new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>TWikiUsers > VirgilioMattoli>LegConditioningPlatform (31 Aug 2004, YongLaePark)
Rise Web>TWikiUsers > VirgilioMattoli>LegConditioningPlatform (31 Aug 2004, YongLaePark)
-- VirgilioMattoli? - 25 Aug 2004
Conditioning Platform for RISE Legs Testing
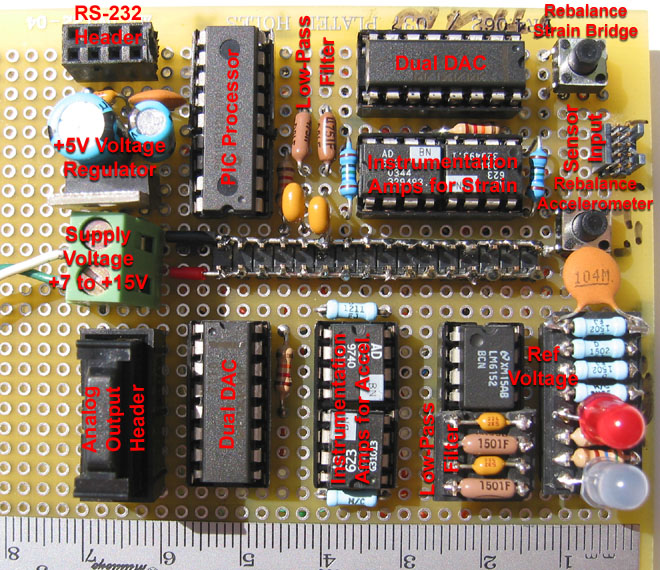
Will and I have realised a preliminary platform for testing of sensorized leg of RISE robot. The platform allow the conditioning of 2 half-bridge configuration strain gauge and one 2-axis accelerometer. The signal outcome from the half-bridge strain gauge is amplified about 640 time previous automatic offset compensation (by a dedicated push button). The outcome signal is referred to 2,5V . Same for accelerometer signals: in this case the amplification is about 5 time. The auto-offset compensation is performed by a PIC18F1320? microcontroller.- Picture of Electronics Board:
Ideas, requests, problems regarding TWiki? Send feedback