 |
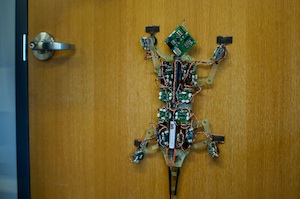
Adhesion and Applications: Grasping and climbing vertical surfaces with gecko-inspired controllable, directional dry adhesives. Research includes the continued development of StickybotIII, new adhesives and manufacturing methods, and new applications such as perching UAVs and grasping space junk. |
 |
Mobile Manipulation: Selectively compliant, under-actuated hands with tactile sensing. Research includes underwater hand and grasp analysis and development of artificial skins with pressure, shear and dynamic tactile sensors. Multi-limbed climbing also involves grasping surfaces and manipulating the robot's own body. |
Page last modified on March 29, 2016, at 11:40 AM