On this page... (hide)
- 1. Vision for Force Sensing Needle
- 2. Design
- 3. Videos
- 4. What�s New
- 5. Links
- 6. Publications
1. Vision for Force Sensing Needle
During the insertion and manipulation of minimally invasive tools, a physician�s ability to accurately feel forces on the tool is compromised as it transverses tissues of varying properties. It is valuable to know, for example, when specific membranes are punctured, or if there is a fatty deposit occluding the tool�s trajectory. These informations are important to make decisions for driving needle and perform a needle intervention. So we aims to provide interventional surgeons with the haptic cues for forces at the tip of a biopsy needle.
2. Design
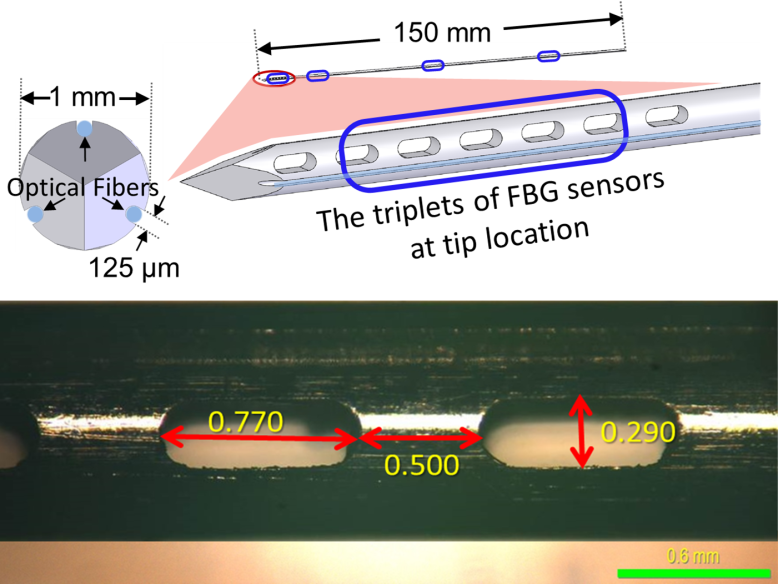
The function of this needle is similar to the MRI-compatible 3D shape sensing needle. Fiber Bragg gratings (FBG) sensors are used for strain sensing along the needle. Enhanced features and FBG sensors at the tip of the needle allow for resolution of contact loads at the needle tip. Deformations due to the axial loading were smaller than the deform caused by radial forces so we modified the needle tip design (adding multiple oval shape holes) to improve axial sensitivity. FEA result shows that ratio between axial and radial sensitivity before the modification the was 1:30 but after it became 1:4.
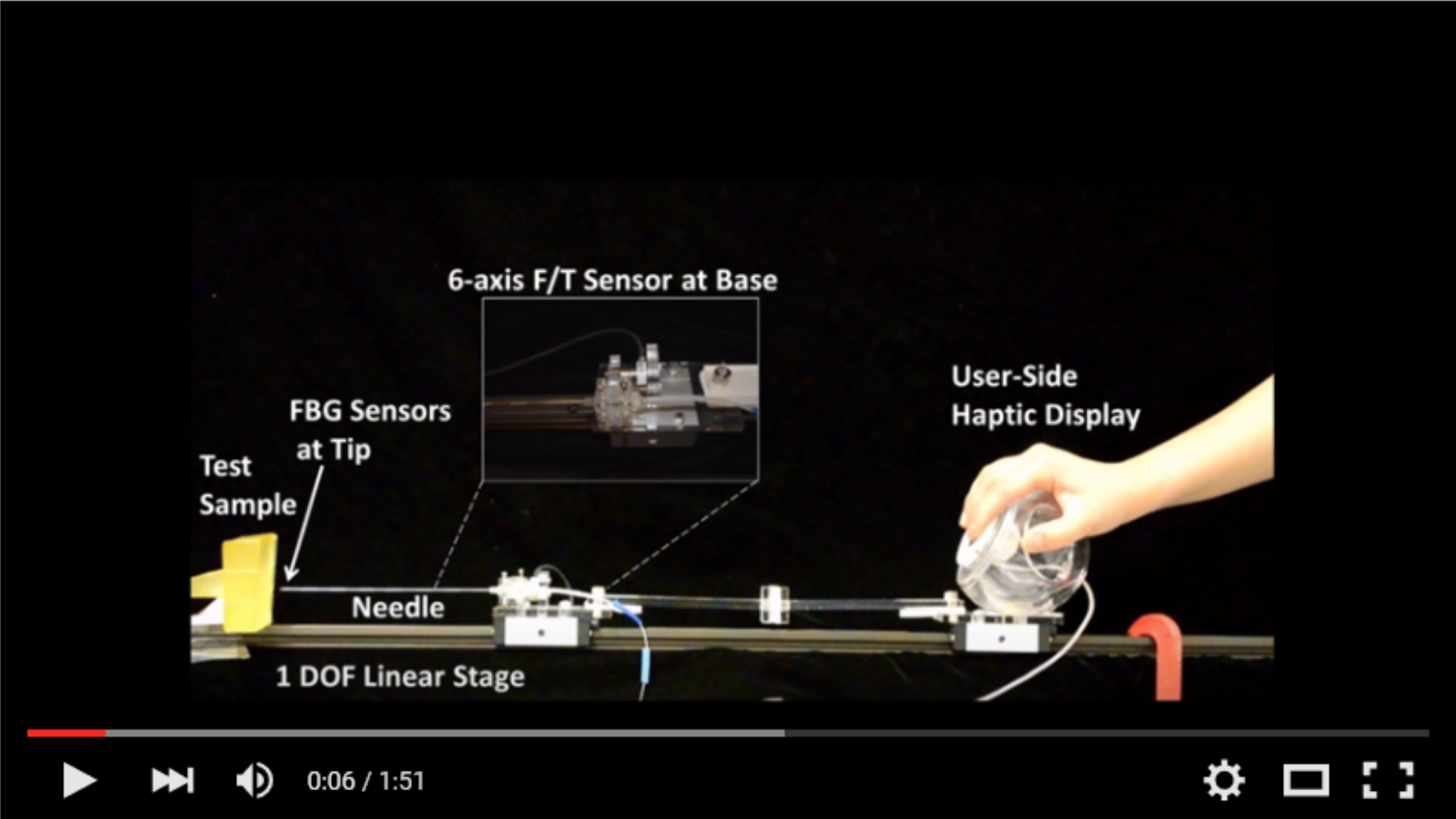
3. Videos
- The tip force and shape sensing needle:
- Haptic display demonstrated at World Haptics Conference 2013. The demonstration was in the top 4 People's Choice for Best Demo:
 |  |
| https://www.youtube.com/watch?v=MANO_SnHng0 | https://www.youtube.com/watch?v=ZegX8CAMetM |
4. What�s New
Comming June 2017 - Paper Bae, J.H.*, Han ,A. K.*, Ploch, C. J., Daniel, B. L. , Cutkosky, M. R. , "Haptic feedback of membrane puncture with an MR-compatible instrumented needle and electroactive polymer display," (preprint). will be presented at IEEE World Haptics 2017
April 2016 - Paper "Display of Needle Tip Contact Forces for Steering Guidance," was presented at Haptics Symposium 2016,
Sept 2014 - Paper "Detection of Membrane Puncture with Haptic Feedback using a Tip-Force Sensing Needle," was presented at IROS,Sept.2014
April 2013 - Paper "Mr-compatible biopsy needle with enhanced tip force sensing," World Haptics Conference (WHC), 2013 , vol., no., pp.109,114, 14-17 April 2013 doi: 10.1109/WHC.2013.6548393
5. Links
6. Publications
Bae, J.H.*, Han ,A. K.*, Ploch, C. J., Daniel, B. L. , Cutkosky, M. R. , "Haptic feedback of membrane puncture with an MR-compatible instrumented needle and electroactive polymer display," Accepted to IEEE World Haptics 2017 (preprint).
Han, A.K., Wang, S., Bae, J.H., Christensen, D.L., and Cutkosky, M.R., "Toward MR-Compatible Needle Tip Force Display using EAP Actuation," Haptics Symposium 2016.
Bae, J.H., Ploch, C., Yang, M. A., Daniel, B.L., and Cutkosky, M.R., "Display of Needle Tip Contact Forces for Steering Guidance," Haptics Symposium 2016 Haptics Symposium (HAPTICS), 2016 IEEE, 332-337
Elayaperumal, S., Bae, J.H., Daniel, B.L. and Cutkosky, M.R.,"Detection of Membrane Puncture with Haptic Feedback using a Tip-Force Sensing Needle," IROS,2014,vol.,no.,pp.3975 - 3981,14-18 Sept. 2014 doi:10.1109/IROS.2014.6943121
Elayaperumal, S.; Bae, J.H.; Christensen, D.; Cutkosky, M.R.; Daniel, B.L.; Black, R.J.; Costa, J.M.; Faridian, F.; Moslehi, B., "Mr-compatible biopsy needle with enhanced tip force sensing," World Haptics Conference (WHC), 2013 , vol., no., pp.109,114, 14-17 April 2013 doi: 10.1109/WHC.2013.6548393