new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ArachiSimulation > ParametricContactModeling>ContactFrame (12 Oct 2005, MarkCutkosky)
Rise Web>ClimbingRobot > ArachiSimulation > ParametricContactModeling>ContactFrame (12 Oct 2005, MarkCutkosky)
-- DanielSantos? - 25 Aug 2004
Contact Frame
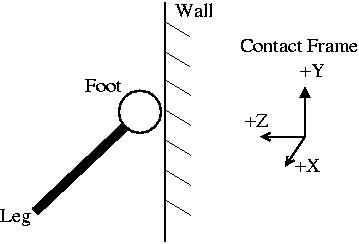
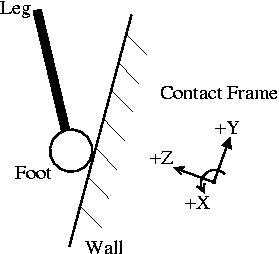
This page contains a description of the Contact Frame. For the purposes of the PCM, it is useful to define a standard reference frame in which to describe the contact forces. This frame description will make it easier to discuss and think about issues such as adhesion, shear, contact angles, attack angles, etc.. The Contact Frame is defined as follows:- +Z - The Z axis should be aligned with the contact normal. It should point from Object B towards Object A. In this sense, when a foot makes contact with a wall, the positive Z axis points directly out of the plane of the wall.
- +X - The X axis should be perpendicular to the plane formed by the Z axis and the Gravity vector. Specifically, the positive X axis should be formed by taking the cross product of the positive Z axis with the Gravity vector - Z x G. In this sense, when a foot makes contact with a wall, the positive Z axis points laterally to the right, along the plane of the wall, if you are standing behind the climbing robot.
- +Y - The Y axis should then be formed using the right-hand-rule and the X and Z axes. Specifically, the positive Y axis should be formed by taking the cross product of the positive Z axis with the positive X axis - Z x X. In this sense, when a foot makes contact with a wall, the positive Y axis points in the climbing direction, parallel to the wall.
| Configuration 1 | Configuration 2 |
|---|---|
 |
 |
Ideas, requests, problems regarding TWiki? Send feedback