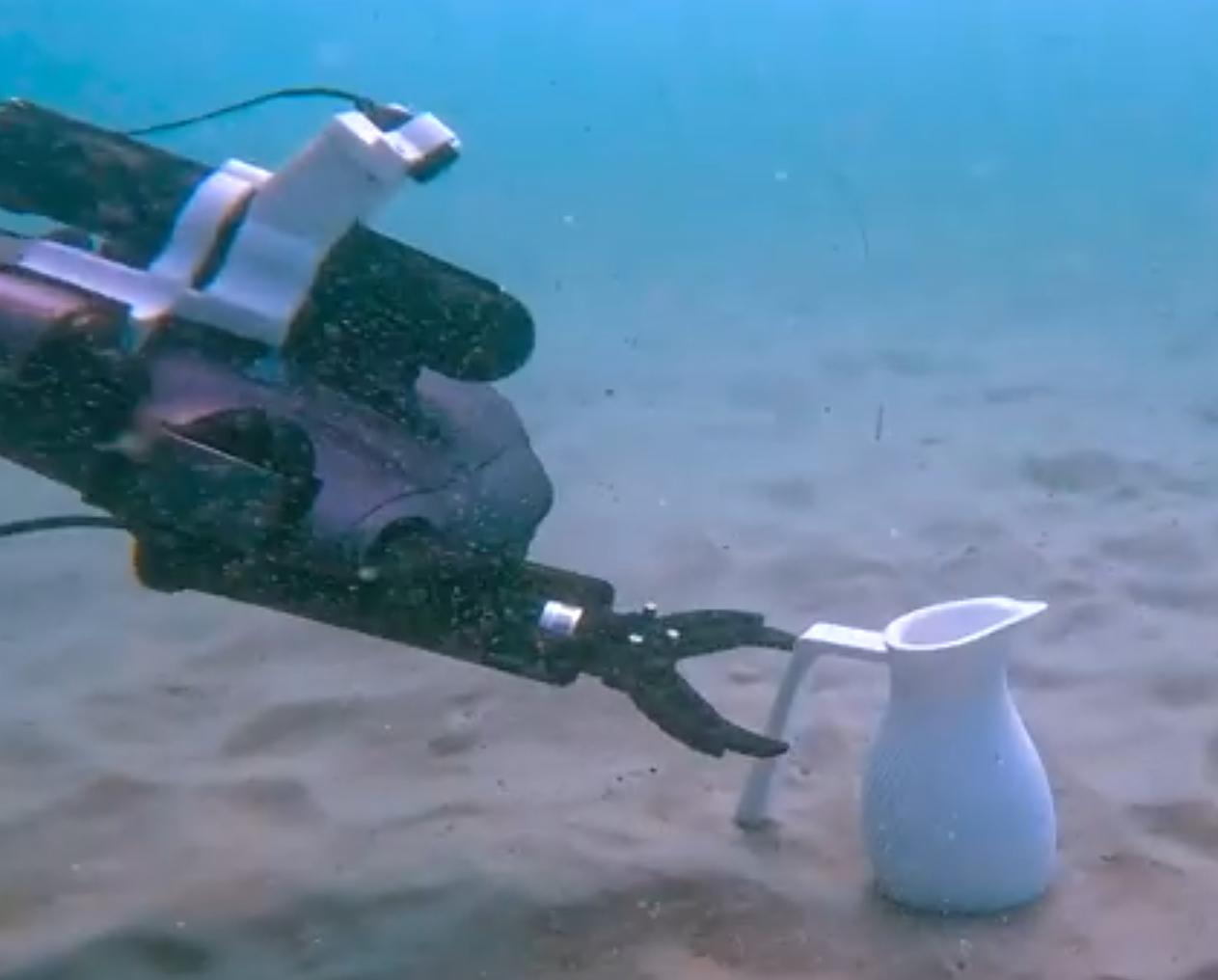
11 March 2026: The UMI-Diving project, in collaboration with the laboratory of Prof. Shuran Song, will be presented at RSS 2026. See the Website and Teaser Video from UMI-Aquatic's Grand Day Out in Monterey, CA. Many thanks to the staff at Hopkins Marine Station!

4 Dec2025: Congratulations to Stanley, Venny, et al. on their Best Paper award at the International Space Robotics Conference (iSpaRo) 2025 for: "Long-Reach Robotic Manipulation for Assembly and Outfitting of Lunar Structures".

BDML Reunion 2025 in front of MERL
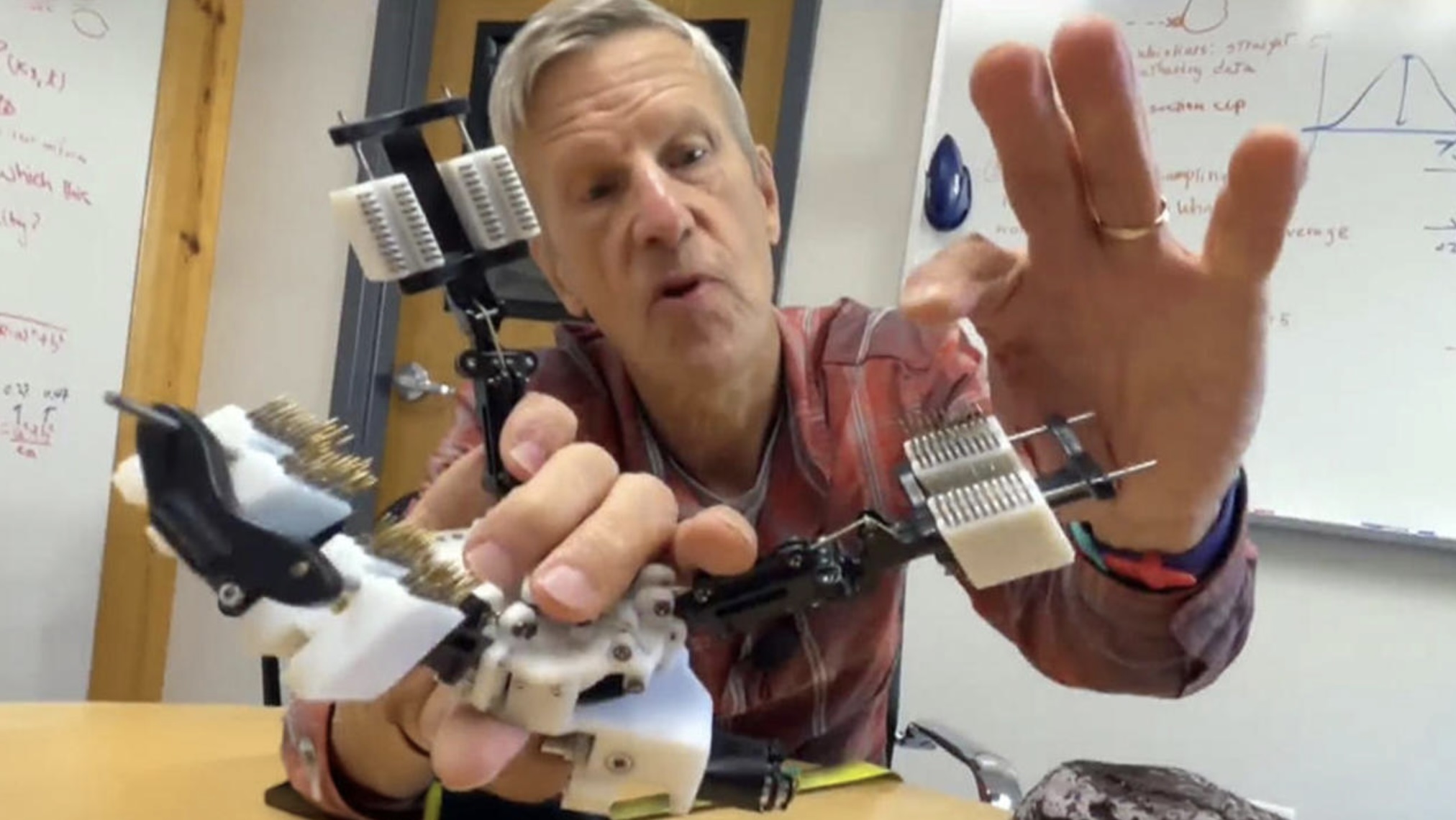
27 Sept: We love Mark! Dozens of DML and BDML alumni gathered this weekend to celebrate Mark and his impact on robotics and on our lives.
19 Sept: Short ASME news story on AmarHajjAhmad's article, which grew out of her PhD.
7 August: BDML does the Trinity Alps. See BDMLEndOfSummer for links to many more photos & details.
The gecko tells 'em how it is
27 June: Once again it's great to host Da Vinci Camp at BDML.
26 June: SummerKickoff at Portola Redwoods State Park

Tiptoe Falls at Portola Redwoods
23 June: Welcome to the new 2025 Summer students: Kayla Magruder (SURF); Kyla Archie and Mireya Velasquez (STAR); Dontrell Stephens and Diego Reyes (SSFP); Chris Guo (SURI); Ziyang Chang (Stanford/Beijing program).
Congratulations to DaneBrouwer (June 5 ) on his PhD defense
Congratulations to Crystal Winston (Nov 13 ) and JuliaDi (Nov 20) on their PhD defenses!
8.2.24: ReachBot on CBS News

22August: BDML braved the snowy Sierras on our 2024 backpacking trip!
9August: Congrats to Hojung Choi for his successful PhD defense!
14July: A small hiking trip with several members of the lab! See Summer Hikes Excursions for recommended local hikes.
3July: Congrats to Seongheon Hong for receiving the Kwanjeong Educational Foundation Fellowship!
27June: Welcome 2024 SURIs: Xitlali Cruz, Saad Khan, Abigail DeLory, and SURFs: Jazm�n Renteria Gonzalez, Grace Archibeck!

14June: Congrats to Rachel Thomasson for her successful PhD defense!
16May: Professor Mark Cutkosky is honored with a Pioneer in Robotics and Automation Award "For contributions to Robot Design: from Bioinspiration to Biounderstanding" with many lab alumni coming to celebrate. See BDML at ICRA 2024 for a debrief on lab presentations and updates.
10May: Congrats to Ali Kight for her successful PhD defense!
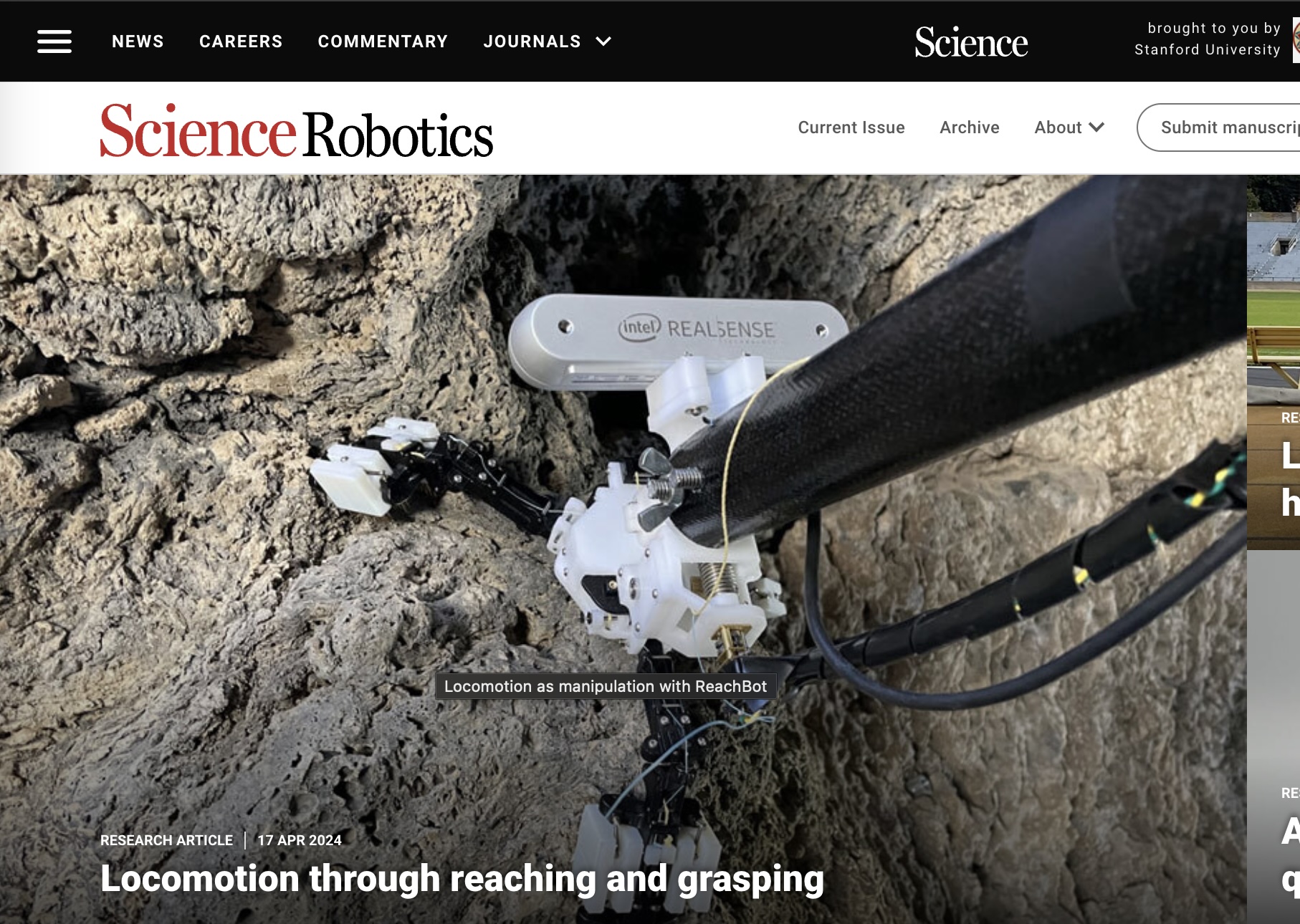
17April: The Science Robotics ReachBot paper is out, with a summary in Scientific American (See ReachBot for updates.)
4Nov: A power brunch in SF of current BDML women and local alumnae!

(Santhi Analytis (2014); Allison Okamura (2000); Alice Wu (2017); Rachel Thomasson; Amar Hajj-Ahmad (2023); Hannah Stuart (2017); Xinyi Liang; Julia Di; Crystal Winston)
2Nov: Congrats to ASL (and honorary BDML) alumna Stephanie Newdick on her PhD defense on motion planning for ReachBot. Thanks also to Stephanie for the splendid animation that is now on the ReachBot page.
7Sept at 9:00am PDT Special Zoom panel session with alumni for incoming graduate students interested in core design-related project courses
16July: Congrats to TonyChen for "#2 best poster/short-paper" for TadBot at LivingMachines2023 in Genoa.

Kicking off Summer 2023 at Portola Redwoods. (Link to posters)
22June:_Welcome 2023 SURIs: Joshua James Citron, Joseph Garcia, Luis Sarabia, Jonah Bhisitkul, Carrington Grant, Mariam Colborn, Nolan Topper -- and SURF: Eduardo Salazar
19 June 2023: Congratulations to TonyChen and MichaelLin on their PhD defenses!

1 June 2023: Congratulations to Amar Hajj-Ahmad and alumna Amy Kyungwon Han for their IEEE RA-L best paper award. Congratulations also to Tony Chen et al. for their IEEE RAM best paper award!
22 May 2023: Congratulations to Amar Hajj-Ahmad on her PhD defense!
7 March 2023: Congratulations to CDR/BDML Admin. Gosia Wojciechowska on winning the School of Engineering 2023 staff award for client services.

31Jan 2023: Flexiv Robotics has released a gripper with the BDML gecko-inspired adhesive technology. Congratulations to alumni and Flexiv co-founders ShiquanWang and HaoJiang, (and to AmarHajjAhmad for helping them get started). You can see it in a video (the gecko gripper bit starts at about 25:00)
23 Jan 2023: A very nice video has come out from Veritasium on gecko-inspired adhesives. Congratulations to Veritasium on the very clear explanations!
16Dec2022: Congratulations to SamFrishman et al. for receiving the Best Paper Award from IEEE Transactions on Medical Robotics and Bionics (T-MRB) for their paper on Extending Reach Inside the MRI Bore: A 7-DOF, Low-Friction, Hydrostatic Teleoperator which was published in August.
15Nov2022: RIPThanos

30Oct2022: Congratulations to TonyChen et al. for their Best Paper Award on Robot Mechanisms and Design at IEEE IROS 2022 and to RachelThomasson et al. for being a Best Paper Finalist, and to HojungChoi et al. for their Best Poster Presentation at the IROS workshop on Large Scale Robot Skin: Perception, Interaction, and Control. Finally, congratulations to KennethH et al. for winning the best paper and presentation at the IROS workshop on Agile Robotics: Perception, Planning and Control.
23Sept2022: Congratulations to IleanaPirozzi on her PhD Defense: Advanced Heart Failure Technologies leveraging Biomimetic Design.
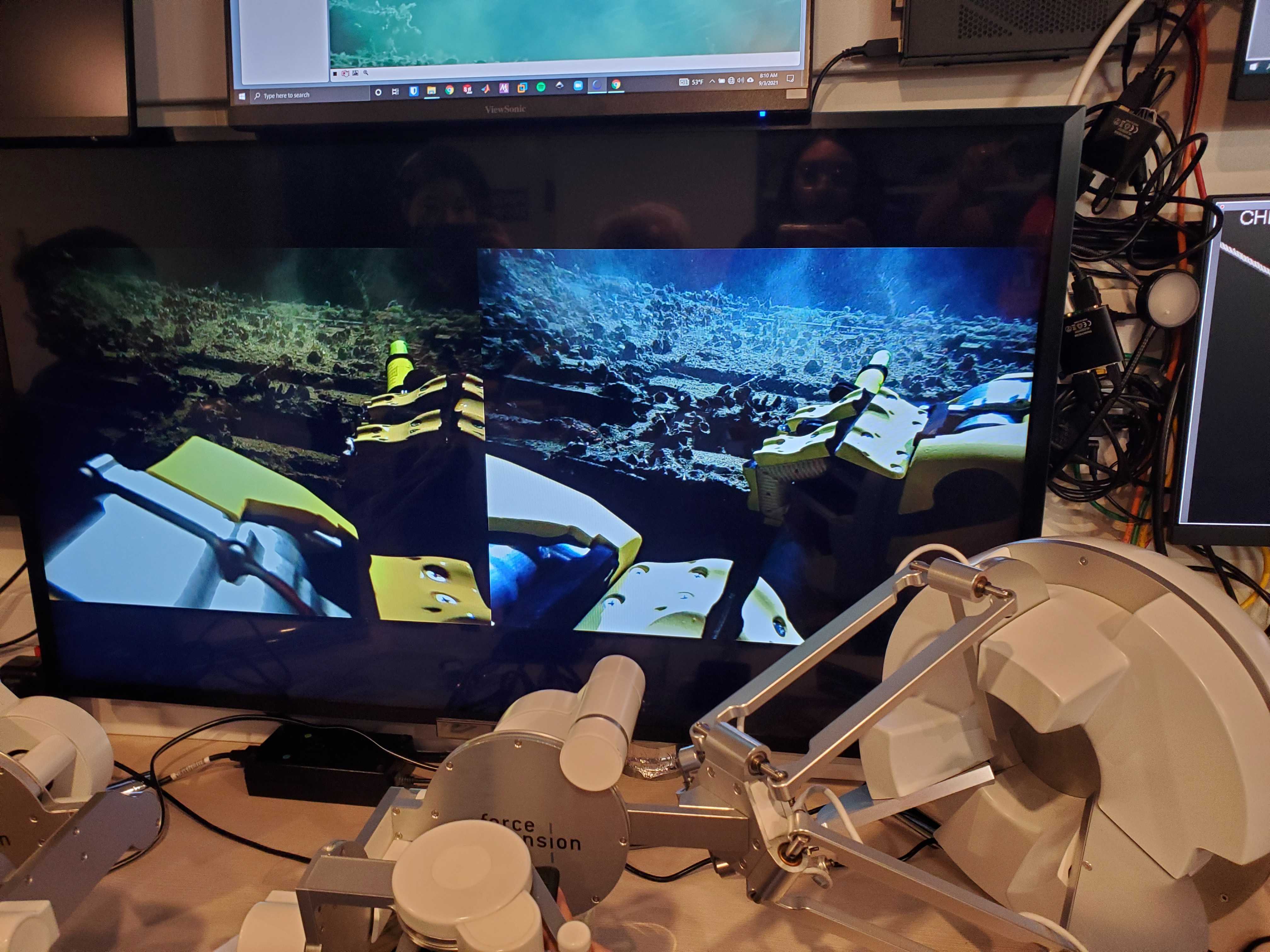
29Aug2022: Wired Magazine has nice YouTube feature on OceanOneK, which was written up earlier this summer in Stanford News. Rachel's hands feature prominently at about 1:19.

22July2022: Once again we were delighted to meet with the da Vinci Summer Camp. We hope it might be in person next time.
20June2022: Welcome to 2022 SURI and SURF researchers: Thomas Mansfield, Heather Nolte, Dominic Sangster, Olivia Schroeder, Nathan Tan, Guadalupe Bernal.
1June2022: Congrats to Crystal and Tony for their respective Best Abstract/Presentation awards at ICRA workshops on Leveraging Advancements in Smart Materials Science and New Frontiers of Parallel Robotics.
15Dec2021: Congrats to alumnus WilsonRuotolo and to DaneBrouwer on their Science Robotics article on farmHand. Some nice press as well: Stanford News, Popular Science, Yahoo, Tech Crunch...
 |
1Dec2021: Congrats to alumnus Will Roderick on his Perching Bird Robot article and press: (Stanford News, Science news, and others) |
9Sept2021: RachelThomasson reports that the Ocean1K hands are working well off the coast of La Ciotat.
Aboard the boat!

SURIs Allison & Becky at Barney Lake
4Aug2021: BDML Backpacking Trip to Hoover Wilderness
25June2021: BDMLRetreat2021
18June2021: First summer 2021 BDML lab meeting - RoloDex, ReachBot and early summer planning.
1June2021: Congratulations to WilsonRuotolo on his PhD defense: Design Principles for Manipulation with Astrictive Contact

Emilio Reyes explains RoloDex
31May2021: Congratulations to AmyHan and AmarHajjAhmad on their Best Poster presentation award at the IEEE ICRA Workshop on Emerging paradigms for robotic manipulation: from the lab to the productive world
20May2021: Nice article and short video in the Stanford News on the gecko gripper in the ISS.

9April2021: Stanford alumna Kate Rubins
unpacks the gecko gripper in the ISS
April2021: new ReachBot and TRI2.0 Household Robot projects starting.
24Feb2021: Congratulations: to SamFrishman on his PhD defense.
11Jan2021: Welcome to start of winter quarter! Still mostly online... See BdmlCalendar for the main lab meeting schedule. Additional small-group meetings also being set up.
6Jan2021: Congratulations: to AlexGruebele on his PhD defense.
1Oct2020: Nice to see design sessions on the whiteboard again!
25Sept2020: Congratulations: to Capella Kerst on her PhD defense.
9Sept2020: Welcome to the start of AY 2020-21. See Cutkosky Advising for office hours and advising. Also check out the various Robotics seminars and events.
18Aug2020: Congratulations: to Amy Han on her PhD defense.
3Jun2020: We're back! (sort of, and in a careful Phase-2 Covid protocol way). Stay tuned!
26May2020 : Congratulations: to Will Roderick and Tae Myung Huh on their (via Zoom) PhD defenses.
- 21May2020: Congratulations: Although we are all sheltering in place, we congratulate Sam, Ali, and Ileana on winning the best presentation award at the (online) ASME Design of Medical Devices Conference for their paper on a variable compliance annuloplasty ring.
- 10Jan2020: Welcome to visiting professor Mark Yim!

Lassen Peak, with Mt. Shasta in the distance
19-21Sept -- Fire and Ice: BDML does Mt Lassen Volcanic National Park

CRS18 Liftoff
24July: A brief clearing over Cape Canaveral and we have liftoff! The gecko-gripper for Astrobee is on its way to the ISS.
- 29Sept: The stuff is aboard the ISS. Looks like it will be tested in January 2020
- 27July: CRS-18 Dragon capsule arrives at ISS
17July: Nice Stanford News writeup on Rob Alexander's activities in BDML.
20June: Welcome to the summer students and visitors: SURIs Joel Herrera, Andrew Zerbe, Simone Wilcox. Also SURF student MelaCoffey, K12 teacher Rob Alexander and visiting PhD student and ROS expert Jean-Philippe Roberge.
22May: Congratulations to Amy Han (and alumni Elliot Hawkes, Dave Christensen and Hao Jiang) for receiving the 2019 IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award for Grasping Without Squeezing: Design and Modeling of Shear-Activated Grippers
May2019: The Gecko Gripper for Astrobee has completed its approval processes and been released to NASA for launching to the International Space Station (ISS). Tony Chen and Arul Suresh invite you to stay tuned for updates!
Jan-March2019: Congratulations to recent PhD graduates Chris Ploch, Natalie Burkhard and Matt Estrada.

5th grade team, Frenchtown MT
24Jan2019: We have new rotation students in the lab and a bunch of new papers out (see Publications). Meanwhile, NASA has proposed space-related projects for FIRST Lego League STEM teams, which has resulted in some fun Skype calls to teams interested in grasping objects in space with gecko grippers.

Wilson entertains da Vinci camp
24Oct: Matt Estrada's FlyCroTugs in the news, to accompany the AAAS Science Robotics article, in collaboration with EPFL.
- Stanford News, IEEE Spectrum
- Science Magazine, AAAS Eureka alert
- MIT Technology Review
- Wired, Discover
14 Aug: Glad to welcome back the DaVinci Camp students back for a tour of the lab. Thank you to Wilson explaining the finer points of spiny hands.

SummerKickoff 2018 at Portola Redwoods
27 June: Start the summer with new students and projects: sensor-based perching, perching Astrobees inside the ISS with gecko adhesives, soft hands for large climbing robots, high-performance passive master-slave manipulators and new sensor skins.
2 April: ME21 Renaissance Machine Design is being offered again for Spring 2018. It is NOT limited to freshmen. It is a WAY-CE course open to anybody who wants to build cool machines and learn about the artist/engineers that conceived them. Details: http://me21.stanford.edu

Space junk & black gecko-grippers in the Quad
31 Oct: Happy Halloween! - Space Junk is a serious problem, even on Stanford Campus :-) Fortunately, we have plenty of gecko-grippers to round it up.
1 August: BDML and Stanford hosted Living Machines 2017 July 25-28. Lots of great talks, workshops, events
- LivingMachines2017Photos from the dinner cruise, etc.
- Conference Proceedings published by Springer Lecture Notes in AI
1July: summer kickoff at Butano State Park. Gallery of planning posters




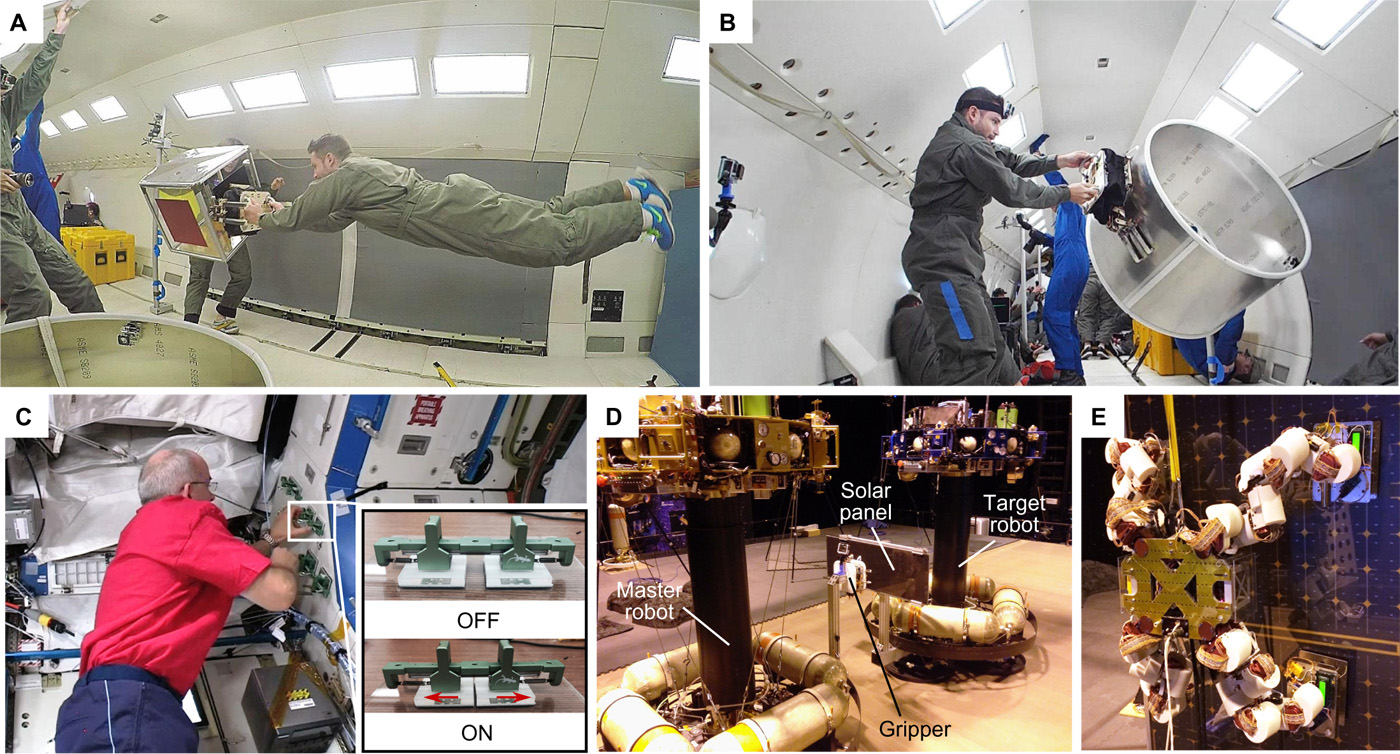
Figure from the Science Robotics gripper paper
28June: The Science Robotics space gripper paper by Hao Jiang et al. is live. There have been some media articles as well:
- Stanford News article and nice video with Elliot and Hao
- Short video from AAAS Science
- Wired: space gripper
- The Verge
- Science News
- New Scientist
- PBS NOVA
14June: Shiquan Wang's PhD defense on "Traversing Highly-varied Terrain: Enhanced Contacts for Human-scale Robot Locomotion," will be presented and streamed live at 2pm, June 14. Details: ShiquanDefenseStreaming
13June: Hannah Stuart's PhD defense on "Robotic Hand Design for Remote Ocean Exploration: Active Selection of Compliance and Contact Conditions," at 12:00 in Thornton Annex.
9June: Congratulations to AmyHan, JungHwaBae and ChrisPloch for being selected as best student presentation and poster finalists at IEEE World Haptics 2017.
30May: Congratulations to NatalieBurkhard, SamFrishman, et al. for being selected as a Best Medical Robotics Paper finalist at ICRA 2017.
26May: Hao Jiang's defense on "Surface Grasping with Bio-inspired, Opposed Adhesion," in Bldg. 520/131

13Oct: Congratulations to Shiquan Wang and Hao Jiang for their IROS paper which won the award for Best Paper: safety, security and rescue robotics, in memory of Motohiro Kisoi. There is also a nice writeup in IEEE Spectrum on the work, which is part of the MultiLimbedClimbing project.
3Oct: The vertical inchworm climber demonstrates that gecko adhesives like the new edition of the Springer Handbook of Robotics.

6Sept: UR5 Arrives!
Just what every lab needs.
| 5 Aug 2016: Congratulations to Morgan Pope (and Mark) for the Best Presentation award at Living Machines 2016 |  |
29 July 2016: MERL Summer BBQ hosted by BDML with our official BBQ branding logo.


7 July: Lab meeting moved to 10:30 for summer to avoid conflicts with MERL BBQ

25 June 2016: Offsite retreat at Portola Redwoods State Park.
- Summer2016PlanningPosters (what we planned to do by end of summer and by end of 1st week of August)
20 June 2016: Welcome to the new summer students: Vanessa Ibarra, Aaron Sabin, Chris Kimes, Bessie Noll, Tyler Packard and visitors Ryo Okumura and Michele Lanzetta
10 June 2016: Gecko stuff at Bio-X open house

6 June 2016: Nice mention of Stickybot as part of NSF Special Report on Robotics Foundations
12 May 2016: Hao Jiang's perching quadrotor video featured in IEEE Spectrum robotics, with a story by Morgan Pope.

{kind=link}
{kind=link}
27 April 2016: Congratulations to Hannah Stuart and Shiquan Wang and all the participants from Oussama Khatib's robotics lab in CS on their maiden voyage for Ocean One. Video: https://www.youtube.com/watch?v=p1HmgP9l4VY
26 April 2016: Congratulations to Morgan Pope on his defense. Go SCAMP!
8 April 2016: Congratulations to Will and Arul on their respective NSF and NASA fellowships.
29 March 2016: NASA sent a gecko gripper to the International Space Station - from BDML alumnus and collaborator Aaron Parness, at JPL.
14 March 2016: Congratulations to Elliot, Eric and Dave for winning the ASME Smart Materials Best Bio-inspired Paper award for a paper published in any journal in the previous 12 months. The award is for "Human climbing with efficiently scaled gecko-inspired dry adhesives" (the same RS Interface paper that got involved in No Spiderman? news below).
13 March 2016: David's Ant-Inspired Microtugs in the New York Times
11Feb2016: Mike North (former collaborator) paid a visit and made a video of what he found: Grippy, Not Sticky

Mark demonstrating grasping without squeezing
No Spiderman? - A recent article in PNAS on the scaling of adhesives for insects and geckos suggests that if we extrapolate to humans, climbing is not feasible. This idea was picked up in the press, with articles like Science: No, you can't be Spider-Man (Engadget). Stephen Colbert built on it for a splendid riff on his show: Science Has Ruined Spider-Man. But wait... didn't we show that it is entirely possible to climb walls with gecko-inspired adhesives if you distribute the forces very carefully (RS Interface Nov2014)? So Elliot Hawkes has prepared a rebuttal, (28Jan2016), which Colbert picked up for the kickoff to his 5 Feb. show: S-s-spi-i-i-i-der-ma-a-a-an.
28 Oct 2015: Mark, Elliot, and Dave present work on grasping without squeezing, human climbing, and microrobots at Swissnex Biorobots: Dissected'
12 Oct 2015: Come to Dave Christensen's defense tomorrow morning!
1 Oct 2015: Congratulations to Alice Wu, Arul, Hao, John, Elliot & Dave for the IROS 2015 Best Paper Award for their paper on "Tactile Sensing for Gecko-Inspired Adhesion." BDML attendees reported a lively conference, with 969 papers (of 2134 submitted) and many good workshops, etc.
30 Sept: Lab Meeting time will move to 12:30 starting this Friday.
05August2015: Always glad to have the DaVinci Camp stop by!



ICRA Best Student Paper 2015
26June2015: BDML kick-off-the-summer retreat
22June2015: Welcome to the new SURIs for summer 2015: KatieHahm, IsabelGueble, IanLewis, ChrisKimes,ChristinaGibbs
18June2015: Nice story in IEEE Spectrum on the evolution of spiny grippers: Spinybot -->RiSE-->JPL-->NASA (nothing about the branch of the family tree that went to Zman however ;-)
30May2015: Congratulations to Elliot, Dave, Amy and Hao on winning the 2015 IEEE ICRA Best Student Paper award for "Grasping without Squeezing: Shear Adhesion Gripper with Fibrillar Thin Film."
27May2015: BDML and Bioinspiration at the Royal Society celebration of 350 years of scientific publishing
- paper: Climbing with Adhesion, from Bio-Inspiration to Bio-Understanding, Royal Society Interface Focus, May 2015
15May2015: NYT -- controllable adhesion applications: perching, tugging, gripping.
27April2015: MicroTugs get some press as ICRA2015 approaches:
- "Tiny robots climb walls carrying..." (New Scientist)
- "Tiny robots carry up to 2,000..." (BBC News)
- "Tiny robots...", NBC News
- More links on the MicroTugs page
13March2015: Getting ready for TED in Vancouver: 1500 geckos with directional, controllable adhesive
- BDML Twitter: https://mobile.twitter.com/bdmlstanford?p=i

 (
(
 |
21Nov2014: Popular press has picked up on the paper led by Elliot on Human climbing with efficiently scaled gecko-inspired dry adhesives
|
26Sept2014: Schedules for the Stanford Robotics Seminar, BDML lab meetings, etc. are taking shape: LabMeetingSchedule
22Sept2014: Back from Crown Lake expedition and ready to start the new year!

25July2014: The DaVinci Camp Summer Institute stopped by this morning to learn about bio-inspired robots and play with some gecko-inspired adhesives.

27June2014: Lab meeting at Sam McDonald Park to kick off the summer among the flora and fauna.



8June2014: An Enjoyable and successful ICRA2014 in Hong Kong! And congratulations to Matt Estrada for being a best paper finalist. (See Publications page for the several ICRA papers.)

19 Sept:''' Welcome to new and returning students