new web: http://bdml.stanford.edu/pmwiki
TWiki > Main Web>TWikiUsers > VioletaCrow>VioletaSummerProject (07 Jul 2011, VioletaCrow)
Main Web>TWikiUsers > VioletaCrow>VioletaSummerProject (07 Jul 2011, VioletaCrow)
Violeta Crow Summer Projects
June 6, 2011: Getting Started
- Registered on wiki, looking at possible projects including WetAdhesion
- Observed Kim work and took notes on the procedure:
- Materials needed: Cup scale, ziploc bag (to dispose of materials), wooden stick, paper towels, gloves, duct tape, and "smooth-on" (arts and crafts material - useful because it's well documented)
- Mold was made with acrylic using the laser cutter. (Laser engraver uses pdf, corel, or .dxf files)
- Procedure:
- Place cup on scale. Shake squeeze bottle containing dark brown liquid and pour 10grams.
- Pour 10grams of clear liquid (This particular pour is equal parts).
- Mix with the stick for a few minutes.
- To pour under vacuum:
- Attach cup to rod using duct tape. Position carefully over mold.
- Close lid and run vacuum. Wait until bubbles in material start collapsing and then pour.
- Remove mold from vacuum and use stick to remove excess material from the top.
- Leave on the back of the fume hood for 24 hours.
- Started SolidWorks Tutorials on creating parts and assemblies.
June 7, 2011: Tutorials and Research
- Administrative tasks
- Solidworks and Twiki tutorials
- Discussed design of structures for applying loads to wet adhesive pads with Kim
- Desirable characteristics of design:
- Load should be close to the surface being climbed to prevent the moment from peeling the pad off the surface.
- Allow for several degrees of freedom to let robot make adjustments in position without disturbing adherence.
- Allow for some scalability (addition of pads horizontally or vertically)
- Avoid "twisting" moments.
- Issues with current design:
- Load pulls from bottom rather than from adhesion point.
- Not all four pads come into contact with the surface at the same time.
- String that holds structure together moves around too much and gets on the way.
- Rationale for adhesive pad design:
- Narrow base - allows for some movement without disturbing adherence.
- Diamond-shaped structure from pad to base acts like a spring - stretches as necessary to hold load.
- Design for dry adhesion:
- String between two pads - doesn't transfer moment of any non-vertical movement. (Need to ask Elliot for a more detailed explanation).
- Desirable characteristics of design:
- Research on frogs:
- Fingers on the outside of the hand are longer than those in the inside. (Unsure if this helps with adhesion)
- Toes are significantly longer than fingers - probably for jumping/swimming.
- Fingers are spaced out forming an arch (rather than being aligned vertically)
- Pads don't work well when they are excessively wet
June 8, 2011: Ankle Design Background
- Administrative tasks.
- Safety Training - Important lessons:
- Toasters are the most common cause of fires at Stanford (so clean your toaster often!)
- Electrical tape is not an adequate repair for cables.
- Running cords under doors or carpets is illegal.
- Helped unpack the new stage and got an overview of how to work with it.
- Discussed "tendon-inspired" ankle design for dry adhesion with Elliot and Kim:
- Rectangular layer with two square patches of adhesive. Vertical opening from the center to the bottom allows the string (riser tendon) to apply the force at the center of the adhesion area.
- Design of structure in the back allows for movement to happen without disrupting adhesion.
- Issue with old design: Foot was too rigid in the vertical direction. Force needed to be counterbalanced at the bottom of the robot.
- Main difference with wet-adhesion system is that adhesive pads are several small circles instead of two large squares, and that the current design does not have a rigid backing.
- Suggestions for wet adhesion: Glue rigid backing to pad while it's adhered to a surface to prevent it from enhancing irregularities in the material.
June 9, 2011: Ankle Design
- Possible design for wet adhesive:
- Constraint: Do not interfere with current design by providing some form of rigid backing.
- Solution:
- Hollow rectangular frame instead of complete layer.
- Inverse-Y shape in the middle to provide support and guide the string.
- Bottom arms of Y attached to the back of the frame to avoid interfering with the adhesive structure.
- Section of the frame between the arms of the Y is removed to allow the string to pass at an angle.
- Adhesive may be attached to frame at a slight forward angle to increase the possibility of coming in contact with the surface.
- Horizontal, hollow half-cylinder attached to the frame behind the area of adhesion. The round section of this structure rests on a piece of similar shape but perpendicular to it. This allows for freedom of movement in all directions without disturbing adhesion.
- Meeting with Kim and Prof. Cutkosky:
- Discussed several ideas to improve wet adhesive. (For now, notes on this ideas will not be posted here).
- Flat backing should be explored: Attach during or after manufacturing.
- Discussion of new ankle design:
- Can use same design as for dry adhesion - one solid layer with all pads glued onto it.
- Same as described above with individual backing for pads:
- Possible improvement: Attach square backing to each pad and attach backing to frame with string on the top and bottom of the square. This means that the Y-shape in the center does not need to be angled to be attached in the back because it no longer interferes with the base of the adhesive pads.
- Find best kind of glue for urethane pads: washed pads with soap and water and attached to glass surface; accelerated drying process with heat gun. Applied a layer of glue using a toothpick and attached PCBoard. Samples that took 24 hours to cure where secured with a clamp.
Glue type Time to cure Result RTV 108 Transluscent Adhesive 24 hours Did not work Sil-Poxy (Silicone Rubber Adhesive) 12 minutes Did not work Super glue, Tower Hobbies, Thick-CA Build-it - Best so far Gorilla glue 24 hours Bbled up; attached well to urethane but not to PCBoard
- Kim taught me how to use the laser cutter and put together a mold:
- Use CorelDraw to make a design with simple lines
- Load design in computer and convert it to "hairline outline"
- Align material to upper left corner of laser cutter
- Adjust Print Settings:
- Select "Autofocus", and "Vector"
- Specify piece size. (In this case 24 horizontally and 18 vertically).
- Adjust speed values according to material type and thickness (We were using 1/16" acrylic).
- Set paper type to "broad sheet" and "landscape"
- Plug in and turn on laser cutter.
- Print file and flip blue knob labeled "NIBCO" and while switch on the wall behind laser cutter. Press "Go".
- Do not let go of the lid when retrieving pieces.
- To put mold together: hold pieces together and and use straw method to make it go between the pieces. Hold and let it set.
- Cut my own mold using the laser cutter. Put it together with acrylic cement.
June 10, 2011: Short post but tons of notes
- Checked glued adhesives (results recorded above)
- Meeting: Presentation about hand project. (Notes will not be posted here).
- Conversation with John about tests needed on dynamic sensor (more on this next week). The 10 pages of notes I took will not be transcribed here because it would take too long.
- Wet Adhesion Ankle Prototype needs to be completed by Tuesday.
- Finished frame drawing using CorelDraw and will try to use the laser cutter to print it on the PCB (if I can get access to the building).
June 13, 2011: Laser Cutting
- Checked adhesive with Gorilla glue on filed PCB - good result.
- Designed a mold to hold PCB in place directly on top of poured urethane while it cures to see if it attaches properly. (06/14 Update: Best results up to now).
- Urethane poured directly on PCBoard:

- Urethane poured directly on PCBoard:
- Revised frame drawing in CorelDraw to thicken inner borders and include holes to attach pads with string.
- Attempted to make frame on PCB using laser cutter - some sections did not go through and others burned. Metal sections are probably the issue. Will look into purchasing similar material without a circuit printed on it.
- Cut frame on acrylic instead of PCB.
- Attempted to make frame on PCB using laser cutter - some sections did not go through and others burned. Metal sections are probably the issue. Will look into purchasing similar material without a circuit printed on it.
June 14, 2011: Lab Cleanup
There isn't much to report today. Organization is fun! And now I have a new lab notebook - I love taking notes!June 15, 2011: Building Prototypes
- Attached the square pads to the frame using thread.
- Initially tried using nylon but the knots did not hold very long and the pad would rotate around instead of staying parallel to the surface.
- First method used was tying a small thread on each side of the pad. A simple knot on the pad and one on the frame was supposed to keep it in place. This method did not seem reliable because the pad moved around too much and the thread seemed too weak.
- The method use was putting the thread through the pad without tying a knot, connecting the double thread by tying it several times around the hole in the frame, making a double knot at the top, and finally pulling the remaining thread and connecting it to the thread on the other side of the pad. This method provided adequate tension and proved to be more reliable because of the several lines of thread.
- Drilled a hole in the top center of the frame to tie the string. Some things to remember about using the drill press:
- Drill bit must be properly placed in the center. If it has been placed correctly, it will not move sideways.
- Secure material by clamping it down.
- Wear safety glasses.
- To make the hole, move drill in and out to prevent residues from damaging the surface.
- If necessary, use fluid to prevent overheating the material.
- Attached a piece of acrylic vertically in the center of the frame to guide the string closer to the surface of adhesion. Two thin pieces of acrylic were attached to the sides of the first piece to prevent the string from sliding to the side.
- Tested prototype on glass. One pad did not seem to adhere easily, apparently due to the fact that it had not been glued properly.
- Acrylic Prototype for Wet Adhesion Ankle:
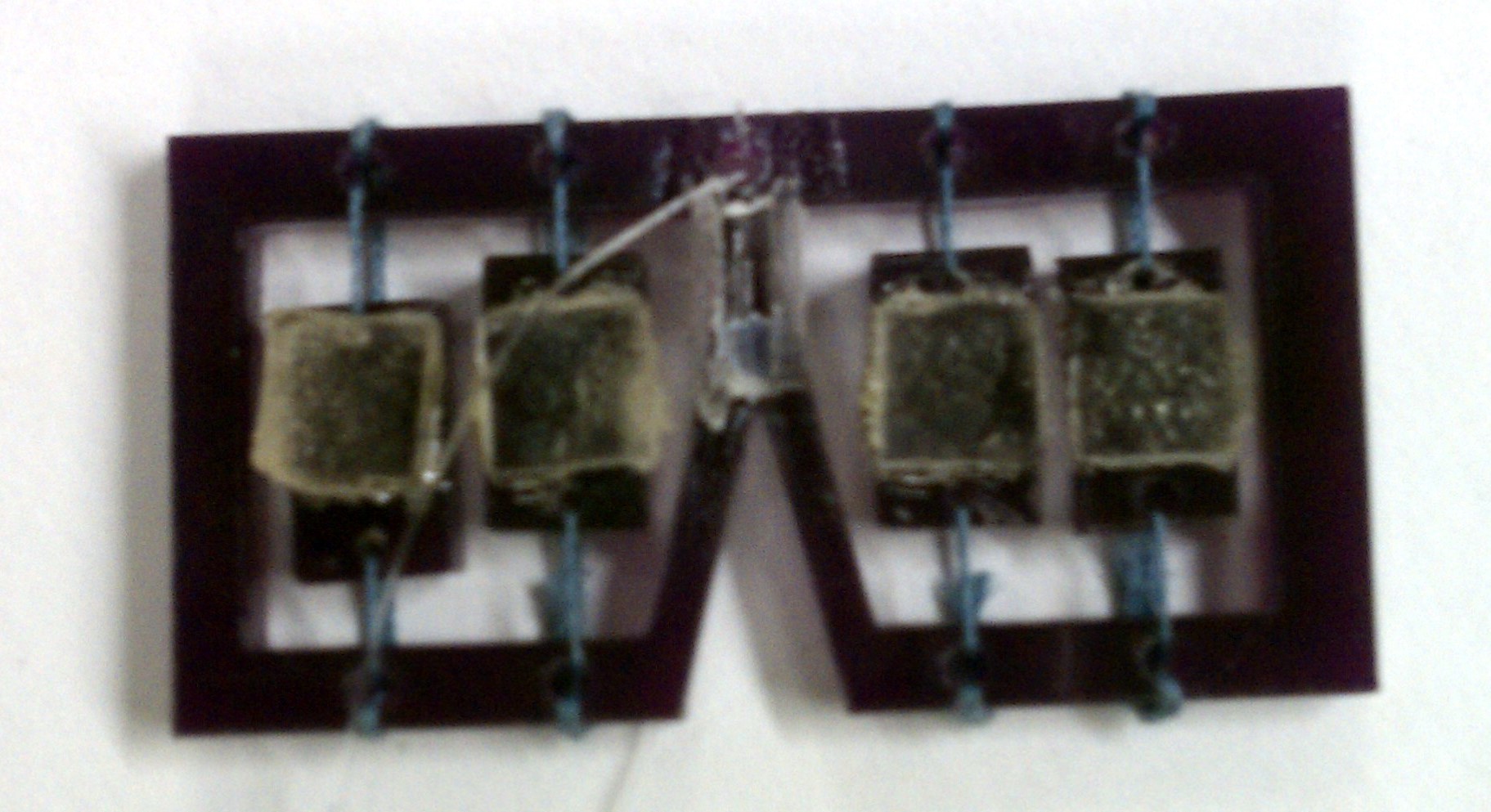
- Acrylic Prototype for Wet Adhesion Ankle:
June 16, 2011: Reading Papers
- Weekly meeting about WetAdhesion was cancelled due to design event (free chocolate!). Kim asked me to explore ElectroOsmosis? as a method to get rid of excess liquid and accelerate setting process. The first task will be to reproduce electro-osmotic pump described in the papers to demonstrate how ElectroOsmosis? works.
- Read several papers on ElectroOsmosis? :
- The electroosmotic droplet switch: countering capillarity with electrokinetics. Michael J Vogel, Peter Ehrhard, Paul H Steen (2005) Proceedings of the National Academy of Sciences of the United States of America 102 (34) p. 11974-9
- Liquid-bridge mediated droplet switch: A tristable capillary system. Anand S. Bhandar, Paul H. Steen (2005) Physics of Fluids 17 (12) p. 127107
- Capillarity-based switchable adhesion. Michael J Vogel, Paul H Steen (2010) Proceedings of the National Academy of Sciences of the United States of America 107 (8) p. 3377-81
- Steen, Paul. "Capillary-surface Stability- Droplet Switches." Cornell University School of Chemical and Biomolecular Engineering. Web. 16 June 2011. <http://www.cheme.cornell.edu/cheme/people/profile/moreinfo/phs7-droplet.cfm>.
- Notes on Electro-osmotic Droplet Switch (EODS):
- Main characteristics:
- No moving (solid) parts.
- Low voltage.
- Fast switching.
- Can be easily scaled down to micron size droplets.
- Positions:
- Down: super-hemispherical shape.
- Up: sub-hemispherical switch.
- Controlled adhesion: Substrate adheres when switch is in down position and releases when in up position.
- Different from WetAdhesion: Controlled adhesion uses the liquid to hold on to the substrate and leaves a residue, while wet adhesion involves eliminating the liquid to let the adhesive set.
- Main characteristics:
- Notes on Capillarity-based switchable adhesion:
- Inspired on leaf beetle.
- 2 main concepts:
- Surface tension from many small liquid bridges (capillarity-based adhesion).
- Contacts can be quickly made/broken with electronic control (switchable).
- Low voltage pulse drives electro-osmotic flow.
- Minimal energy consumption - grab and release states are stable equilibria.
June 17, 2011: More on ElectroOsmosis
- Lab meeting: Discussion on retreat date (June 23rd) and presentation schedule - Kim and I are presenting on July 29th.
- Drew model to build electro-osmotic pump described in Prof. Vogel's paper.
- Some questions about the design:
- Why are there two plastic layers to hold the disk? Is one enough?
- Does the quantity of liquid matter?
- What are the dimensions?
- As seen in the picture below, the materials needed are:
- Glass frit (50mm diameter) - Piece ordered: Chemglass Filter Disc Fritted 50MM F CG-201-33
- Copper electrodes
- Syringes
- Delrin

- Some questions about the design:
- Brainstormed ideas on how to apply electro-osmosis to current WetAdhesion design.
- Worked with John to setup myDAQ and figure out if it will be useful for sensor testing.
- Used the Oscilloscope tool in ELVIS software to measure the voltage of a battery. A potentiometer had been soldered to the battery to be able to regulate the voltage and verify the veracity of the reading.
- Made a simple RC circuit with a 82k resistor and 2.2nF capacitor. The resulting frequency is 5.5kHz.
- Tried using basic Bode Plot tool in ELVISms software. The plot showed a decrease in slope of 20dB/step.
- Not useful because it does not produce a stimulus. A separate stimulus, like white noise, has to be produced by the user. We would like to avoid this because we might be producing frequencies that we don't need or the signals may be out of sync.
- Tried using basic Bode Plot tool in ELVISms software. The plot showed a decrease in slope of 20dB/step.
June 20, 2011: Setup of Sensor Testing
- Welcome Summer Students!
- Read myDAQ tutorials while waiting for LabVIEW to install...
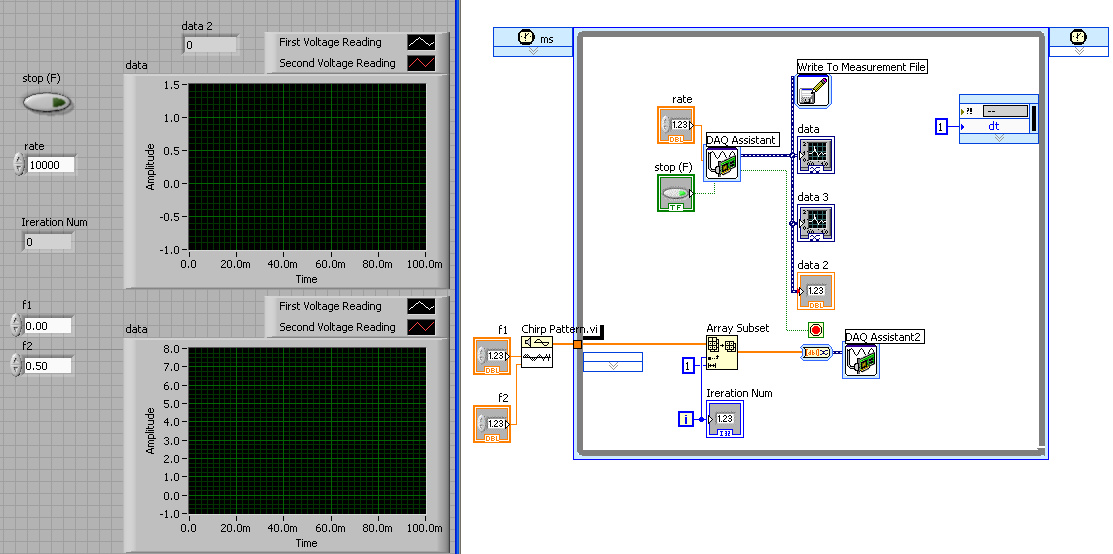
- Created a LabVIEW program that reads two voltage inputs and writes them to a measurement file, and at the same time outputs a Chirp signal.
June 21, 2011: Back to ElectroOsmosis
- Administrative tasks.
- Cut pump design on thick acrylic.
- Acrylic Outer and Center Sections of Electro-osmotic Pump:

- Acrylic Outer and Center Sections of Electro-osmotic Pump:
- Drilled holes in extruding sections to allow the flow of water. The side portion is to attach the syringe and introduce water. The top portion is where the droplets appear.
- To hold fritted disk:
- Substitute by acrylic disk and pour silicone covering part of disc and frame on both sides.
- After drying, it should be easy remove the acrylic disc and put the fritted disc in place.
- Check resistivity of aluminum sheets available in the lab to see if they can substitute copper and be used as electrodes.
June 22, 2011: LabVIEW
- Contacted store to find out thickness of fritted disk:
3.75mm- Thickness of acrylic used for pump:
6mm - Width of channels:
1.7mm
- Thickness of acrylic used for pump:
- Different options for sealing rings:
- Pour silicone onto a flat surfae and cut it into the needed shape
- Buy sealant material at an auto shop
- Buy sealing rings
- Spent the rest of the day trying to get my LabVIEW program to work the way I wanted it to.
- So far, two voltages are read and saved to a file. At the same time, a voltage is produced. The input was checked by connecting the battery with the potentiometer to the breadboard and displaying the voltage read. The output voltage was checked by defining a constant value and checking it with the multimeter.
- Trying to output a Chirp signal made the program crash. Alexis helped me fix the issue by replacing the while loop by a timed loop and using the iteration constant to drive the chirp signal.
- What still needs to be done:
- Figure out correct frequency and period values for each section of the program.
- Saving all the data in the same file.
June 23, 2011: Retreat
Set some goals and milestones and had fun in the sun.June 24, 2011: Improvements to pump
- Lab meeting focused on brainstorming for perching/crawling planes.
- Meeting time has been moved to 1pm starting next week.
- Redesigned central layer of pump to hold disk in place.
- Use two layers instead of one and hold disk in the center.
- Diameter of hole in each acrylic layer has to be smaller than the diameter of the disk.
- Engrave a space for sealing ring in acrylic. Diameter of sealing ring also needs to be smaller than that of the disk.
- Ring size (-032):
- Internal diameter: 47.35±.38mm
- Cross section: 1.78±.08mm
- To engrave using laser cutter:
- Use "raster" instead of "vector".
- Depends on line color. Hairline and black lines are cut as vectors.
- Ring size (-032):
- Fill in remaining space with acrylic or gasket material.
- Cut and engraved two pieces of acrylic.
- Acrylic is thinner than previously used.
- Engraving was done twice, but the channel does not seem deep enough to hold sealing ring in place.
- Worked on LabVIEW program for the rest of the afternoon.
- Experimented with data collection.
- Found an issues with voltage input reading:
- Only one input is saved to file.
- Change in one input affects the other.
June 27, 2011: AutoCAD
- AutoCAD tutorial. Some things to remember:
- Use Constraints to align shapes.
- Ctrl + Shift + scroll = rotate view.
- Extrude options - distance, up to next, all, etc.
- Shape turns from black to blue - fully defined.
- Actions can be reorganized.
- May not work if referencing geometry.
- Download is free for students.
- Completed tutorials: Parts 1, Parts 2, Sketch Constraints, Navigation Tools, Introduction to Direct Manipulation.
- Issues with LabVIEW program:
- Can't read both voltages at the same time.
- Tried separating into two myDAQ Assistants.
- Changing one affects the other.
- Check ground connections.
- Saving to file:
- If using only one myDAQ Assistant, the file saves the same value for both channels.
- Tried saving into two different files, one for each myDAQ Assistant.
- If saving occurs after exiting the loop, only the last value is saved.
- Tried saving inside loop.
- Saving in every iteration either appends header information and data or overwrites the last entry.
- Solution may be to append to file and write a script to parse the text and extract only the data points.
- If using only one myDAQ Assistant, the file saves the same value for both channels.
- Can't read both voltages at the same time.
June 28, 2011: Fixing LabVIEW Program
- Some advice on working with LabVIEW:
- Start by doing tutorials and exercises.
- Get pieces of the program working independently before putting everything together.
- Don't use global variables.
- Ask Dan, he is an expert.
- LabVIEW tutorial on working with data collection:
- Continuous collection is recommended.
- Connect a stop button to the "stop (F)" input, and connect the "stopped" output to the while loop condition.
- Continuous collection is recommended.
- Dan's suggestions:
- Do not go above 10V if the ground is being shared by digital and analog connections.
- Do not use "1 Sample (on demand)", use "Continuous Samples" and let the hardware do the work.
- Find a way to read data into two different vectors
- Save data periodically to prevent memory from filling up
- Use an outer loop
- May not be needed if test is short
- Use DAQmx instead of myDAQ assistant
- Fixed saving to file:
- Created myDAQ assistant selecting input channel a0. Edit settings to add channel a1.
- Used the following settings in the Write to Measurement File window:
- Action -> Save to one file
- If a file already exists -> Rename existing file
- Segment Headers -> One header only
- X Value Columns -> One column only
- Fixed Chirp timing:
- Chirp: Sinusoids swept from start frequency to stop frequency generating energy across a given frequency range. Discrete frequencies depend on:
- Sampling rate
- Start and end frequencies
- Number of samples
- Connected chirp (output signal) to one of the voltage inputs
- Frequency of voltage change increases with time
- When input is at
1kHzchirp takes13.6sto execute, input at10kHztakes2.5s.
- When input is at
- Frequency of voltage change increases with time
- Still need to determine values for f1 and f2 for the signal.
- Chirp: Sinusoids swept from start frequency to stop frequency generating energy across a given frequency range. Discrete frequencies depend on:
- Final LabVIEW Program:
- AutoCAD tutorial on Assemblies.
June 29, 2011:
- Researched Aluminum properties to determine if Copper elctrodes can be replaced by Aluminum electrodes.
Property Copper Aluminum Volume Conductivity at 20°C (IACS) 100% 61.8% Volume Resistivity @ 20°C (ohm-cir mil per foot) 10.371 16.782 Temperature Coefficient of Resistance @ 20°C 0.00393 0.00410 Coefficient of Linear Expansion (per °C) 0.000017 0.000023 Density at 20°C (gm/cubic cm) 8.89 2.703
-
- Concluded that using Aluminum electrodes and increasing the voltage by ~50% will yield the same current as using Copper electrodes.
- Built amplifier on breadboard. (Circuit diagrams will be posted later)
- Checked gain using oscilloscope (Agilent Technologies DSO1014A? Oscilloscope)
- Drove speaker using power supply, Canadian Anthem, and Chirp signal.
- Unable to adjust LabVIEW plots to range needed. Will be using Matlab instead.
- Chirp generation did not work as needed. Resolution is not high enough.
- Meanwhile will be using YouTube? videos of frequency sweep.
- Log sweep is preferred to linear sweep.
- Update: Using NCH tone generator -> Tone -> Sweep(log)
- Meanwhile will be using YouTube? videos of frequency sweep.
- Built 2-stage non-inverting amplifier.
- Protoboard color code:
- Orange: +10V
- Yellow: -10V
- External rails and blue wires: ground
- All other connections: brown
- Protoboard color code:
June 30, 2011: Matlab
- WetAdhesion meeting.
- Progress on backing:
- Rigid backing allows for higher sheer forces.
- Enough degrees of freedom.
- Coplanarity is important.
- Can be pulled away from substrate about 20°.
- Current sample holds up to 450g.
- To make holes on surface:
- Use fishing line or nylon or string when molding.
- Use beeswax to hold it in place.
- Poking holes with a razor after material has cured ruins the surface because the razor displaces material rather than removing it.
- Use fishing line or nylon or string when molding.
- Final shape seems unimportant. May go back to one solid pad, given that packing ensures coplanarity.
- Alternative solutions:
- Suction:
- Inefficient when trying to minimize energy in attachment and detachment.
- Small amount of suction may be useful for pulling excess water.
- Octopus: Suction is distributed and small. Not much energy is used.
- After a couple of hours, suction may play no role in WetAdhesion.
- Suction:
- Tests to perform on sample:
- How long will it stay attached? DryAdhesion? creeps and shifts downward after a certain period of time.
- How many times will it adhere and detach without degrading?
- Measure performance on non-planar surfaces using "frame" ankle design and new backing material.
- Progress on backing:
- Matlab results:
- There are some marked difference between the plot of the chirp and that of the filtered result.
- Filtering may be cutting off low frequencies.
- Sensor chip uses A weighted filter for voice noise filtering. C weighted filter would be better.
- Attempt to remove effects of filtering by applying the inverse of the transfer function to the data. * May lose resolution and introduce error.
- At higher frequencies there is a dip in the graph, probably due to resonance of the system.
- Try using accelerometer embedded on balsa wood to get more data.
- Settings used for current test:
- Start frequency: 50 Hz
- End frequency: 1 kHz
- Start time: 1.67 s
- End time 6.67 s
- Things to fix on Matlab code:
- Label plots and axes.
- Use V/V for units of magnitude of ETFE
- Adjust region to show only relevant data
- Show FFT of region needed. (Second half is a mirror image of the first).
- Eliminate DC component by averaging all values and subtracting it from all data.
- ETFE is the ratio of input to output. Adjust angle plot to start at the origin.
- Convert from radians per second to Hz by dividing by 2pi.
- Ask user to input time and frequency range.
- Use the following command to request user input:
_evalResponse_ = input(prompt)_
- Use the following command to request user input:
- Use
semilogxto make set the x-axis in log and the y-axis linear.
- Label plots and axes.
- There are some marked difference between the plot of the chirp and that of the filtered result.
July 1, 2011: Pump
- Finished Matlab program.
- Finished fixing axis labels and sample range.
- Trick to adjust time index: startIndex = startTime * 10000 + 1. This works because the file is organized as follows:
Index Time stamp 1 0.0000 ... ... 15 0.0014 ... ... - To adjust plot of angle to start at origin:
- Save angle data on variable temp
- Subtract the first value from every data point in the array.
- Trick to adjust time index: startIndex = startTime * 10000 + 1. This works because the file is organized as follows:
- Convert axis to radians in last plot.
- Finished fixing axis labels and sample range.
- Test accelerometer:
- Use the one that does not need to be soldered.
- Advantage: Extremely high frequency and no need to solder.
- Disadvantage: Cables are fragile.
- Attach to large cable, then to charge amplifier and then to power supply.
- Connect to oscilloscope and shake to see signal.
- Need to find 24V power supply to test this.
- Use the one that does not need to be soldered.
- Lab Meeting:
- New Wiki is ready. Sign in as administrator and create a new user.
- Paul's presentation on Novel Uses and environments for bio inspired fibrillar adhesives. (Notes will not be posted here)
- Discussed paper on Grasping.
- Filed edges and drilled holes on Aluminum pieces to serve as electrodes.
- Tried to make sealing rings using Sil-Poxy, but the resulting surfaces are not flat enough to completely block water. Will wait for O-rings to arrive before putting everything together.
July 5, 2011: Final Adjustments to Pump
- Update Wiki and create an account on the new one. Unfortunately, changes were not saved last time I updated this blog.
- From now on, this blog will continue in the new wiki.
- Tried to thread holes on acrylic piece to hold electrodes in place using screws.
- Acrylic snapped due to improper selection of thread size.
- Adjusted design in CorelDraw to make it easier to put together.
- Shipment of o-rings was incorrect and will be delayed again. Tried to make flat sealing rings by letting it cure between two surfaces.
- Rings are not of uniform shape but seem to keep water from going through.
Continue Reading
Ideas, requests, problems regarding TWiki? Send feedback