You are invited to ShiquanWang’s PhD defense either in person or via YouTube streaming
- Title: Traversing Highly-varied Terrain: Enhanced Contacts for Human-scale Robot Locomotion
- Location: Building 520, Room 131
- Time: Wednesday, June 14th, 2017 2:00-3:00 pm PDT
- Streaming details: Go to the BDML YouTube channel.
- Click on the Live Stream video title Shiquan Defense. There will be a live stream icon indicating that the stream is up and running.
- The slides are posted here: Attach:ShiquanPDFSlides.pdf
Abstract
As robots move into applications in difficult terrain, a particular challenge is to interact stably with rough, rocky surfaces. Possible applications range from planetary exploration to search and rescue operations in the aftermath of an earthquake or other disasters. In such applications, human-scale robots equipped with legs and arms can have advantages over wheels or treads, allowing them to negotiate rough piles of debris and even cliffs and masonry walls. To do so, they need to balance and achieve traction on rocky surfaces and even to grasp them, to brace themselves and to climb.
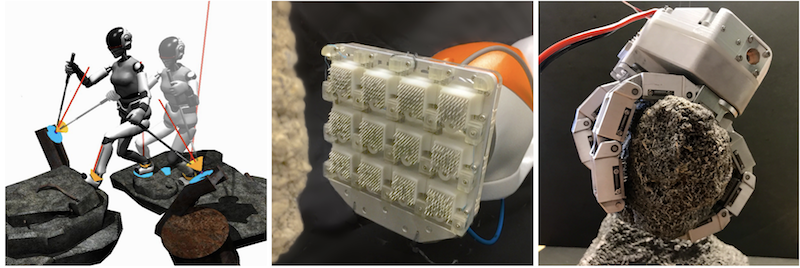
This talk focuses on the physical interaction of robot appendages with hard, rough surfaces and presents two particular climbing aids inspired by human hiking and rock climbing activities. The first is a smart hiking staff for humanoid robots. It allows additional contacts to be applied outside the normal reach of the hands and feet flexibly. The staff also contains a sensing system to determine ground reaction forces, contact orientation and the onset of sliding. The second climbing aid introduced is an array of spines to improve contact quality. By softly conforming to rough surfaces, each spine exploits microscopic surface features. Load sharing systems ensure that the contributions of many individual spines combine together, so that the hand or foot of a human-sized robot can exert forces on the order of hundreds of Newtons parallel to the surface for climbing. These spines can also be integrated into multi-fingered hands that wrap around convex features, allowing the robot to apply tensile forces perpendicular to the surface.