new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>SprawlTurning>SprawlTrunExtremeTurning (13 Aug 2003, AMcClung? )
Rise Web>SprawlTurning>SprawlTrunExtremeTurning (13 Aug 2003, AMcClung? )
Extreme turning
Leg as pivot (DC primary, LA secondary)The legs can be used as a pivot point to create turns. This means that the legs will stay on the ground longer, possibly dragging in an effort to slow down one side of the body and act as a point to pivot about. This can be achieved by having the leg actuated for an extended time, or by actuating several legs for a shorter period. In the extended actuation time case, the legs resemble longer legs and prop the body up a disproportionate time, relative to normal running. In the shorter actuation case, the legs come close to being inactive, and just drag on the ground (if this leg is key for support) as the other legs try to move the body. The same effects can be achieved by altering the leg angles. Making the legs more vertical reduces the forward force contribution of one side of the body, and acts as a sliding peg that allows the other side to turn the body. By shifting the leg angles closer to horizontal, the leg axes may exit the friction cones and start to slip. When the legs become very prone to slip, the legs have reduced influence and act more like supports that drag along the ground, similar to the reduced DC approach.
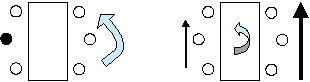 Extreme maneuvers. Turning about a planted leg (left), and using more vertical legs to produce smaller forward propulsive forces on one side.
Extreme maneuvers. Turning about a planted leg (left), and using more vertical legs to produce smaller forward propulsive forces on one side. For the extreme case of turning about the COM of the robot, angular leg reversal may be the most promising technique. By reversing legs on one side of the body to be the opposite of the other side, one side is propelling the body forward, while the other is pushing it back. This will create a spin that will occur close to the COM, depending on the leg placement. For extreme maneuvers, this may not be an achievable configuration within one stride period due to actuator dynamics. If this is the case, helpful transient sequences may be necessary to start the turn while the legs rotate to the proper position. (This has been demonstrated with the "ripple" (circular) gait, which can be adjusted stride to stride via DC changes. This gait causes a moderate turn within one stride, but does not result in a stable (period 1) turning gait. This gait can be used for one stride period, while legs shift to new positions, allowing for a "quick start" to turning.)
 Leg reversal. Legs on one side can be rotated to a reverse position to turn the body about a point near the COM.
Leg reversal. Legs on one side can be rotated to a reverse position to turn the body about a point near the COM. The yaw-pitch-roll dynamics of the body can be exploited, so that extreme maneuvers can be achieved through well-timed actuation. This as been demonstrated by the "ripple" gait and should be further examined in the future.
 Alternate gaits. One example of an alternate gait is the "ripple" gait uses follow the leader leg activation in either a CW or CCW direction around the body. This can create significant heading change with one stride period.
Alternate gaits. One example of an alternate gait is the "ripple" gait uses follow the leader leg activation in either a CW or CCW direction around the body. This can create significant heading change with one stride period. Ideas, requests, problems regarding TWiki? Send feedback