Adhesion, Perching, SpaceRobotics
On this page... (hide)
1. Grasping in Space with Gecko-Inspired Adhesives
Early findings regarding attachment to rotating surfaces without gravity assistance are included in a new paper: Gecko-Inspired Adhesive Lasso for De-tumbling Orbital Debris (preprint).
Things to update here reverse chron. order
- new Gecko Lasso stuff (iSparo2025)
- IEEE low temperature testing (Asteria)
- Earlier ISS Astrobee testing (IEEE RAM paper for details) - brief summary
- Earlier work with JPL and large gripper in microgravity - brief summary

Click image to animate
The image above is from WorkingModel2D. It animates what happens just after a patch of gecko adesive attaches to a 100kg rotating cylinder. The other end of the tether is "controlled" by a small rectangular acquisition vehicle with two soft, high-friction arms.
2. Adhesive Grasping Technologies
The projects above draw upon two older technologies for grasping flat and curved surfaces, respectively. These technologies are also now marketed by GeckoMaterials and Flexiv [links]
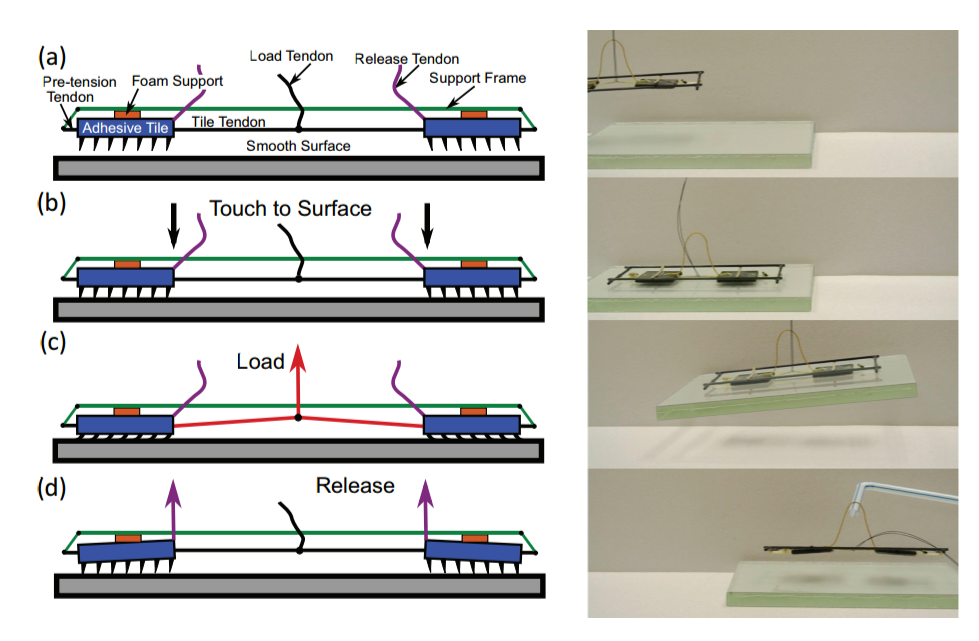
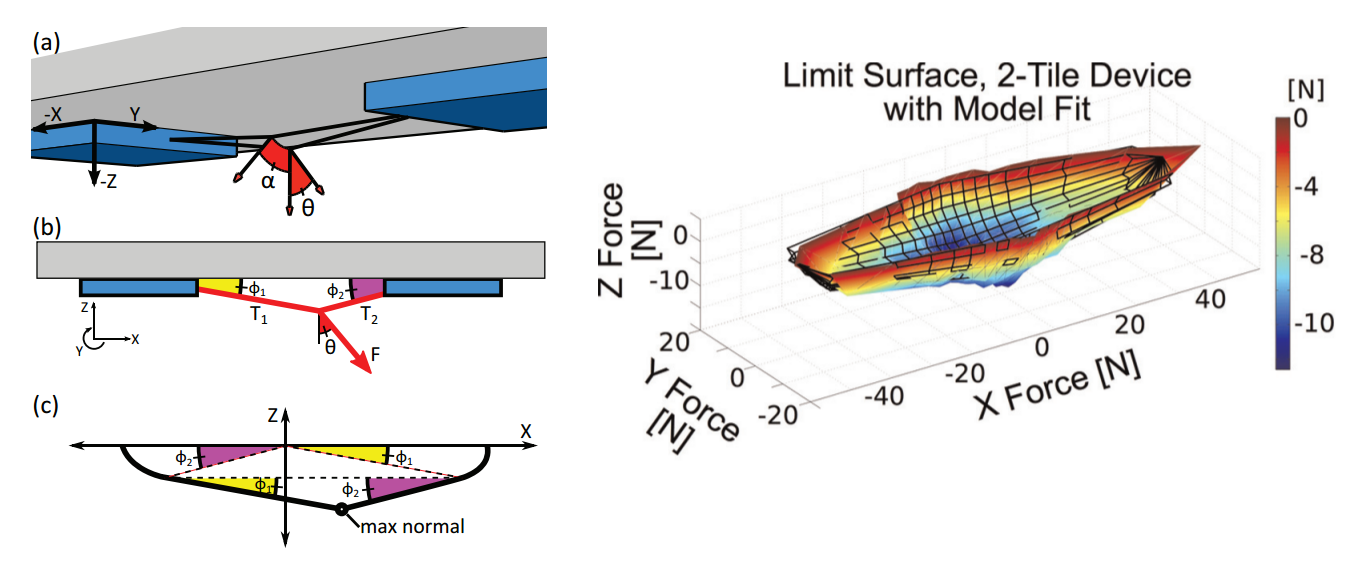
2.1 Flat Surface Two-tile Gripper
The flat surface gripper consists of two 1 inch^2 tile adhesives with rigid backing and in opposed directions. When the gripper is loaded straight up with the load tendon, the two pieces of adhesives are pulled inward towards each other so that the shear force cancels and the normal force can be generated. When pulled in other directions, some shear force are left. When the loading force is removed, the adhesives become non-sticky again, and a tiny force is needed to detach the gripper from the surface. The process is shown in the following figures.
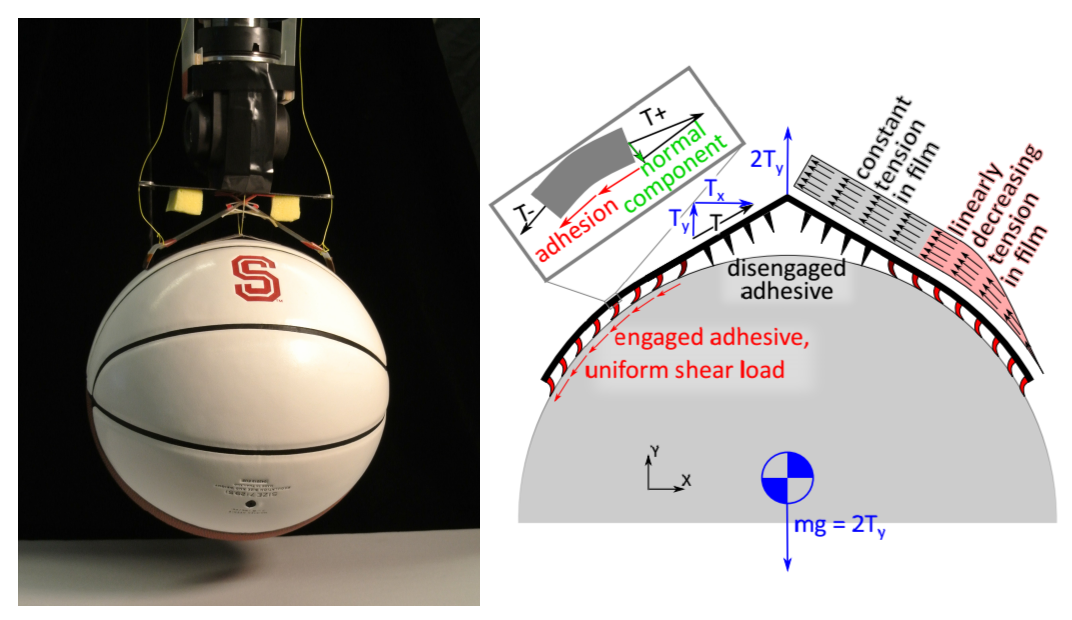
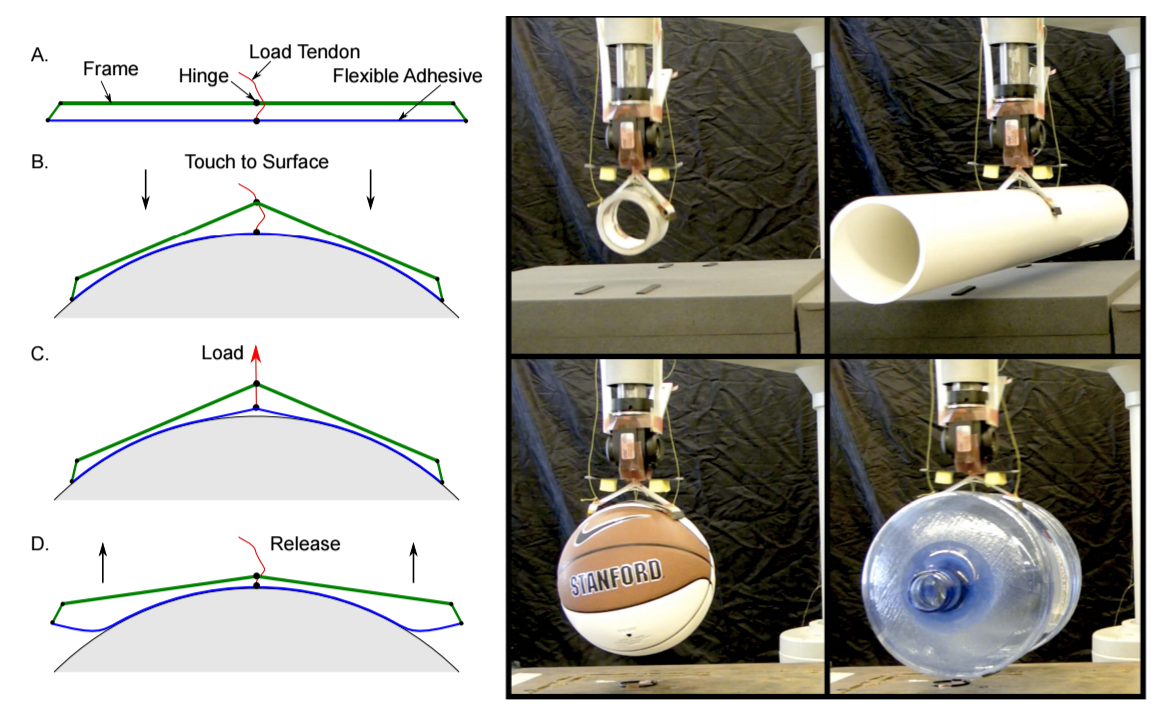
2.2 Curved Surface Thin-film Gripper
The two-tile gripper works well on flat surfaces because the rigid backing can support normal stress, but it also has a disadvantage that small dirts or curvatures on a surface can make the rigid tile kink and not contact with surface well. Thus the two-tile gripper does not work well on curved surfaces.
However, with the thin-film gripper, the grasp is totally relied on the shear adhesive forces that are pointed to each other with a tilt angle due to the curvature. Again, the horizontal components of the adhesive forces are canceled and the vertical components add up. Because this gripper only uses shear adhesion and has a thin and flexible backing, it is very robust to dirts and curvatures, but it does not work on flat surfaces.
2.3 Space Gripper --- Combined Gripper for Large Loads
move up or make its own page with short summary above
The gecko material works at low temperatures and in vacuum and thus is suitable for space related applications. We collaborate with Dr. Aaron Parness at JPL to apply the above grippers to grasping and recycle space junk. To ensure the safety factor for taking large loads, we scale up the above grippers and combine them. A number of grippers are connected by a pulley system to share the load as evenly as possible. Curved surface grippers are deployed in the curved surface mode and retracted in the flat surface mode. Touch sensors on the outriggers detects the contact with the surface to trigger the grasp. Before grasping, the gimbal wrist mitigates the misalignment between the gripper and the object. After the grasp, 4 super elastic SMAs on the 4 sides of the gripper tension up the wrist to ensure a stiff grasp while protecting the gripper from moment overloading due to their nearly constant force super elasticity. The big hysteresis of these SMAs also help absorb the angular kinetic energy. For assistive free-flyer perching and grasping in outer space, see Assistive Free-Flyer Grasping.