new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>SprawlTurning>SprawlTurnAnalysisApproaches (13 Aug 2003, AMcClung? )
Rise Web>SprawlTurning>SprawlTurnAnalysisApproaches (13 Aug 2003, AMcClung? )
Sprawl Turning - Analysis Approaches
There are various ways to approach the idea of turning in the Sprawlette robots. Some approaches assume that the goal is to achieve a stable turn at a fixed rate, while other approaches rely more on body dynamics to cleverly maneuver the body for short transient periods that may not be stable.Ways to think of turning
Moment sum about COM (YAW)The turning moment about the COM can be calculated using information on the leg placement (approximate from leg angle), time of contact (approximate from duty cycle) and force (approximate from duty cycle and input pressure). In a horizontal (frontal) plane model, this can be used to predict heading changes, represented by yaw changes. This model assumes relatively stable rolling and pitching changes (less than ?5°). This approach can be expanded to also include 3D YPR dynamics, which can become a very complex problem. Using this frame of analysis, the application to the Sprawlettes involves changing leg angles and duty cycles for various legs. These changes will affect the net moment per stride about the COM, result in turns.
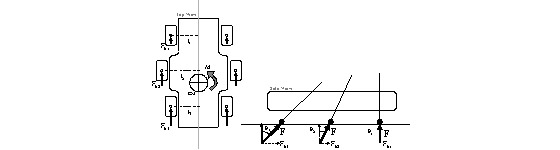 Horizontal plane model. The leg placement along with force approximations and durations can be used to calculate the turning moment.
Horizontal plane model. The leg placement along with force approximations and durations can be used to calculate the turning moment. CONS: Roll/pitch may be substantial enough to affect model. Force and time estimates may be rough (have to do these independently). May need to include friction model. Body roll (4 tilt states, 3 level states) (ROLL)
Turning predictions can be approached from a body roll perspective. This becomes a transverse plane model (normal to the forward motion). In this model, a horizontal body is assumed for straight ahead, normal running, and any body roll causes turning. There are four non-horizontal cases, which produce turns, and 3 horizontal states that change performance. The body can be thought of as having one DOF at each side, which controls the height of that side. In standard running, the body maintains a height that is somewhere between the max and min, and allows for vertical COM undulation. At the max and min heights, there would be no motion, unless leg sweeping during extension or retraction is considered. The three horizontal states are HI (both sides near max), nominal (standard running) and LOW (both sides near min). Both HI and LOW heights result in sub-optimal straight ahead running. The four roll states can be grouped into 2 sets that define which direction the body will turn. Altering the height on the right side can generate a right turn. A height increase (current leg-angles based turn strategy) causes turning that resembles turning about a fixed peg leg for bipeds. Other height increase strategies (such as DC increase) should cause the same effect, only to a lesser degree. A height decrease (current DC-based turn strategy) causes the less forward motion on the right, and the left side turns the body. Other height decreases (changing LA) should produce the same result, as the legs drag more. A similar effect occurs on the left side for the two remaining height change cases.
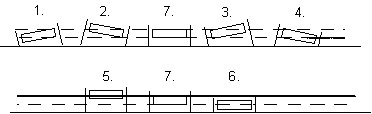 Transverse plane model. Nominal body roll state is 7. Body states 5 and 6 are suboptimal for standard running, but may be acceptable for certain terrain conditions. Body state pairs 1&2, and 3&4 can produce turns to the left and right, respectively. NOTE: View is from rear.
Transverse plane model. Nominal body roll state is 7. Body states 5 and 6 are suboptimal for standard running, but may be acceptable for certain terrain conditions. Body state pairs 1&2, and 3&4 can produce turns to the left and right, respectively. NOTE: View is from rear.CONS: Roll positions may not have surjective mapping to turning (ie. one position may produce different turns based on LA, DC). Most roll data is from simulation (valid enough for turning studies?). Have to develop model of roll (may be difficult to measure on actual robot because of fast semi-chaotic dynamics). Different speeds for each side (~PITCH)
The turning effects can also be interpreted from the point of view of ipsilateral leg speed. Jonathan Clark has performed experiments that correlate leg angle settings (via intersection points and sprawl angles) to speed. To achieve a turn, one could set the legs on one side of the body to achieve one speed, then set the leg angles on the other side to a different speed, thus resulting in a turn at some speed between the settings for the two sides. This approach is loosely related to the body pitch, which can also be used to predict the speed of the robots. By setting the body to pitch at different levels on separate sides, the speed of each side of the body can be selected, resulting in turns for non-equal settings. In practice, any pitch (ipsilateral) changes also result in roll angle changes.
 Sagittal plane model. Body pitch 1 is used in normal running. Body pitches 2 and 3 can be used to speed and slow the body to a certain degree. When pitch speed control is only executed on one body side, turning can be induced. NOTE: Left is forward direction of travel.
Sagittal plane model. Body pitch 1 is used in normal running. Body pitches 2 and 3 can be used to speed and slow the body to a certain degree. When pitch speed control is only executed on one body side, turning can be induced. NOTE: Left is forward direction of travel.CONS: Any non-uniform pitching between sides also results in roll. Mostly relies on data from sims (?) since there is no current device to measure pitch (check Hopkins). The three above approaches are all dimensional reductions of the full body dynamics, which can be used to predict some aspects of body the performance under certain conditions. These 3 methods all model some imbalance between left and right tripods and left and right body sides. Any of these models can be extended to include 3D YPR dynamics and have improved reliability. Dynamic vs static planning (use gait/body props to adjust parameters better, ie. consider multiple strides)
The reduced dimensional approaches that are previously mentioned mostly are built from either static configurations (YAW & PITCH) or stable gait conditions (ROLL & PITCH). This may prove to be sufficient, but it should be noted that considering body dynamics may help to improve performance. By examining the natural frequency of the body and subsystems, better control techniques can be implemented to exploit the natural dynamics. (Such as not expending more turning effort than is capable by the body, or actuating at frequencies that defeat the leg dynamics) -- AMcClung? - 06 Aug 2003
Ideas, requests, problems regarding TWiki? Send feedback