new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>TWikiUsers > JonathanKarpick>ClimbingTrajectories (08 Mar 2008, JonathanKarpick)
Rise Web>TWikiUsers > JonathanKarpick>ClimbingTrajectories (08 Mar 2008, JonathanKarpick)
-- JonathanKarpick - 08 Mar 2008
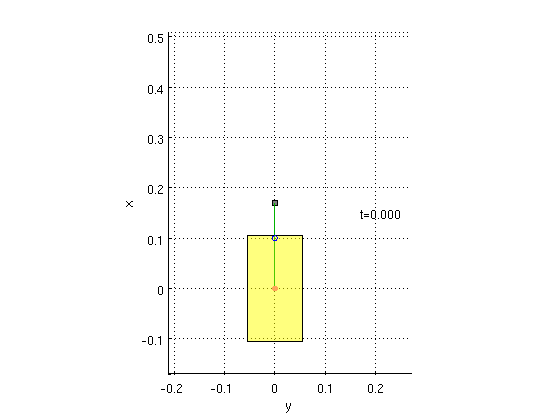
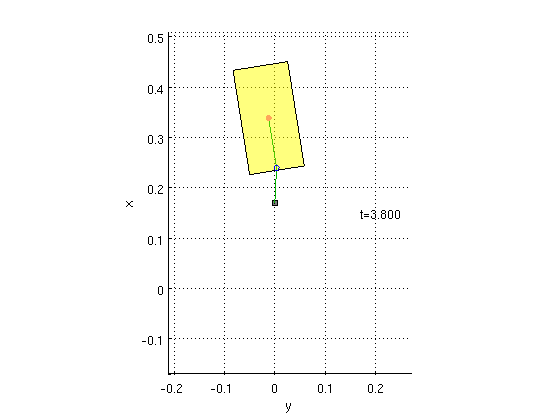
Non-collocated control of a potential climbing robot. (Really, an "Acrobot"). There is an actuator at the hip, but not at the ankle. I've used non-collocated partial feedback linearization, and commanded the leg to the vertical position (ankle angle = 0 in my coords).
The video (at 1/4 speed):
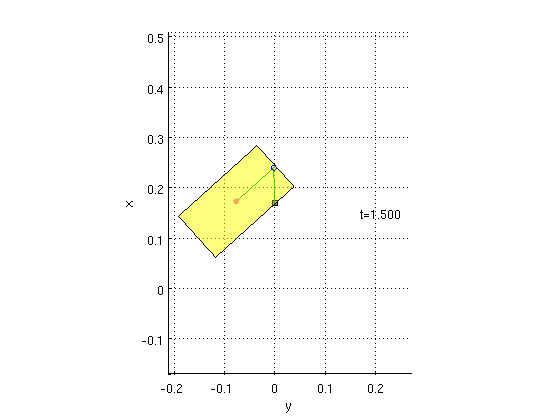 IC -> Middle point -> Desired (but it continues to fall from there...)
IC -> Middle point -> Desired (but it continues to fall from there...)
 ->
->
->
->
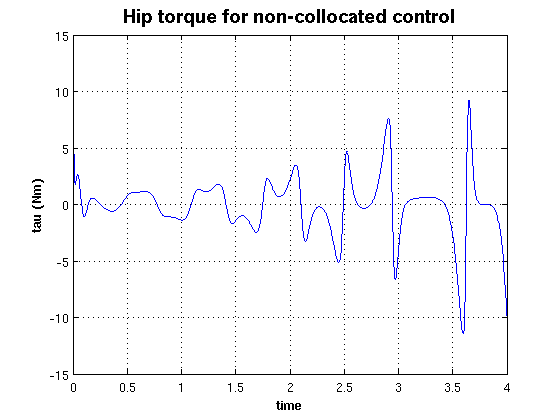
 The hip torques:
The hip torques:
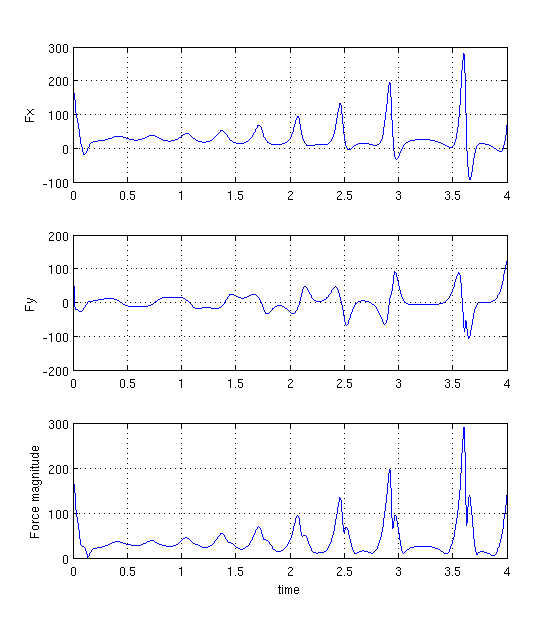
 The wall reaction forces (if only I could limit the peaks...):
The wall reaction forces (if only I could limit the peaks...):
IC -> Middle point -> Desired (but it continues to fall from there...) ->
->
The hip torques:
The wall reaction forces (if only I could limit the peaks...):
Ideas, requests, problems regarding TWiki? Send feedback