Rotorcraft perching, recovery, and takeoff
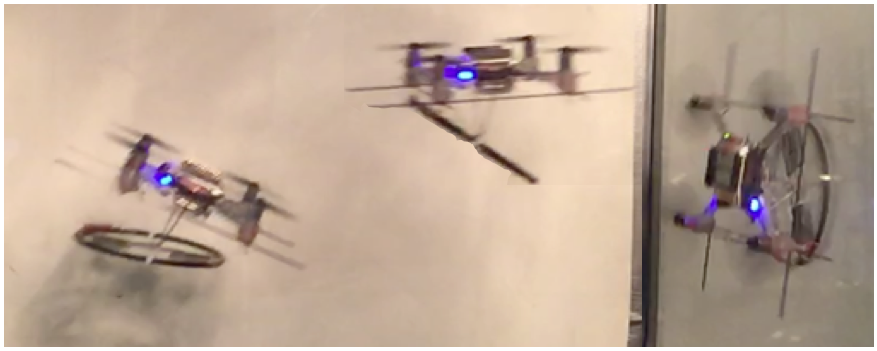
Perching at Stanford using the Bitcraze Crazyflie and onboard sensing.

Perching at the University of Pennsylvania using AscTec Hummingbird and VICON.

Perching at the University of Maryland using the UMD MicroQuad and VICON.
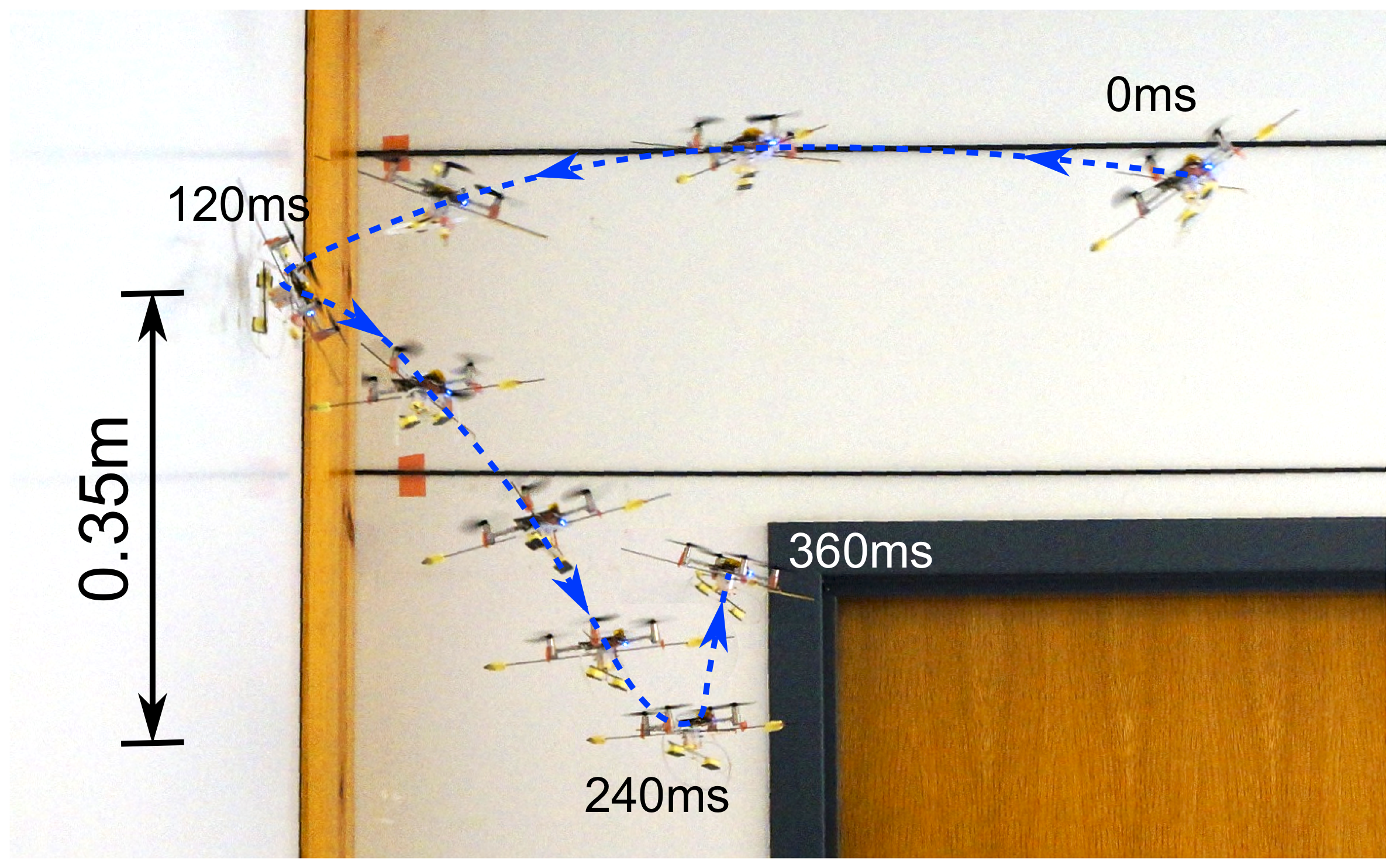
| This project seeks to adapt what we have learned on climbing robots and fixed-wing perching to enable small rotorcraft to easily land, attach, detach and move along walls, ceilings and other surfaces in intermittent contact. The project is supported partly under ARL MAST (MCE 13-4.4) and by the National Science Foundation (IIS_1161679). We are collaborating with Vijay Kumar's GRASP lab, Prof. Sean Humbert's lab at U. Maryland and with Russ Tedrake's lab at MIT. We use a dynamic high-pitch-rate maneuver to allow us to perch using an undercarriage-mounted gripper. This allows us to also use our adhesives for grasping tasks. |  |
Recent work has enabled us to distinguish between success and failure using only the onboard accelerometer as feedback. We can then initiate a recovery routine. To determine what signals distinguished success and failure, we used a machine learning algorithm. After dozens of ballistically launched trials, we converged on a set of markers that distinguished between success and failure with 90 percent accuracy within 40 ms of impact. We extracted the most important feature from this algorithm and implemented it on the Crazyflie quadrotor. In twenty trials, fifteen of which were failures, the algorithm correctly differentiated between success and failure every time. The recovery routine halted downward motion after, on average, an 80 cm drop.||
| To perch on smooth surfaces like glass or acrylic, we use a gecko-inspired dry adhesive. This adhesive sticks when loaded in the correct mix of shear and normal. To allow us to load our grippers in a larger range of angles and to perch on both vertical and inverted surfaces, we use an opposed-grip configuration that loads two pads in opposition to each other. This provides the necessary shear load to create good normal adhesion. The mechanism must be designed with sufficient compliance to allow it to align with the target surface. Because perching happens in a very short time, the dynamic demands on the adhesive are very high, and start to push against the time constant of the micro wedges moving from an unloaded to a loaded state. The current mechanism uses a collapsing truss to first compress the wedges against the glass with high force before loading them in shear. This allows the adhesive to respond with great speed and retain near-static force capability. When detachment is desired, a peeling moment can be initiated at any of the corners of the adhesive tiles. | 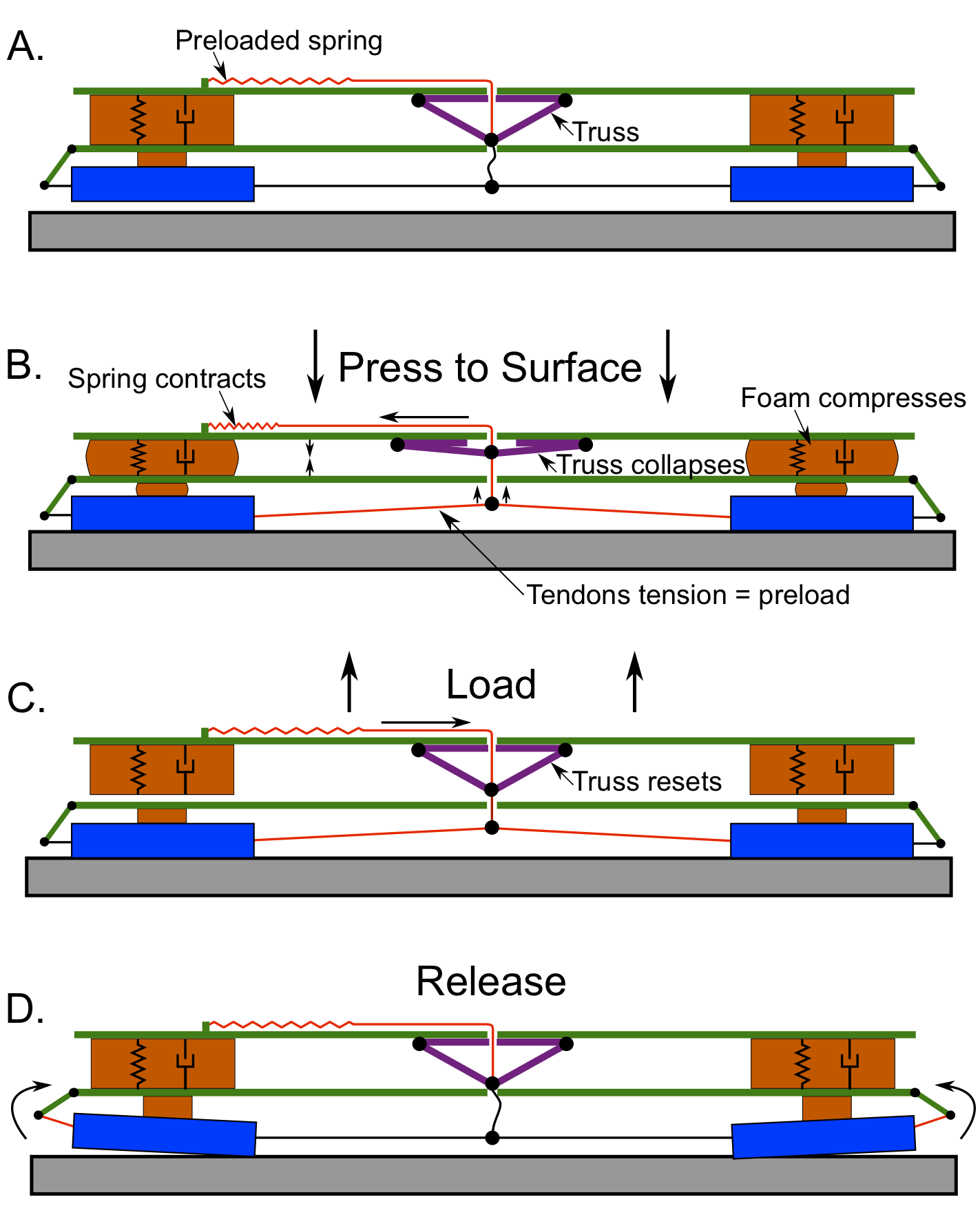 |
| To export this technology to our collaborators, we have found it useful to define "landing envelopes" - a set of initial conditions which we can reasonably expect will lead to consistent perching success. We explore these envelopes empirically, by ballistically launching a quadrotor, and analytically by detailed numerical simulation and by informative analytic approximations. Our partner labs then create control strategies that bring the quadrotor within the specified landing envelope. | 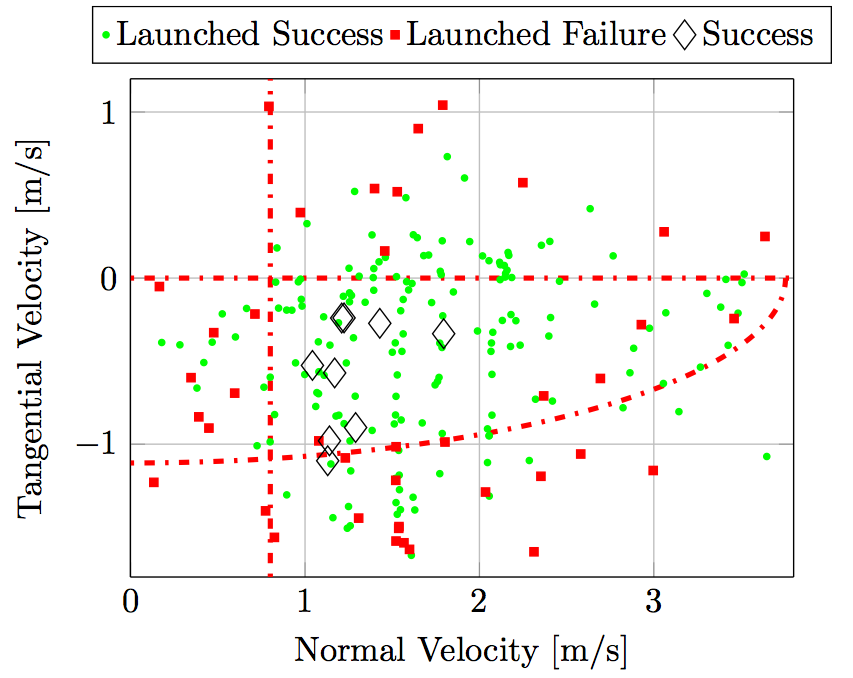 |
EarlyDynamicRotorcraftMechanismsWorkBlog
Videos
(from Rotorcraft Perching Videos)
- Perching Recovery at Stanford
- Perching at UPenn - collaboration with GRASP lab.
- Summary of perching work at UPenn and UMD
- Perching outdoors using microspines
- Testing mechanism on UPenn Hummingbird with the ADEPT robot arm
- Early perching experiments at UMD
In the news
(from Rotorcraft Perching News)
New approach to perching gets some coverage: SlashGear, DigitalSpy, TechInsider, ZeeNews, Mashable, Gizmodo, The Verge, TechXplore, Geek.com, SeriousWonder. Original post on IEEE Spectrum
This New York Times article covers our quadrotor perching collaboration with UPenn and reviews a lot of other cool related projects in the lab.
PopSci and Gizmodo have some good coverage on our collaboration with the University of Maryland.
Publications
(from PerchingPublications)
Hoffmann, K.A.W., Chen, T.G., Cutkosky, M.R., and Lentink, D., Bird-inspired robotics principles as a framework for developming smart aerospace materials, Review article for special edition on Multifunctional Composites for Autonomic, Adaptive and Self-Sustaining Systems, Journal of Composite Materials (preprint). https://journals.sagepub.com/doi/10.1177/00219983231152663
Chen, A.G., Hoffmann K, Low JunEn, Nagami, K, Lentink, D. and Cutkosky, M.R., (Aerial Grasping and the Velocity Sufficiency Region, IEEE RA Letters, 2022). -- Best Paper Award on Robot Mechanisms and Design, IEEE IROS 2022.
Roderick, William RT, Mark R. Cutkosky, and David Lentink. "Bird-inspired dynamic grasping and perching in arboreal environments." Science Robotics 6, no. 61 (2021): eabj7562.
Roderick, William RT, Diana D. Chin, Mark R. Cutkosky, and David Lentink. "Birds land reliably on complex surfaces by adapting their foot-surface interactions upon contact." Elife 8 (2019): e46415.
Jiang, Hao, Shiquan Wang, and Mark R. Cutkosky. "Stochastic models of compliant spine arrays for rough surface grasping." The International Journal of Robotics Research 37, no. 7 (2018): 669-687.
Estrada, M.A., Mintchev, S., Christensen, D.L., Cutkosky, M.R., and Floreano., D., �Forceful manipulation with micro air vehicles,� Science Robotics. 2018: doi: 10.1126/scirobotics.aau6903
Jiang, H., 2017. Surface Grasping with Bio-Inspired, Opposed Adhesion (Doctoral dissertation, Stanford University).
Roderick W.R.T., Jiang H., Wang S., Lentink D., Cutkosky M.R. (2017) Bioinspired Grippers for Natural Curved Surface Perching. In: Mangan M., Cutkosky M., Mura A., Verschure P., Prescott T., Lepora N. (eds) Biomimetic and Biohybrid Systems. Living Machines 2017. Lecture Notes in Computer Science, vol 10384. Springer, Cham. https://doi.org/10.1007/978-3-319-63537-8_56
Roderick, W. R. T., Cutkosky, M. R. & Lentink, D. (2017) Touchdown to take-off: at the interface of flight and surface locomotion. Interface Focus 7, 20160094. http://dx.doi.org/10.1098/rsfs.2016.0094
M. T. Pope; C. W. Kimes; H. Jiang; E. W. Hawkes; M. A. Estrada; C. F. Kerst; W. R. T. Roderick; A. K. Han; D. L. Christensen; M. R. Cutkosky, "A Multimodal Robot for Perching and Climbing on Vertical Outdoor Surfaces," in IEEE Transactions on Robotics , doi: 10.1109/TRO.2016.2623346
Pope, Morgan, "Creatures of two worlds : small robots and hybrid aerial-terrestrial locomotion," PhD thesis, July 2016.
Pope, Morgan and Cutkosky, Mark, "Thrust-Assisted Perching and Climbing for a Bioinspired UAV," Biomimetic and Biohybrid Systems: 5th International Conference, Living Machines 2016 (Best Paper Winner). Proceedings: Springer Lecture Notes in AI, 2016. DOI: 10.1007/978-3-319-42417-0_26
Jiang, H., Pope, M.T., Estrada, M.A., Edwards, B., Cuson, M., Hawkes, E.W., Cutkosky, M.R., "Perching Failure Detection and Recovery with Onboard Sensing," IEEE/RSJ IROS 2015 (preprint).
Wissa, A., Han, A. and Cutkosky, M.R., "Wings of a Feather Stick Together," 'Biomimetic and Biohybrid Systems, Lecture Notes in Artificial Intelligence, Wilson, S.P., Verschure, P..F.M.J., Mura, A and Prescott, T. (eds.), Springer, Vol. 9222 2015, pp. 123-134. DOI 10.1007/978-3-319-22979-9
Estrada, M.A., Hawkes, E.W., Christensen, D.L., and Cutkosky, M.R., "Perching and Crawling: Design of a Multimodal Robot," IEEE/ICRA 2014 (preprint). Best Paper Finalist
Jiang, H., Pope, M.T., Hawkes, E.W., Christensen, D.L., Estrada, M.A., Parlier, A., Tran, R., and Cutkosky, M.R., "Modeling the Dynamics of Perching with Opposed-Grip Mechanisms," accepted for IEEE/ICRA 2014 (preprint).
Hawkes, E.W., Christensen, D.L., Eason, E.V., Estrada, M.A., Heverly, M., Hilgemann, E., Jiang, H., Pope, M.T., Parness, A., and Cutkosky, M.R., "Dynamic Surface Grasping with Directional Adhesion," accepted for IEEE/RSJ IROS 2013 (preprint).
Elena Leah Glassman, Alexis Lussier Desbiens, Mark Tobenkin, Mark Cutkosky, and Russ Tedrake. Region of attraction estimation for a perching aircraft: A Lyapunov method exploiting barrier certificates. IEEE International Conference on Robotics and Automation (ICRA), St. Paul, Minnesota, May 14-18, 2012 (preprint)
Alexis Lussier Desbiens, Alan T. Asbeck and Mark R. Cutkosky, "Landing, Perching and Taking Off from Vertical Surfaces", International Journal of Robotics Research, March 2011 vol. 30 no. 3, pp 355-370.
Alexis Lussier Desbiens, Alan Asbeck and Mark R. Cutkosky, "Hybrid Aerial and Scansorial Robotics", ICRA, May 2010, Anchorage, Alaska.
- ICRA_2010.mp4: Video for ICRA 2010 showing an overview of the perching project, including both landings and takeoffs
Alexis Lussier Desbiens, Alan Asbeck and Mark R. Cutkosky, "Scansorial Landing and Perching", Proc. 14th International Symposium on Robotics Research, September 2009, Lucerne, Switzerland.
Alexis Lussier Desbiens and Mark Cutkosky, "Landing and Perching on Vertical Surfaces with Microspines for Small Unmanned Air Vehicles (UAVs)," presented at UAV'09, June 8-10, Reno, NV and included in Journal of Intelligent and Robotic Systems, Vol. 57, No. 1-4, p. 313-327 DOI: 10.1007/s10846-009-9377-z
Alexis Lussier-Desbiens and Mark Cutkosky, October 2008 whitepaper on our perching approach for small airplanes.