Category: BioinspiredRobots
Hands for Mobile Marine Manipulation
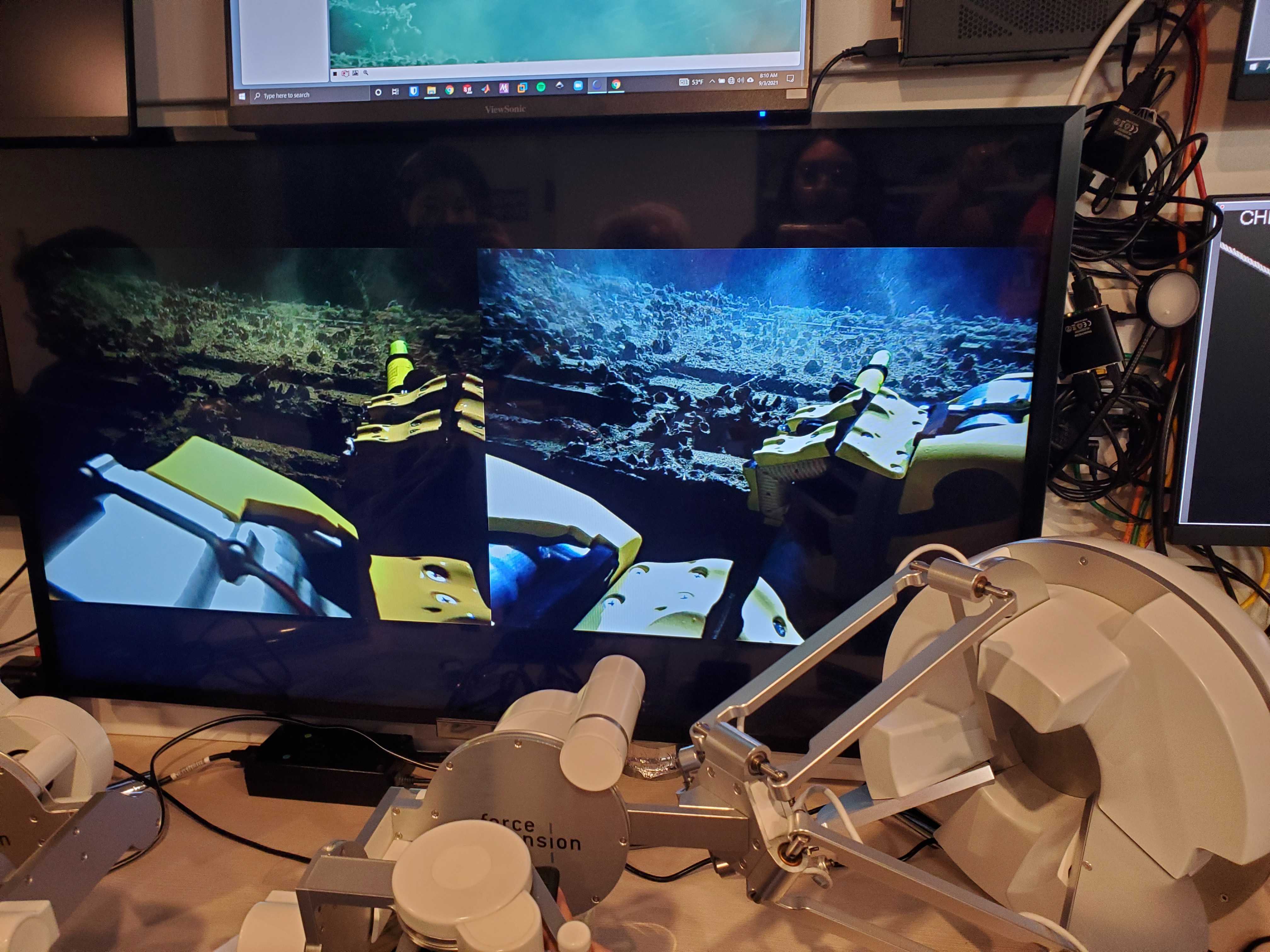
9 Sept 2021: After many COVID-related delays, Ocean1K, the successor to OceanOne is diving off the coast of La Ciotat in France. As its name suggests, it should be capable to 1000m. The robot has new hands, designed by RachelThomasson and WilsonRuotolo. More updates as the results of the first dives become available.
Introduction
The performance of highly underactuated hands is highly dependent upon the compliance in the system and friction. We design for, and actively control, both by designing mechanisms that either selectively change stiffness or change contact conditions. Specifically for undersea tasks, we developed the kinematic design of the Ocean One humanoid's hands [1,2], and have explored the addition of gentle suction flow to the fingertips as a way to influence contact location and friction [3,4].
Dynamic simulation is an especially powerful tool in the evaluation of highly underactuated hands because friction is a dominant factor in performance. It also allows for the investigation of grasping with complex geometry in 3D, with inertial effects. SimGrasp was developed in parallel with the Ocean One hand project. It is built upon Klamp't (Hauser) and intended specifically for iterating efficiently through different hand design parameters.
Compliance in the Ocean One Hands
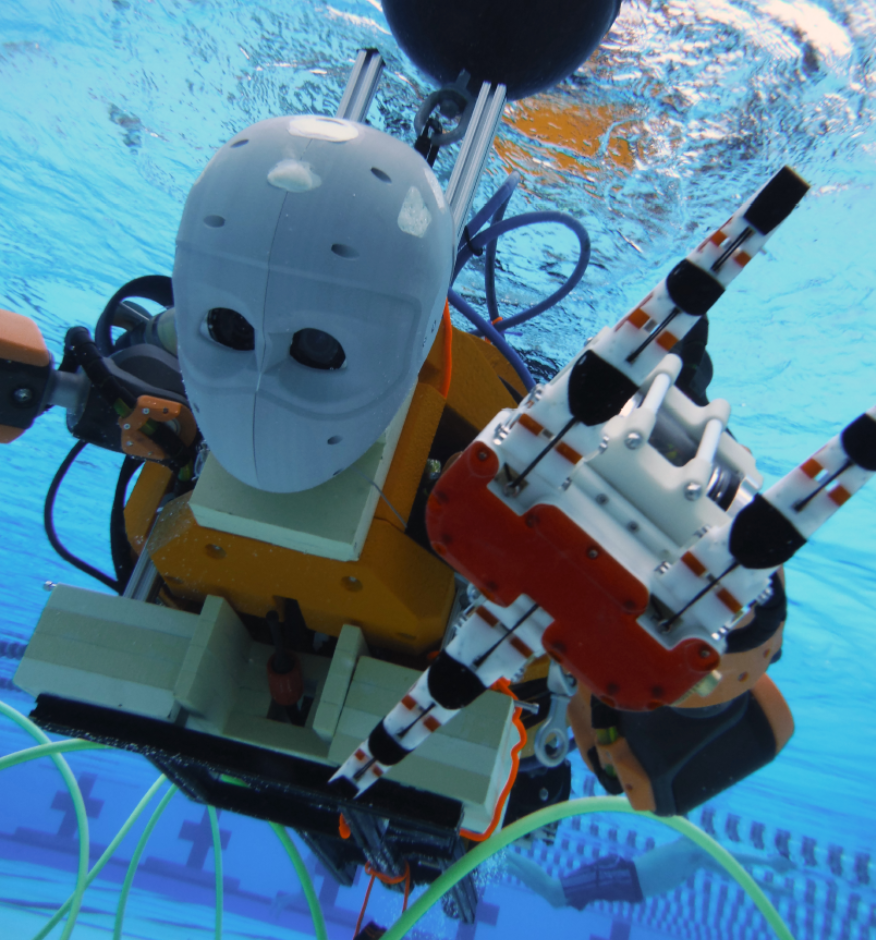
Early grasping tests in the pool.
Hands designed for Ocean One have been tested in the field, at La Lune shipwreck off the coast of Toulon, France. This ship sunk in 1664 and is relatively well preserved, but it is hard to access at 91 meters depth. Here are two video releases about the robot and mission:
Ocean One Press Release Video: 27April2016
The La Lune Mission (in French) Video: 28April2016
The initial motivation for the entire underwater bimanual manipulation project was generated through the Red Sea Exploratorium, a collaboration between KAUST, Meka Robotics, and Stanford CS and ME departments.
We built compliant underactuated robotic hands for humanoid diving tasks, from exploring coral to investigating archaeological sights. The robot is intended not only to replace humans in dangerous diving tasks, but also to provide easy access to previously unexplored delicate environments. The hands therefore need to be capable of both strength grasping tasks (for handling tools and structures) as well as gentle precision tasks (for extracting delicate samples or artifacts).
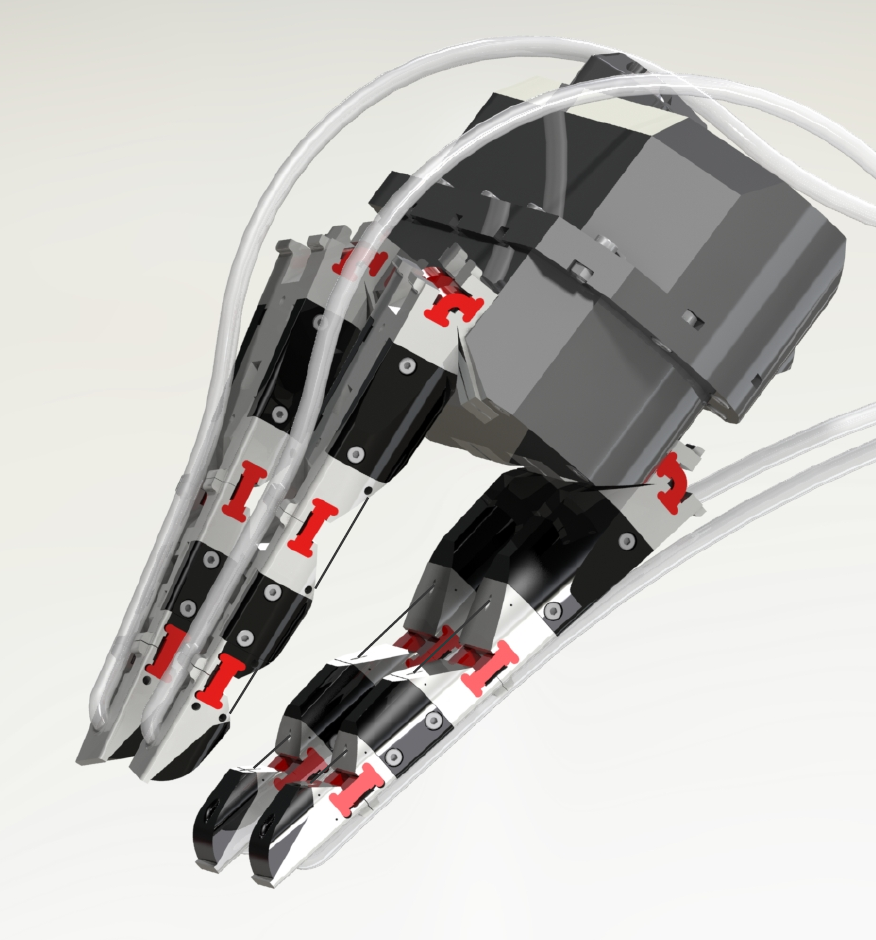
Multiple design iterations have been developed to satisfy these task requirements, from a 4-finger design with one motor per finger that can use gaiting to achieve different grasp types, to a 3-finger design that uses a single actuator. The latter design was deployed in the field for superior robustness; it uses springs in series with the tendons to protect them during unintentional shock. These springs also share loads between the disparate fingers in the hand.
 | 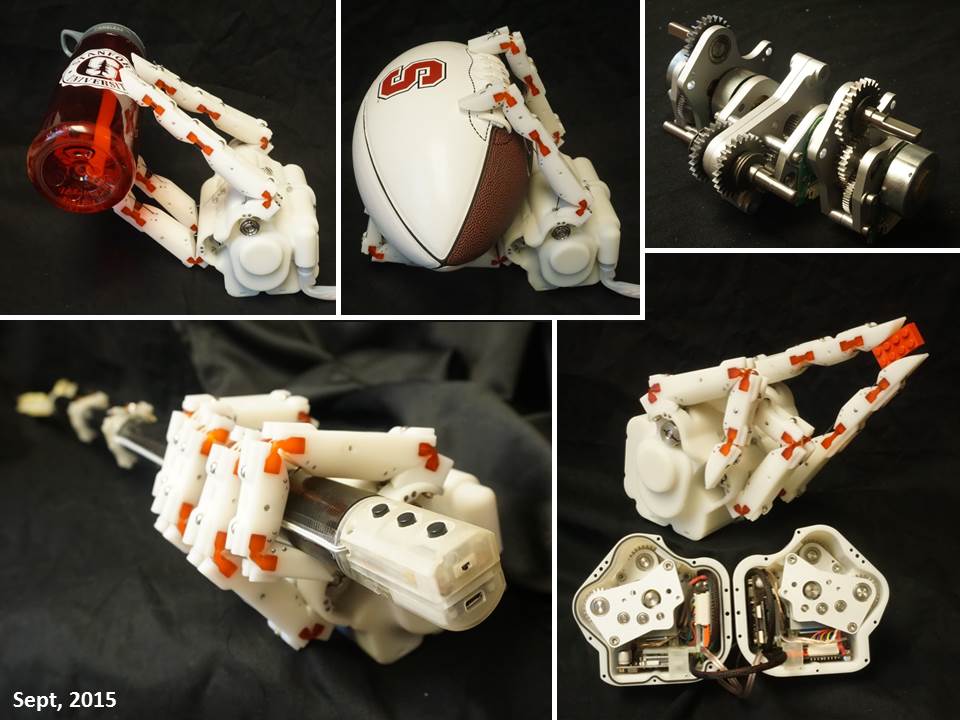 |
| A hand with a single actuator achieves multiple grasp types, relying on the compliance of the fingers and transmission. | A 4-finger, 4 motor hand design can achieve various grasp types through finger gaiting. |
These are the first compliant, underactuated, tendon-driven hands designed specifically for subsea environments. Degressive spring mechanisms at the finger joints allow the hand to perform straight-finger pinching, without sacrificing the power grasp strength [2,3].
Controlling Contact Conditions with Gentle Suction Flow
Light suction flow can increase the acquisition region for light objects [3], as well as improve the retention of slippery sample which is most important in pinching tasks through an increase in the static coefficient of friction [4]. Sensing suction flow using a pressure transducer to estimate flow rate is a way to detect tactile events and the engagement of suction on a surface [4].
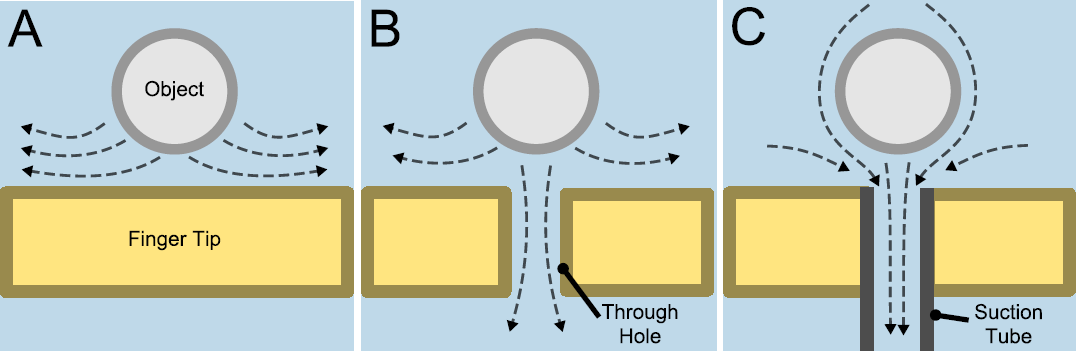 |
| (A) The object is not acquired becuase local flow around the fingertip pushes the object away. Although a fingertip with holes will decrease this effect (B), only attractive flow will counteract this negative phenomenon (C). |
In order to evaluate grasping performance of the hand underwater more accurately, the dynamics of fluid and the hand need to be considered. We have used both SimGrasp and the dynamic engine Moby with the python interface developed as described in this article. In one of our simulations, we investigated the benefits of adding gentle suction at different locations on the fingers by including a simplified suction model into the simulator. This video demonstrates one possible way in which light suction flow can improve grasp success: https://www.youtube.com/watch?v=qzwbfYv1GqA. This is ongoing work.
 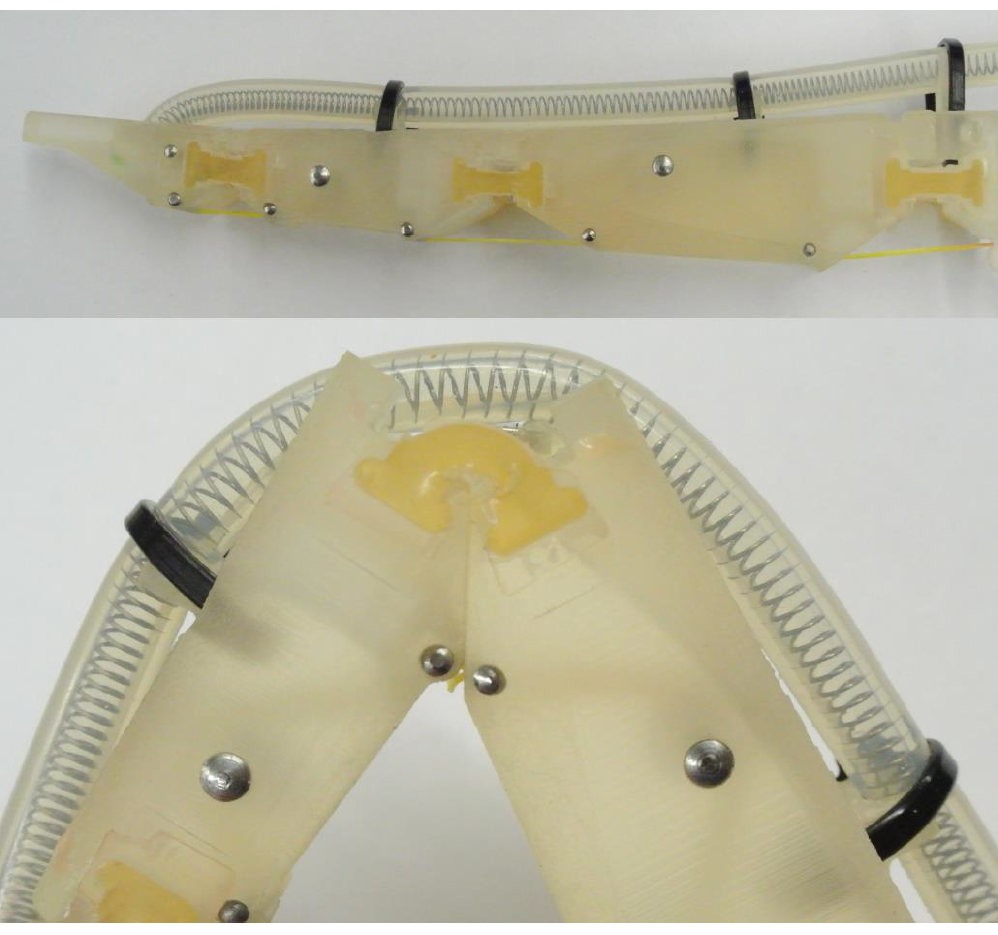 |
| Suction tubes can double as passive spring elements in the hand [4]. The analysis conducted so far is for suction at the fingertips, future work will look into how suction at different locations could also help in manipulation tasks. |
[3] Khatib, O., Yeh, X., Brantner, G., Soe, B., Kim, B., Ganguly, S., Stuart, H., Wang, S., Cutkosky, M., Edsinger, A., Mullins, P., Barham, M., Voolstra, C., Salama, K., L’Hour, M., Creuze, V. (2016). “Ocean One: A Robotic Avatar for Oceanic Discovery.” Robotics & Automation Magazine. Link
[2] Stuart, H., Wang, S., Khatib, O., Cutkosky, M. (2017). The Ocean One hands: An adaptive design for robust marine manipulation. The International Journal of Robotics Research.''(Prepublished)
[3] Stuart, H.S., Wang, S., Gardineer, B., Christensen, D.L., Aukes, D. and Cutkosky, M.R., "A Compliant Underactuated Hand with Suction Flow for Underwater Mobile Manipulation," IEEE/ICRA 2014 (preprint).
[4] Stuart, H.S, Bagheri, M., Wang, S., Barnard, H., Sheng, A.L., Jenkins, M., Cutkosky, M.R. "Suction Helps in a Pinch: Improving Underwater Manipulation with Gentle Suction Flow," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015. (preprint Δ)