Adhesion, MobileManip, SpaceRobotics
On this page... (hide)
1. Vision
We are working in collaboration with the Stanford Autonomous Systems Lab and the Intelligent Robotics Group at NASA Ames on an Early Stage Innovations grant. We plan to equip Assistive Free Flyers (AFFs), small robots aboard the International Space Station, with gecko-inspired gripper appendages to aid astronauts.
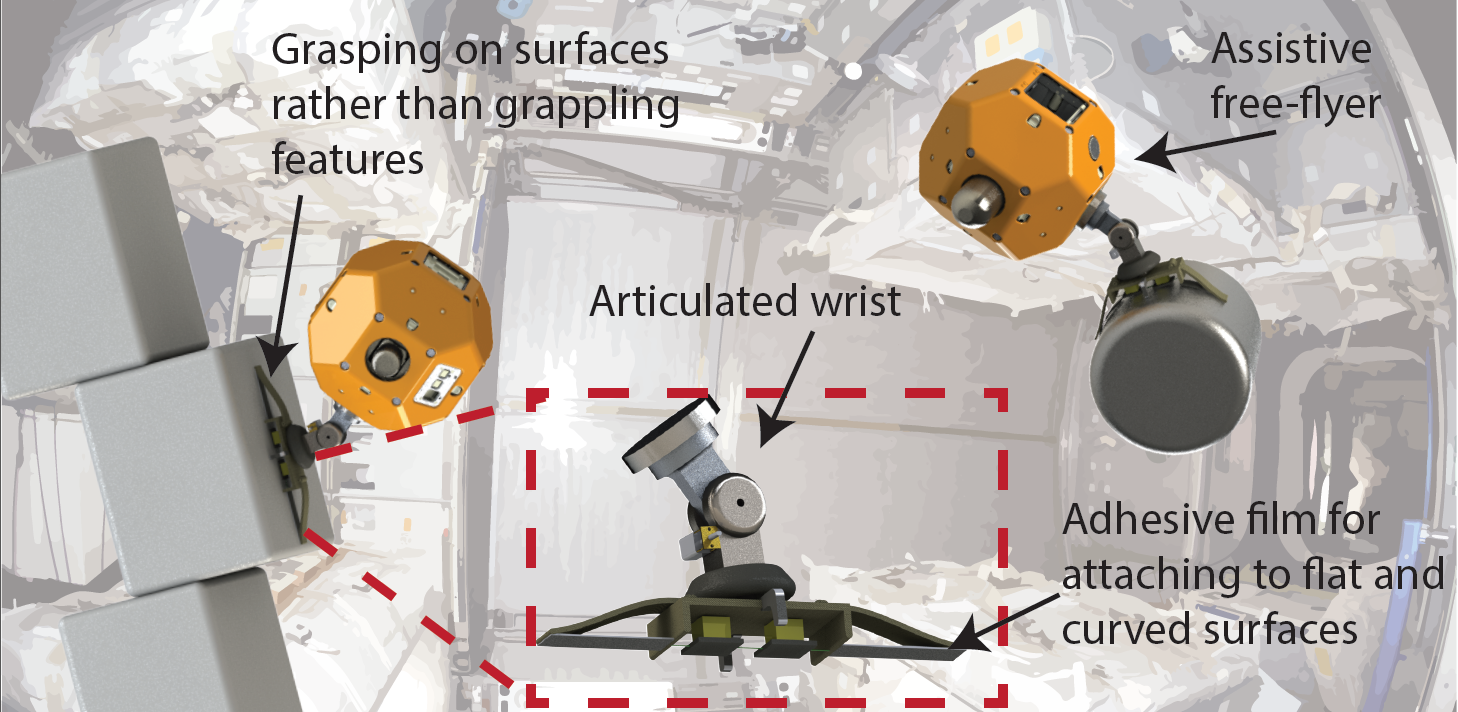
Free fliers use adhesive grippers to manipulate objects in the ISS
2. Summer 2019 Update
We have embarked on a plan to build a 4-tile gecko-gripper for Astrobee Free Flyers to be launched to the ISS.
- Through the 2018-2019 academic year we engaged in an extensive approval process with NASA to satisfy requirements regarding materials, safety, noise, temperature, electromagnetic emissions, etc.
- In early spring we were approved for launch aboard one of the Space-X rockets, accompanying Astrobee
- July 24: Launch
- July 27: Dragon capsule arrives at ISS
3. Grasping with Gecko-Inspired Adhesives

Lifting a bag of water
using only shear forces
Gecko-inspired adhesion is capable of grasping surfaces rather than discrete features on an object. New strategies for grasping and manipulation leveraging this unique ability are being explored. Such grippers require very little force to engage with a surface and can grasp surfaces much larger than their actual span. Our gecko grippers are able to "grasp without squeezing," maintaining a hold on objects without pushing them out of their grasp.
The adhesive material is passive and space-qualified. Versions have undergone environmental testing including exposure to temperatures of −80°C, vacuum pressures, and doses of radiation without significantly degrading performance.
4. Modeling
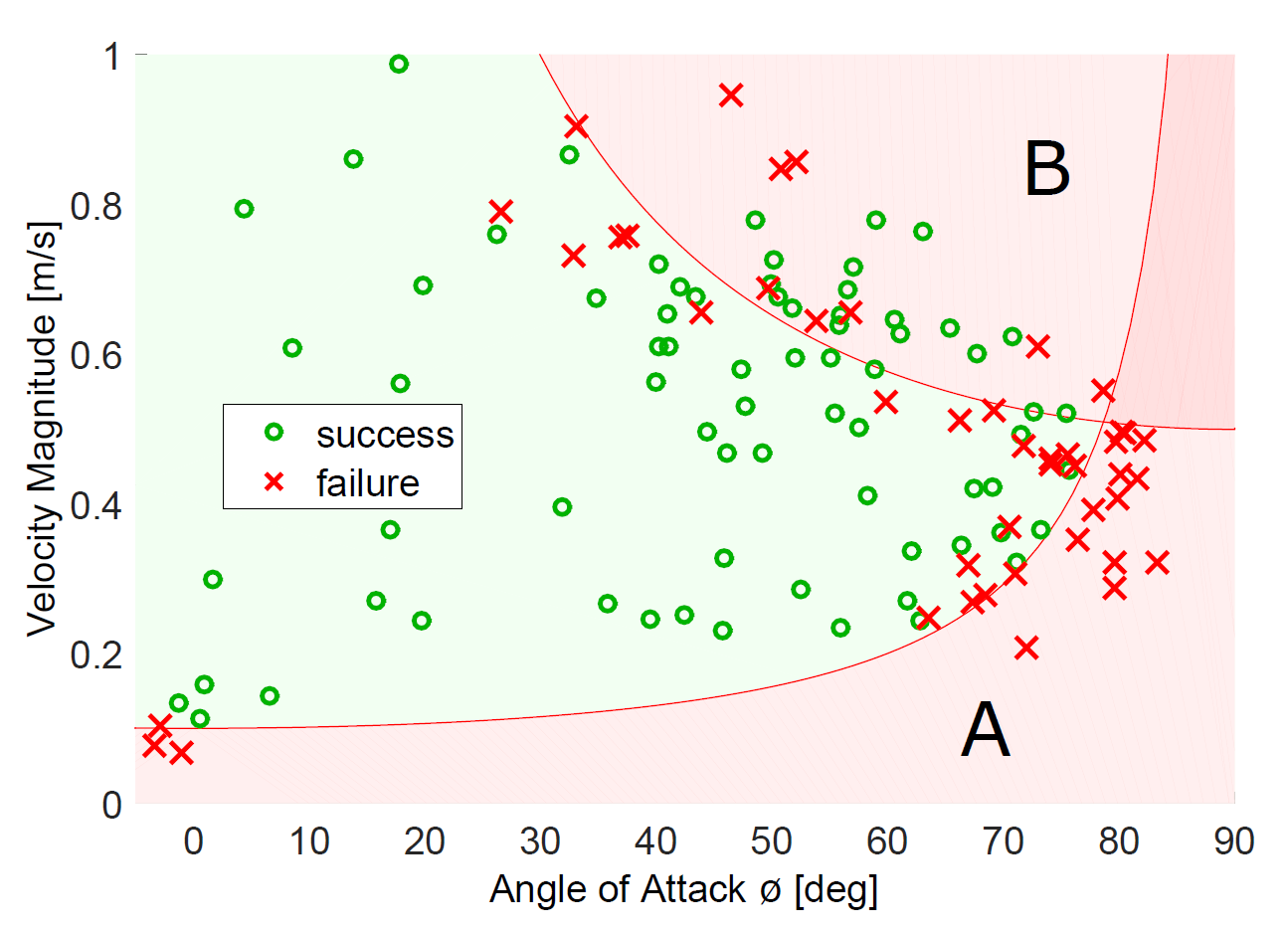
Initial work on grasping free floating objects has explored landing envelopes on the ASL's free flyer table simulating microgravity in 2D. Bounds on successful acquisition of spinning objects have been established and will in turn guide the design and control behind assistive free flyers. The grippers are tolerant to a spread of conditions on approach angles and velocities. The goal of trajectory planning will be to ensure maneuvers fall within this verified, successful envelope.
Constraints on the gripper's ability to acquire an object include limitations on the minimum incoming linear momentum, and a maximum angular momentum the gripper is able to arrest after contact is made.
5. Experiments on Stanford Free Flyer Testbed
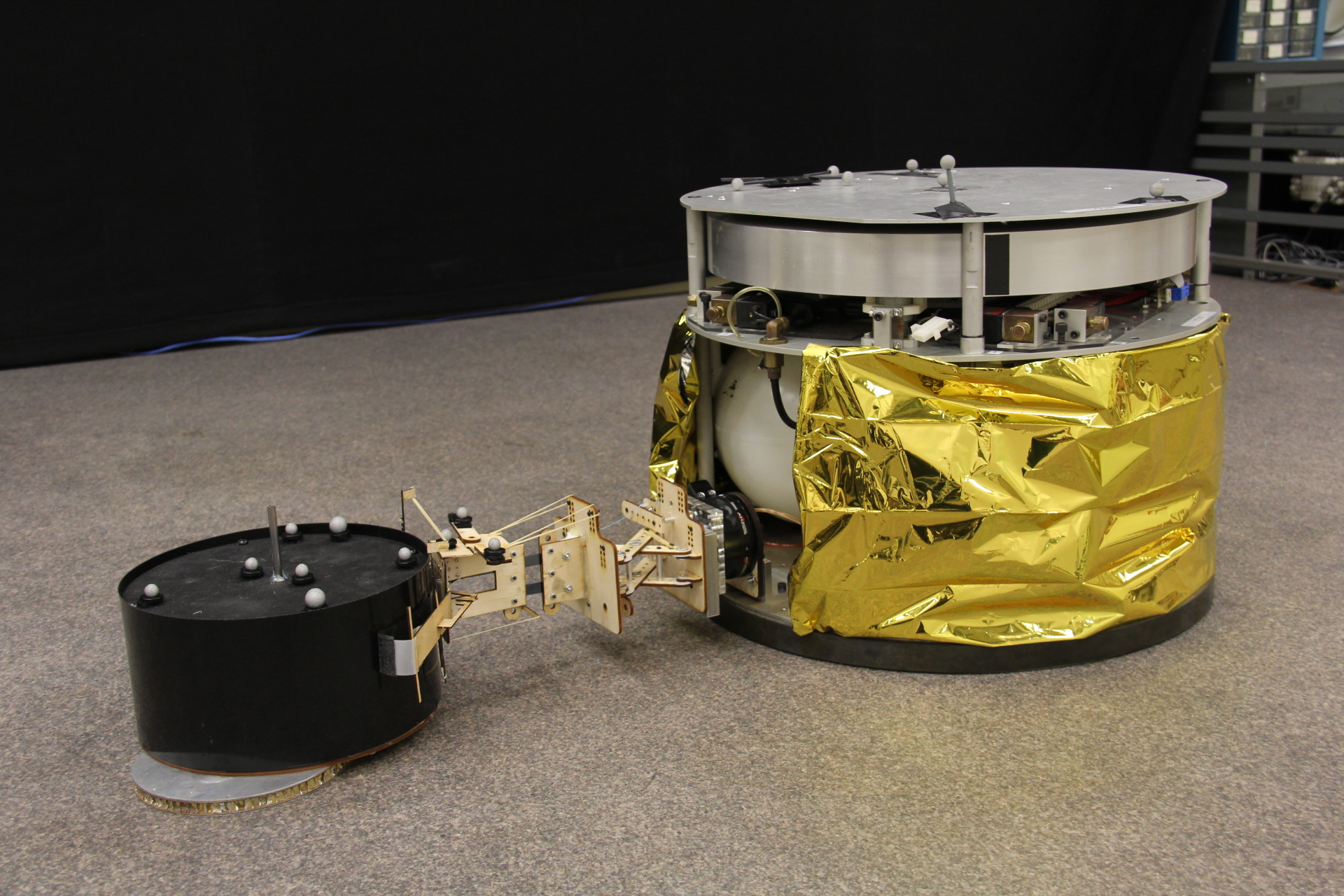
Grasping experiments are conducted on the Stanford free-flyer test bed—a 2D microgravity analog consisting of a 3x4 m granite table with a precisely calibrated flat and level surface, on which robotic platforms can drift on air bearings with near-zero friction.
Motion of objects are tracked and recorded to sub-millimeter precision using an OptiTrack motion capture system running at 120 Hz.
6. Research Team and Collaborations
2015 NASA Early Stage Innovations (ESI) Team
Project Title: Assistive Free-Flyers with Gecko-Inspired Adhesive Appendages for Automated Logistics in Space
NASA ESI grant NNX16AD19G
- PI: Mark Cutkosky, Stanford University
- Co-I: Marco Pavone, Stanford University Autonomous Systems Lab
- NASA ESI Collaborator: Terry Fong Intelligent Robotics Group
- Consultant: Jeffrey Hoffman, MIT
- Collaborator: Aaron Parness, Jet Propulsion Laboratory
- Graduate students: Andrew Bylard, Matt Estrada, Ben Hockman
Related groups within the program:
- Matt Spenko The Robotics Lab, Illinois Institute of Technology
- Matei Ciocarlie Robotic Manipulation and Mobility Lab, Columbia University
7. Publications
Hajj-Ahmad, Amar, Lukas Kaul, Carolyn Matl, and Mark Cutkosky. "GRASP: Grocery Robot's Adhesion and Suction Picker." IEEE Robotics and Automation Letters (2023).
Hajj‐Ahmad, A.*, Han, A.* K., Lin, M. A., Glover, G. H., & Cutkosky, M. R. "An Electrostatically Actuated Gecko Adhesive Clutch." Advanced Materials Technologies 8.12 (2023): 2202025.
Han, A.K.*, Hajj-Ahmad, A.*, and Cutkosky, M.R, “Bimanual handling of deformable objects with hybrid adhesion,” IEEE Robotics and Automation Letters April 2022. IEEE RA-L Best Paper Award Winner, May 2023.
Testing Gecko-Inspired Adhesives With Astrobee Aboard the International Space Station
Hajj-Ahmad, A., Suresh, S. A., and Cutkosky, M. R. (June 6, 2021). "Cutting to the Point: Directly Machined Metal Molds for Directional Gecko-Inspired Adhesives." ASME. J. Micro Nano-Manuf. doi: https://doi-org.stanford.idm.oclc.org/10.1115/1.4051406
Kerst, Capella, Srinivasan A. Suresh, Marc Ferro, and Mark Cutkosky. "PEDOT: PSS Coating Improves Gecko-Inspired Adhesive Performance." Journal of Micro and Nano-Manufacturing 8, no. 3 (2020). https://doi-org.stanford.idm.oclc.org/10.1115/1.4048927
Kerst, Capella F., "Gecko inspired adhesives : permanent practical manufacturing, new materials, and applications," PhD Thesis, Stanford Universisty, December 2020.
Suresh, Srinivasan A., Amar Hajj-Ahmad, Elliot W. Hawkes, and Mark R. Cutkosky. "Forcing the issue: testing gecko-inspired adhesives." Journal of the Royal Society Interface 18, no. 174 (2021): 20200730. https://doi-org.stanford.idm.oclc.org/10.1098/rsif.2020.0730
Han, A.K., Hajj-Ahmad, A., and Cutkosky, M.R., "Hybrid electrostatic and gecko-inspired gripping pads for manipulating bulky, non-smooth items,” Smart Materials and Structures. 2020 https://doi.org/10.1088/1361-665X/abca51
Suresh, S.A. "Engineering Gecko-Inspired Adhesives." Ph.D. thesis, Stanford University, 2020. [Online]. Available: https://purl.stanford.edu/cp134gr3166.
Kerst, C.F., Suresh, S.A., Cutkosky, M.R. "Creating Metal Molds for Directional Gecko-Inspired Adhesives." ASME Journal of Micro and Nano-Manufacturing. 2019 doi: 10.1115/1.4045764.
Suresh, S.A., Kerst, C.F., Cutkosky, M.R., Hawkes, E.W. "Spatially variant microstructured adhesive with one-way friction." Journal of the Royal Society Interface. 2019. doi: 10.1098/rsif.2018.0705
Naclerio, N., Kerst, C.F., Haggerty, D.A., Suresh, S.A., Singh, S., Ogawa, K., Miyazaki, S., Cutkosky, M.R., Hawkes, E.W., "Low-cost, Continuously Variable, Strain Wave Transmission Using Gecko-inspired Adhesives," IEEE RA-Letters'', 2019. doi: 10.1109/LRA.2019.2893424
Estrada, M.A., Mintchev, S., Christensen, D.L., Cutkosky, M.R., and Floreano., D., “Forceful manipulation with micro air vehicles,” Science Robotics. 2018: doi: 10.1126/scirobotics.aau6903
Roberge, J.P., Ruotolo, W., Duchaine, V. and Cutkosky, M., 2018. Improving industrial grippers with adhesion-controlled friction. IEEE Robotics and Automation Letters. 2018 doi:10.1109/LRA.2018.2794618
Glick, P., Suresh, S.A., Ruffatto III, D., Cutkosky, M.R., Tolley, M.T., and Parness, A. "A soft robotic gripper with gecko-inspired adhesive." Robotics and Automation Letters. 2018. doi:10.1109/LRA.2018.2792688.
Jiang, H., Hawkes, E.W., Fuller, C., Estrada, M.A., Suresh, S.A., Abcouwer, N., Han, A.K., Wang, S., Ploch, C.J., Parness, A. and Cutkosky, M.R. "A Robotic Device Using Gecko-Inspired Adhesives can Grasp and Manipulate Large Objects in Microgravity." Science Robotics. 2017. doi:10.1126/scirobotics.aan4545.
Hawkes, E. W., Jiang, H., Christensen, D. L., Han, A. K., & Cutkosky, M. R. (2017). Grasping Without Squeezing: Design and Modeling of Shear-Activated Grippers. IEEE Transactions on Robotics. 2019 IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award
Estrada, M., Jiang, H., Noll, Bessie., Pavone, M., and Cutkosky, M.R., "Force and Moment Constraints of a Curved Surface Gripper and Wrist for Assistive Free Flyers," 2017 IEEE International Conference on Robotics and Automation (Accepted)
Hawkes, E.W., Christensen, D.L., Pope, M.T., and Cutkosky, M.R., "One Motor, Two Degrees of Freedom through Dynamic Response Switching." Robotics and Automation Letters. Published online February 15, 2016. http://dx.doi.org/10.1109/LRA.2016.2526066. To be presented at ICRA 2016. (preprint)
Christensen, D.L., Suresh, S.A., Hahm, K. and Cutkosky, M.R., "Let’s All Pull Together: Principles for Sharing Large Loads in Microrobot Teams." Robotics and Automation Letters. Published online February 15, 2016. DOI:10.1109/LRA.2016.2530314. Presented at ICRA 2016 as well. (preprint)
Estrada, M., Hockman, B., Bylard, A., Hawkes, Elliot Wright., Cutkosky, M., Pavone, M., "Free Flyer Acquisition of Spinning Objects with Gecko-Inspired Adhesives," 2016 IEEE International Conference on Robotics and Automation
Hawkes, E.W., Jiang, H., and Cutkosky, M.R. "Three-dimensional dynamic surface grasping with dry adhesives." International Journal of Robotics Research. Published online before print June 29, 2015 Doi: 10.1177/0278364915584645.
Hawkes, E.W., Christensen, D.L., Han, A.K., Jiang, H. and Cutkosky, M.R., "Grasping without Squeezing: Shear Adhesion Gripper with Fibrillar Thin Film," IEEE/ICRA 2015 Best Student Paper Award
Hawkes, E.W., Christensen, D.L., and Cutkosky, M.R., "Vertical Dry Adhesive Climbing with a 100x Bodyweight Payload," IEEE/ICRA 2015 (preprint).
Christensen, D.L., Hawkes, E.W., Suresh, S.A., Ladenheim, K. and Cutkosky, M.R., "µTugs: Enabling Microrobots to Deliver Macro Forces with Controllable Adhesives," IEEE/ICRA 2015 (preprint).
Hawkes, E. W., "Applying Dry Adhesives to the Real World," Ph.D. thesis, Stanford University, 2015.
Eason, E. V., "Analysis and Measurement of Stress Distributions in Gecko Toes and Synthetic Adhesives," Ph.D. thesis, Stanford University, 2015.
Jiang, H., Hawkes, E.W., Arutyunov, V., Tims, J., Fuller, C., King, J.P., Seubert, C., Chang, H.L., Parness, A., and Cutkosky, M.R., "Scaling Controllable Adhesives to Grapple Floating Objects in Space," IEEE/ICRA 2015.
Eason, E.V., Hawkes, E.W., Windheim, M., Christensen, D.L., Libby, T. and Cutkosky, M.R., "Stress distribution and contact area measurements of a gecko toe using a high-resolution tactile sensor," Bioinspiration & Biomimetics, vol. 10, no. 1, 016013, February 2015. DOI:10.1088/1748-3190/10/1/016013
Hawkes EW, Eason EV, Christensen DL, Cutkosky MR. 2015 Human climbing with efficiently scaled gecko-inspired dry adhesives Journal of the Royal Society Interface 12: 20140675, DOI: 10.1098/rsif.2014.0675 -- Winner, ASME Smart Materials and Structures Best Bio-Inspired Journal Paper Award.
Eason, E.V., Hawkes, E.W., Windheim, M., Christensen, D.L., Libby, T. and Cutkosky, M.R., "Adhesive Stress Distribution Measurement on a Gecko," Living Machines 2014. (preprint)
Estrada, M.A., Hawkes, E.W., Christensen, D.L., and Cutkosky, M.R., "Perching and Crawling: Design of a Multimodal Robot," IEEE ICRA 2014. Best Paper Finalist
Jiang, H., Pope, M.T., Hawkes, E.W., Christensen, D.L., Estrada, M.A., Parlier, A., Tran, R., and Cutkosky, M.R., "Modeling the Dynamics of Perching with Opposed-Grip Mechanisms," IEEE/ICRA 2014 (preprint).
Hawkes, E.W., Christensen, D.L., Eason, E.V., Estrada, M.A., Heverly, M., Hilgemann, E., Jiang, H., Pope, M.T., Parness, A., and Cutkosky, M.R., "Dynamic Surface Grasping with Directional Adhesion," IEEE/RSJ IROS 2013, Nov. 2013.
Hawkes, E.W., Eason, E.V., Asbeck, A.T., and Cutkosky, M.R., "The Gecko’s Toe: Scaling directional adhesives for climbing applications," IEEE/ASME Transactions on Mechatronics, vol. 18, no. 2, pp. 518-526, April 2013. DOI:10.1109/TMECH.2012.2209672
Day, P., Eason, E. V., Esparza, N., Christensen, D., and Cutkosky, M., "Microwedge Machining for the Manufacture of Directional Dry Adhesives," ASME Journal of Micro and Nano-Manufacturing, vol. 1, no. 1, 011001, March 2013. DOI:10.1115/1.4023161
Day, P., "Micro-patterned polymeric surfaces as directional and selective adhesives," Ph.D. thesis, Stanford University, 2012.
Day, P., Cutkosky, M.R. and McLaughlin, A. “Effects of Gamma irradiation on Adhesion of Polymer Micro-structure Based Dry Adhesives,” American Nuclear Society Journal of Nuclear Technology. Vol 180, No. 3, December, 2012, pp. 450-455.
Esparza, N., "Design of Bio-Inspired Directional Tapered Adhesives and Hierarchies," Ph.D. thesis, Stanford University, December 2012.
Asbeck, A.T. and Cutkosky, M.R., "Designing Compliant Spine Mechanisms for Climbing," ASME Journal of Mechanisms and Robotics, Vol. 4, No. 3, August 2012. DOI:10.1115/1.40066591
Hawkes, E.W., Ulmen, J., Esparza, N., and Cutkosky, M.R. "Scaling Walls: Applying Dry Adhesives to the Real World." IEEE IROS 2011, San Francisco, Sept. 2011.
P. Day, M. Cutkosky, R. Greco, and A. Mclaughlin. "The effect of He2+ Ion Irradiation on Adhesion of Polymer Micro-structure Based Dry Adhesives." ANS Journal of Nuclear Science and Engineering. Published March 2011.
D. Soto. "Force Space Studies of Elastomeric Anisotropic Fibrillar Adhesives," Ph.D. thesis, Stanford University, August 2010.
D. Soto, G Hill, A Parness, N Esparza, M Cutkosky, and T Kenny, "Effect of fibril shape on adhesive properties," Appl. Phys. Lett. 97, 053701 (2010), DOI:10.1063/1.3464553.
A. Parness, "Micro-Structured Adhesives for Climbing Applications," Ph.D. thesis, Stanford University, February 2010.
Estrada, M., Jiang, H., Noll, Bessie., Pavone, M., and Cutkosky, M.R., "Force and Moment Constraints of a Curved Surface Gripper and Wrist for Assistive Free Flyers," 2017 IEEE International Conference on Robotics and Automation (Accepted)
Estrada, M., Hockman, B., Bylard, A., Hawkes, Elliot Wright., Cutkosky, M., Pavone, M., "Free Flyer Acquisition of Spinning Objects with Gecko-Inspired Adhesives," 2016 IEEE International Conference on Robotics and Automation (preprint)
8. Links
For space junk grasping and recycling, see Space Gripper for Large Loads.