new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > StickyBot > StickyBotMechanical>TwoToeFoot (27 Jun 2007, BarrettHeyneman)
Rise Web>ClimbingRobot > StickyBot > StickyBotMechanical>TwoToeFoot (27 Jun 2007, BarrettHeyneman)
Two Toed StickyBot Foot
This foot was originally designed at the beginning of summer '07 to incorporate a few possible improvements to StickyBot's feet. In the last few months we've observed:- The outer two toes on the feet (even the less splayed 90 deg feet) make virtually no contribution to adhesion; very little contact and not in the preferred direction when they do make contact.
- The palm is coated with soft polymer (20A urethane), so if it comes in contact with the glass it generates some friction and hinders the stalks bending into the loaded state. Currently StickyBot climbs with the toes slightly over-extended, towards the wall, so that as the foot comes into contact the toes are sure to make contact before the palm.
- When the toe differential system is rigidly attached to the forearm, the cables running from the differential to the toes effectively rigidly attach the foot to the forearm, locking the compliant ankle.
- Because the end of the forearm rotates relative to the climbing surface as it moves in and out (due to the wing action), the outer toes are pressed in harder during the normal loading phase, but the inner toes have better contact during the stroke. A more compliant ankle would help this.
- When I put together a demo foot for Greg Moore, it wouldn't hang from the wall on its own. It helped to add a spur, a miniature tail coming off of the palm, to provide pitch compensation. It also helped to add weight to the spur, close to the wall.
- Removes the outer toes and elongates the inner toes.
- Adds to spurs off of the back of the palm (opposite the toes) to both help with alignment as the foot contacts the wall and provide some local pitch compensation to the foot.
- Elevates the palm so that only the spurs and the toes will contact the wall.
- Attaches the differential to the foot and routes the single control cable through the ankle, much closer to the point of rotation.
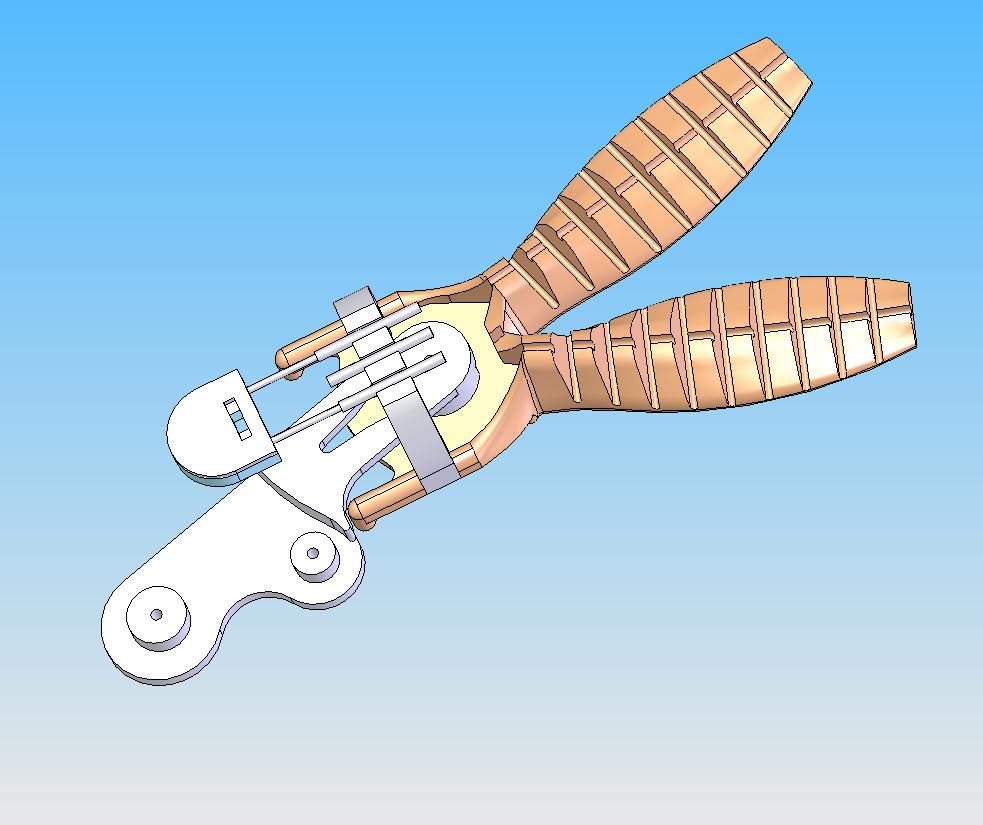
First Design
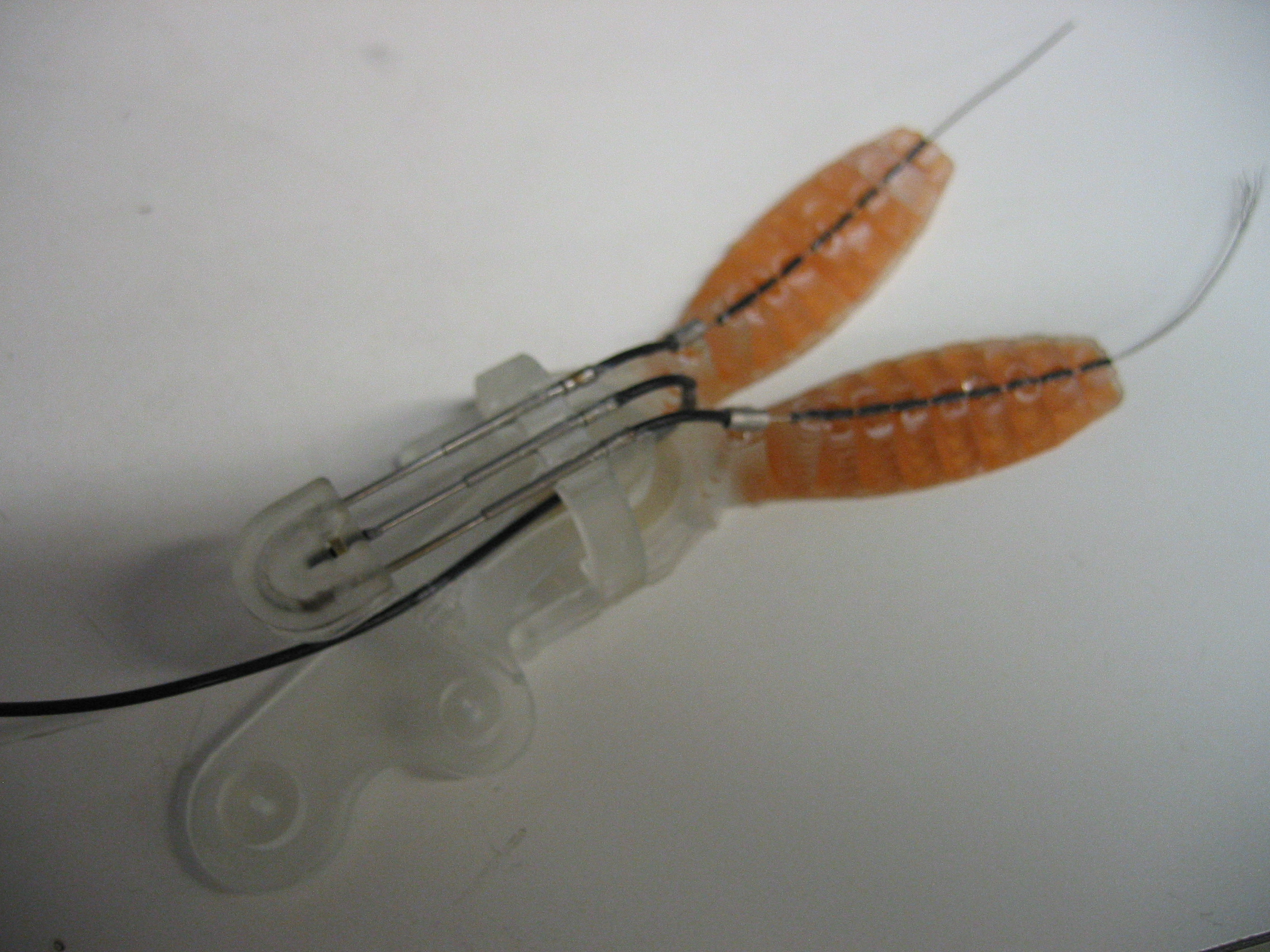
This is the SolidWorks model of the foot.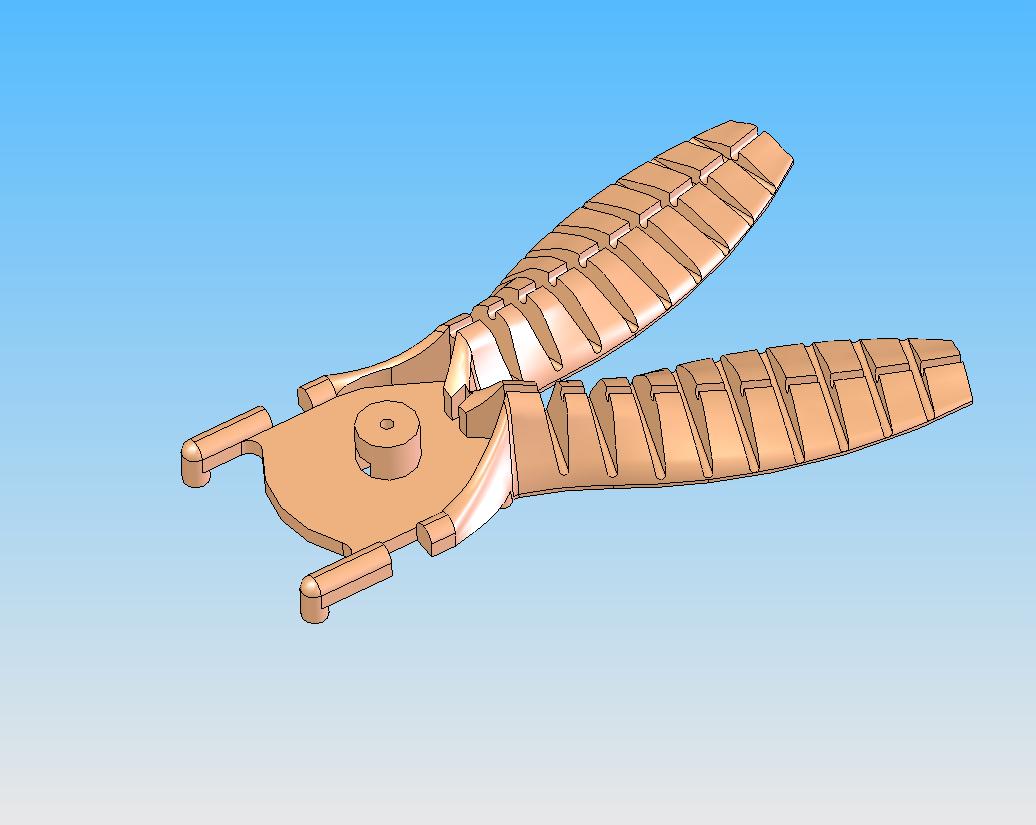 The elevated palm required a redesign of the forearm as well, to keep the foot from being further offset from the body when it's parallel to the climbing surface. The whole assembly in SolidWorks and fabricated is below.
The elevated palm required a redesign of the forearm as well, to keep the foot from being further offset from the body when it's parallel to the climbing surface. The whole assembly in SolidWorks and fabricated is below.
Observations
The ankle is definitely softer, which is primarily what I wanted to gain from this design. However, it still isn't as soft as I'd like it. For the next version I need to:- Think through the cable guide system and redo the grooves slots for the hollow needles.
- Change the angle of the differential to minimize the amount of curve in the input cable guide, thereby minimizing friction.
- Use a smaller tool and/or smaller cut depths to get better feature resolution on the toe segment cable guide grooves.
- Make the ankle compliance softer; thinner or spokes.
- Fix the extra clearance between the forearm and the palm; I think I may have messed up the cuts, not the actual part.
Ideas, requests, problems regarding TWiki? Send feedback