new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>TWikiUsers > LaurelFullerton>StickyToes (01 Aug 2008, LaurelFullerton)
Rise Web>TWikiUsers > LaurelFullerton>StickyToes (01 Aug 2008, LaurelFullerton)
Sticky Toes
With large patches of adhesive, it is difficult to maintain alignment of the entire patch. When the patch is misaligned relative to the surface, the stalks/wedges do not come into close contact with the surface and adhesion cannot occur. Additionally, any sort or moment at the adhesion surface causes the adhesive patch to peel off. Sticky Toes are intended to alleviate the problems outlined above. Rather that using one large patch, Sticky Toes use many small patches that individually conform to the surface. This should provide the adhesion force of a large patch without the difficulty of aligning a large area.Track Design
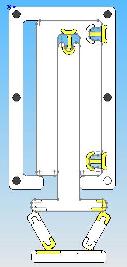
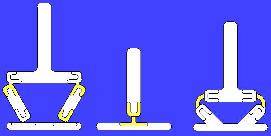
Four-Bar Linkage Design
Future Work
The geometry of the original four-bar linkage will be revised so that the instantaneous center of rotation is located exactly at the adhesive patch. Ideally, the center of rotation will travel down the length of the patch as the top bar moves. Also, the four-bar mechanism is likely to be loaded from the side rather than the top (based on how the robot leg attaches to current adhesive patches). The geometry of the mechanism should be revised to take this into consideration. -- LaurelFullerton - 01 Aug 2008Ideas, requests, problems regarding TWiki? Send feedback