new web: http://bdml.stanford.edu/pmwiki
TWiki > RisePrivate Web>FootDesign? >CompliantSpinedFoot (09 Dec 2005, MarkCutkosky)
RisePrivate Web>FootDesign? >CompliantSpinedFoot (09 Dec 2005, MarkCutkosky)
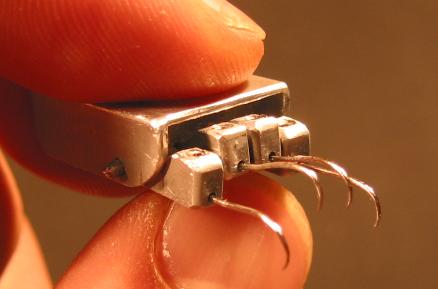
Compliant Spined Foot Development
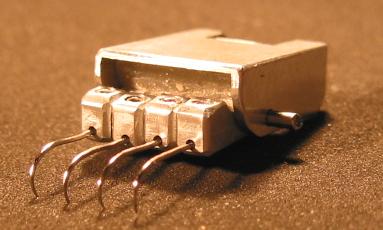
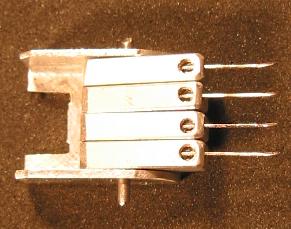
-- MarkCutkosky - 06 May 2004 Key design issues:- Ensure that with N claws you get N times the gripping force from 1 claw
- Try to maximize the reliability so that at least a few claws engage (not just one)

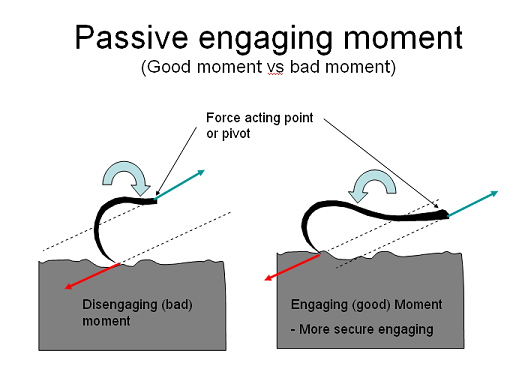
 One presentation slide from Sangbae's Adhesion model presentation file shows moment analysis in spine design.Sticky system model presentation file
One presentation slide from Sangbae's Adhesion model presentation file shows moment analysis in spine design.Sticky system model presentation file
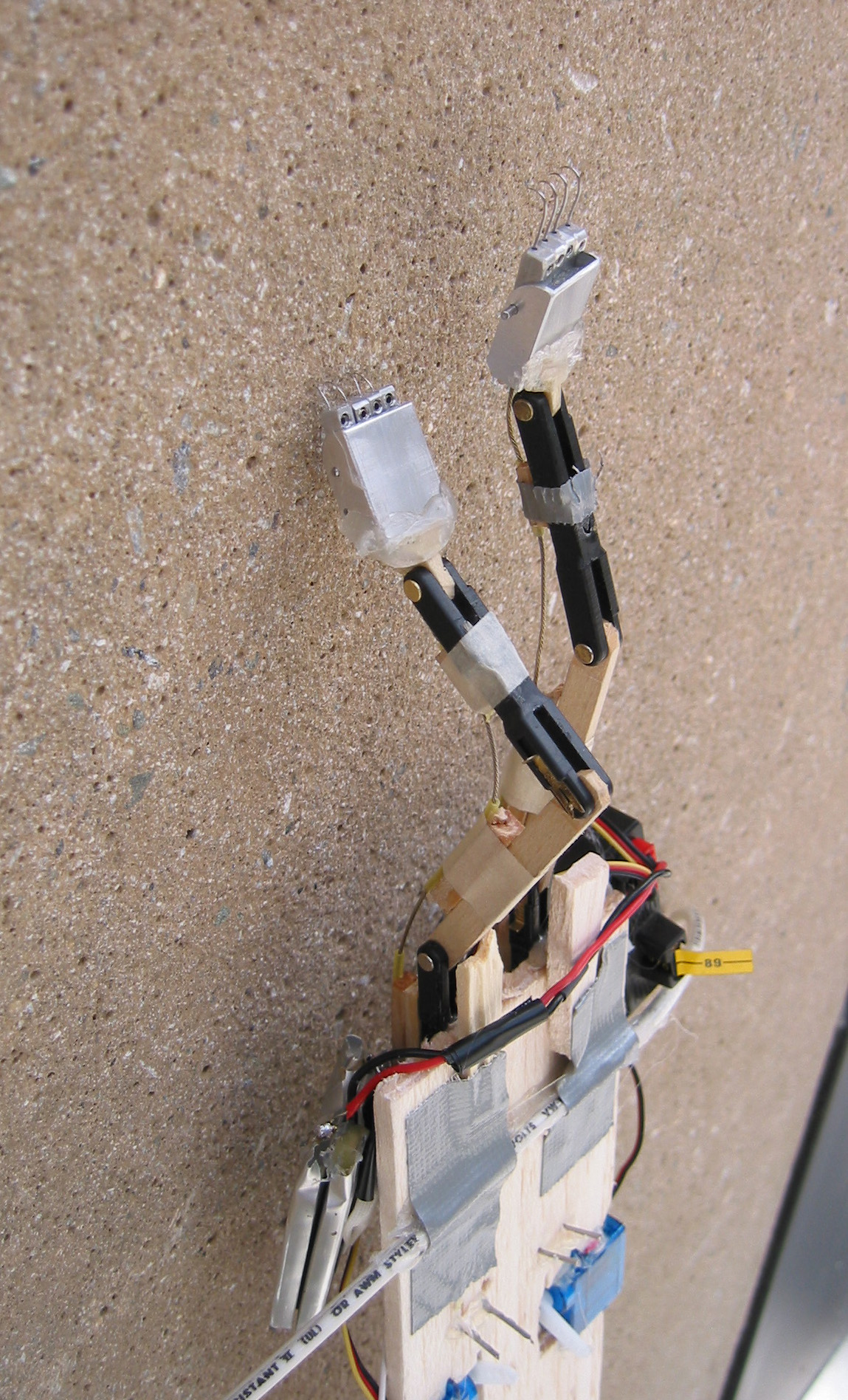
(Click on attachments below to download high-resolution versions of these figures + a CAD solid model rendering). Click here for a short MOVIE of the claws and climber in action. The key message from the video is that strategy and behavior are all-important! Many minor design modifications can be made to the climber. For example, the legs really need 2 DOF so that they do not produce pitching moments when detaching and repositioning. Some quick numbers:
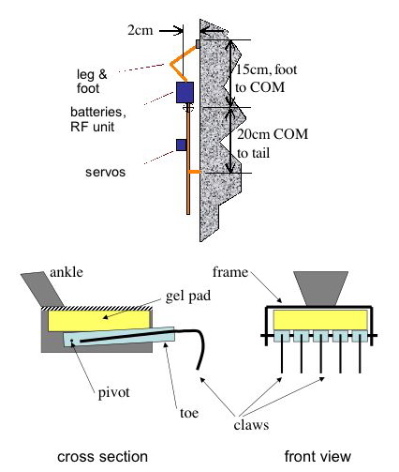
- Weight of the RC climber = 0.1 Kg including 2 RC servos, receiver and lithium polymer batteries
- Distance from wall out to center of mass (COM) = 0.02m (see sketch above)
- So, best-case (minimum) pitch-back moment = 0.02Nm
- Maximum distance from foot to COM = 0.15m
- Distance from COM to tail = 0.2m
- Minimum tensile (adhesion) force per foot in static conditions = 0.08N
 , so 0.1 atm would be plenty for just sticking. But this is the best case. Also, the trick is to reliably get 0.1atm over a significant foot area.
, so 0.1 atm would be plenty for just sticking. But this is the best case. Also, the trick is to reliably get 0.1atm over a significant foot area.
- 5-6-04email.rtf: email to RiSE? PIs and Biomimetics May 6, 2004
Ideas, requests, problems regarding TWiki? Send feedback