new web: http://bdml.stanford.edu/pmwiki
TWiki > RisePrivate Web>PrivateRiSE > PerchingBird>PerchingSensors (11 Apr 2011, FredLandavazoIV)
RisePrivate Web>PrivateRiSE > PerchingBird>PerchingSensors (11 Apr 2011, FredLandavazoIV)
Current Sensor
The sensor currently used for perching a high-power ultrasonic sensor, the MB1320. This sensor can detect wall at a distance of up to 7.65m, but has two main drawback:- Low update rate (10 Hz) limited by the speed of sound. As the airplane is flying at about 10-15m/s, and because we need about 5m to perform the maneuver, a missed sample means that we are now 1-1.5m closer to the wall and that we are already a little too close to perform the maneuver. Furthermore, there is no (or only little time) to do velocity estimation by differentiating two position measurements as we need to trigger the maneuver as soon as we detect the wall (and you can only estimate the distance properly when the plane is horizontal, as when the plane pitch up significantly, the distance measurements are not valid anymore).
- Sensitive to ultrasonic noise generated by the propeller (although it is much less than the other version we used: the LV-MaxSonar-EZ series or the Devantech SRF02).
What we would like
- Faster update rate (50-100Hz) to confirm the wall position and estimate velocity.
- Measurement of not only distance/velocity but also angle relative to the wall.
- Lightweight (10-20g)
- Robustness (working in most normal conditions for now).
- Onboard, as much as possible.
Options
Laser Target Finder Sensor
As describe there http://www.philohome.com/sensors/lasersensor.htm. Not a range sensor, but a laser target detector working up to 10m. Interesting use of the Hamamatsu S6986 chip to PWM the laser and make synchronous detection.
PSD (Position Sensitive Detector)
They are one dimensional sensor that can be used to measure distance by a principle similar to the Sharp IR Rangerfinder. We tried to use the GP2Y0A700? , but it is quite big, has a maximum distance of 5.5m (which is a little bit short) and has a non-linear response which reduces its sensitivity significantly for the upper range of the sensor. It frequency is 60Hz, so that is not too bad. Unfortunately, it doesn't do well in the bright outdoor environment, even if the light signal is PWM at roughly 1kHz to prevent false detections. It would be possible to build our own, with sensors like the PSD One-dimensional sensor from Hamamatsu and maybe a using a pulsing signal processing circuit.
MORE FEASIBILITY INVESTIGATION TO BE DONE...
It would be possible to build our own, with sensors like the PSD One-dimensional sensor from Hamamatsu and maybe a using a pulsing signal processing circuit.
MORE FEASIBILITY INVESTIGATION TO BE DONE...
Laser Distance Sensor
A low-cost laser distance sensor has been presented at ICRA 2008. It is a triangulation based laser+CMOS sensor that has a rotating base and can achieve 360deg scans at 10Hz, 1deg resolution and 3cm accuracy up to distances of 6m. By eliminating the rotating base, we can probably create a low cost package that can provide distance measurements at 4kHz... I emailed them to see what they think about it!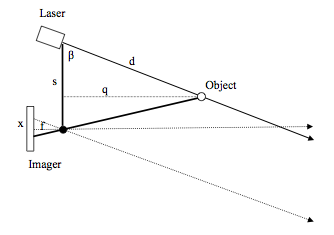 This sensor is used in the XV-11 vacuum cleaning robot from Neato Robotics.
Ultra Low-Cost Laser Rangefinders Actualized by Neato Robotics is another article about it!
This sensor is used in the XV-11 vacuum cleaning robot from Neato Robotics.
Ultra Low-Cost Laser Rangefinders Actualized by Neato Robotics is another article about it!
Laser Range Finder
Something like the HOKUYO URG-04LX. This range finder has a 10 Hz update rate (for line scanning), measure up to 5.6m and has an accuracy of 1%. Unfortunately, it is too heavy (160g) for our application and this is the lighter laser range finder we found. CONTACT THEM TO SEE IF THEY HAVE LIGHTER (MAYBE NON-LINE SCANNING) VERSION?
CONTACT THEM TO SEE IF THEY HAVE LIGHTER (MAYBE NON-LINE SCANNING) VERSION?
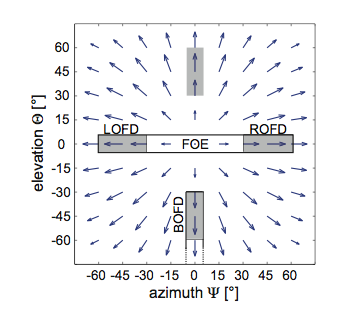
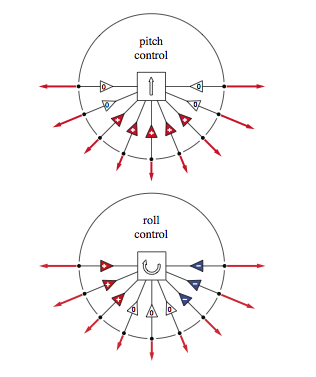
Optical Flow
Optic flow to control small UAVs describes how to use optical flow to control a small UAV. They use "frontal flow" to detect incoming obstacles. To do so, they needs to:- Remove the rotational component of the flow (using gyroscopes)
- Have the angle between the flight direction and the viewing direction of the detector be big enough (45 deg in this case)
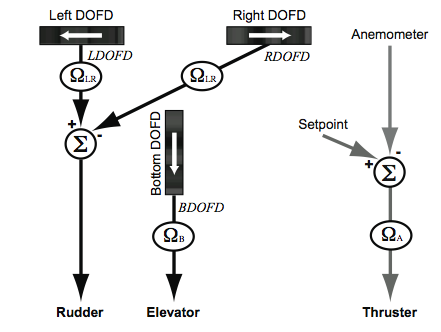
- The forward velocity of the airplane needs to be regulated (speed change the flow)... they are using an anemometer to control the propeller and maintain a constant speed.
 Autonomous flight at low altitude with vision-based collision avoidance and GPS-based path following
optiPilot: control of take-off and landing using optic flow
Both describe how to use multiples optical flow sensor in an autopilot (IMU + GPS + optical flow) to do obstacles avoidance (roll and pitch).
Autonomous flight at low altitude with vision-based collision avoidance and GPS-based path following
optiPilot: control of take-off and landing using optic flow
Both describe how to use multiples optical flow sensor in an autopilot (IMU + GPS + optical flow) to do obstacles avoidance (roll and pitch).
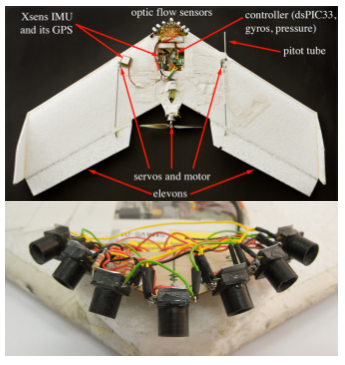 Another, maybe more interesting option is the sensors from Centeye
Another, maybe more interesting option is the sensors from Centeye
 QUESTIONS:
QUESTIONS: - Will it work on wall with few features to create the optical flow.
- How will the optical flow change during a typical (or non-typical) maneuver?
Wii
We could use a Wii image sensor, in a way similar to Wenzel 2009. The Wii sensor can track up to 4 IR sources, has a native resolution of 128x96 (scaled up to 1024x768), an update rate of 100-250Hz, a field of view of 45deg, communicates with I2C? and only weight 0.4g. Apparently, the Wii sensor is 5 times more sensitive to 940nm IR light than 850nm (similar performances with or without the filter). Not sure what is the sensitivity to visible light. The camera pinout is something like that:
The camera pinout is something like that:
 Should use an oscillator that is like that ASFL1-25.000MHZ-EK-T
More details on the camera can be found on :
Should use an oscillator that is like that ASFL1-25.000MHZ-EK-T
More details on the camera can be found on : - Wii Wiki
- Wii Brew
- Wii Whiteboard
- Procrastineering blog - Working with the Pixart camera directly
- Stephen Hobley - Pixart wiimote sensor for Arduino
- http://sales.hamamatsu.com/en/products/laser-group/super-luminescent-diode.php
- http://sales.hamamatsu.com/en/products/laser-group/pulsed-laser-diode.php
- http://sales.hamamatsu.com/en/products/laser-group/cw-laser-diode-array.php
- http://www.luxeonstar.com/
- http://LEDsupply.com
- http://www.rosco.com/us/products/lighting.asp Filters for lighting equipment. Mostly filter for visible light, no bandpass filter...
- http://www.midopt.com/filters.html IR, Bandpass and more specialized filter with screw mount...
Experimenting with the Wii using Sal's board
- Installing the driver for the prolific USB-Serial cable: http://www.prolific.com.tw/eng/downloads.asp?ID=31 (use the third party driver /dev/tty.PL2303-002041FD... this one crash the mac)
- Listening to the serial port on MAC: http://www.tigoe.net/pcomp/resources/archives/avr/000749.shtml
- Sal's board needs to be powered with 3.3V (PIC and Wii Camera) and 5V (MAX233)
John's idea
PWM laser, measure difference between received and original signal due to time of flight, low pass filter to get an average... Can be real simple, use high power laser safely (cause they are PWM) and hopefully manufacturable and not too subject to noise.optoNCDT ILR1038-8
http://www.micro-epsilon.com/products/displacement-position-sensors/laser-distance-sensor/optoNCDT_ILR_1030_1031/index.htmlConstruction Laser Range Finder
Try to hack something like this: http://www.amazon.com/Bosch-DLR165K-Distance-Measuring-Device/dp/B000T7LISM -- AlexisLD - 18 May 2010
-- AlexisLD - 18 May 2010 Ideas, requests, problems regarding TWiki? Send feedback