new web: http://bdml.stanford.edu/pmwiki
TWiki > Main Web>TWikiUsers > JonathanKarpick>RocrSim (05 May 2009, JonathanKarpick)
Main Web>TWikiUsers > JonathanKarpick>RocrSim (05 May 2009, JonathanKarpick)
-- JonathanKarpick - 15 Apr 2009
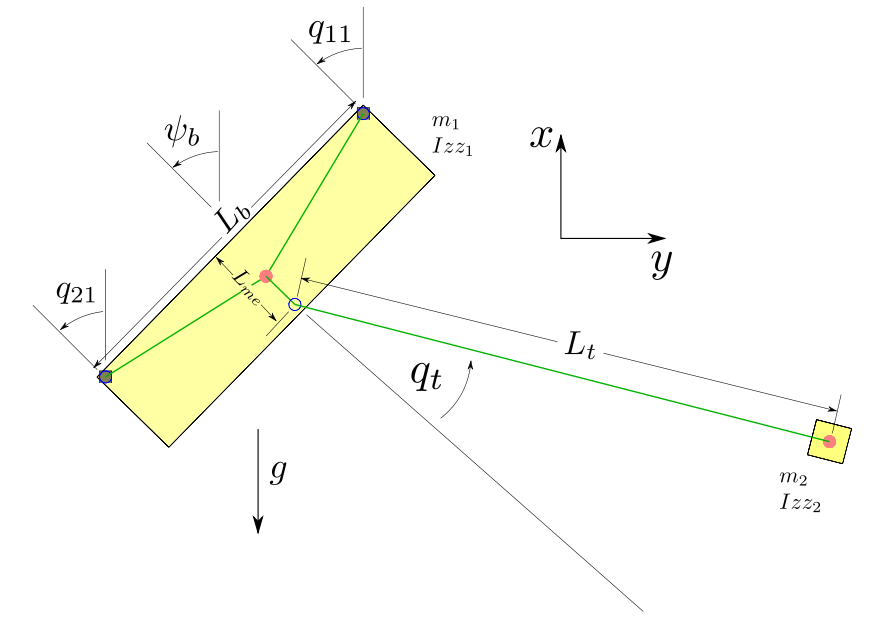
A place to drop some pictures from my simulations of Utah's ROCR robot.
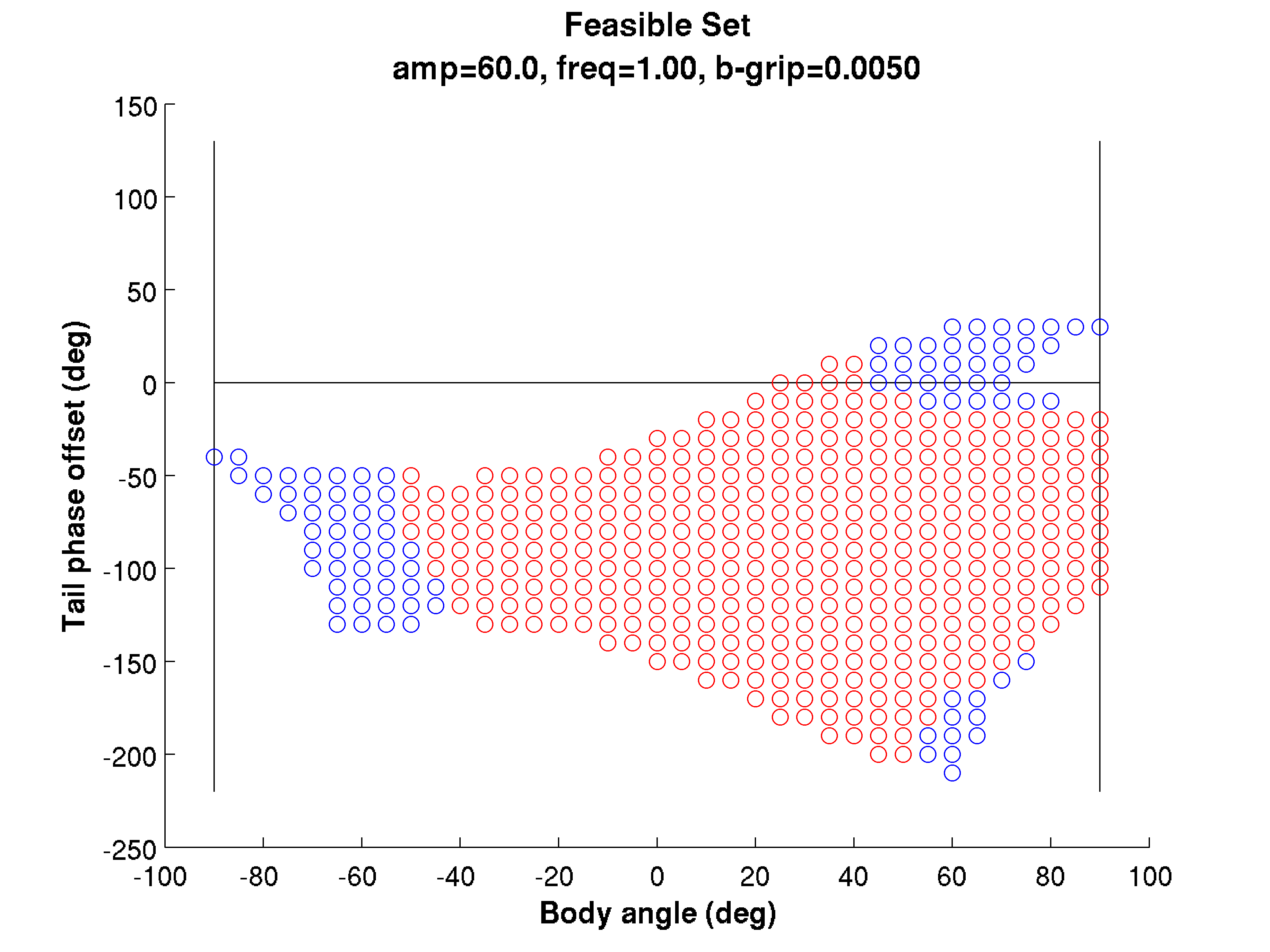
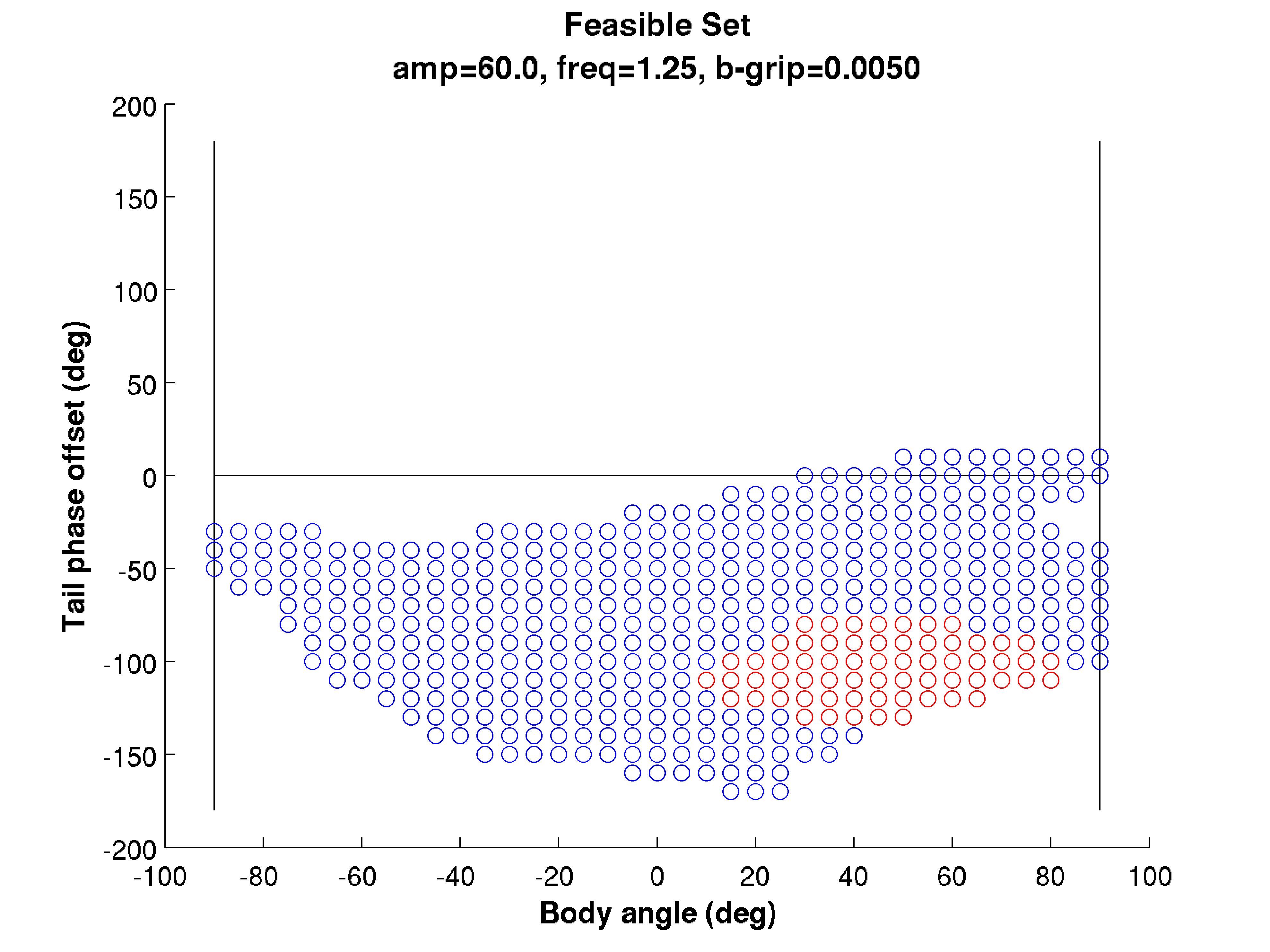
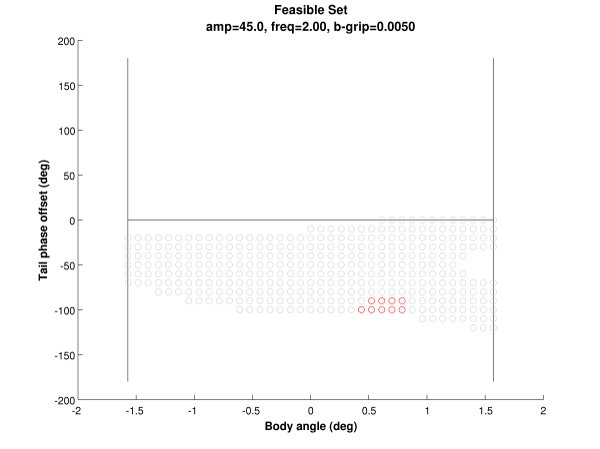
 Feasible sets for ROCR v3 with a tail swing amplitude of 60 deg at frequencies of 0.75 Hz, 1 Hz, and 1.25 Hz. The red circles indicate those initial conditions from which the climber continues to climb after 25 strides. The blue circles represent feasible starting ICs which subsequently fail. Click on an image for higher resolution.
Feasible sets for ROCR v3 with a tail swing amplitude of 60 deg at frequencies of 0.75 Hz, 1 Hz, and 1.25 Hz. The red circles indicate those initial conditions from which the climber continues to climb after 25 strides. The blue circles represent feasible starting ICs which subsequently fail. Click on an image for higher resolution.
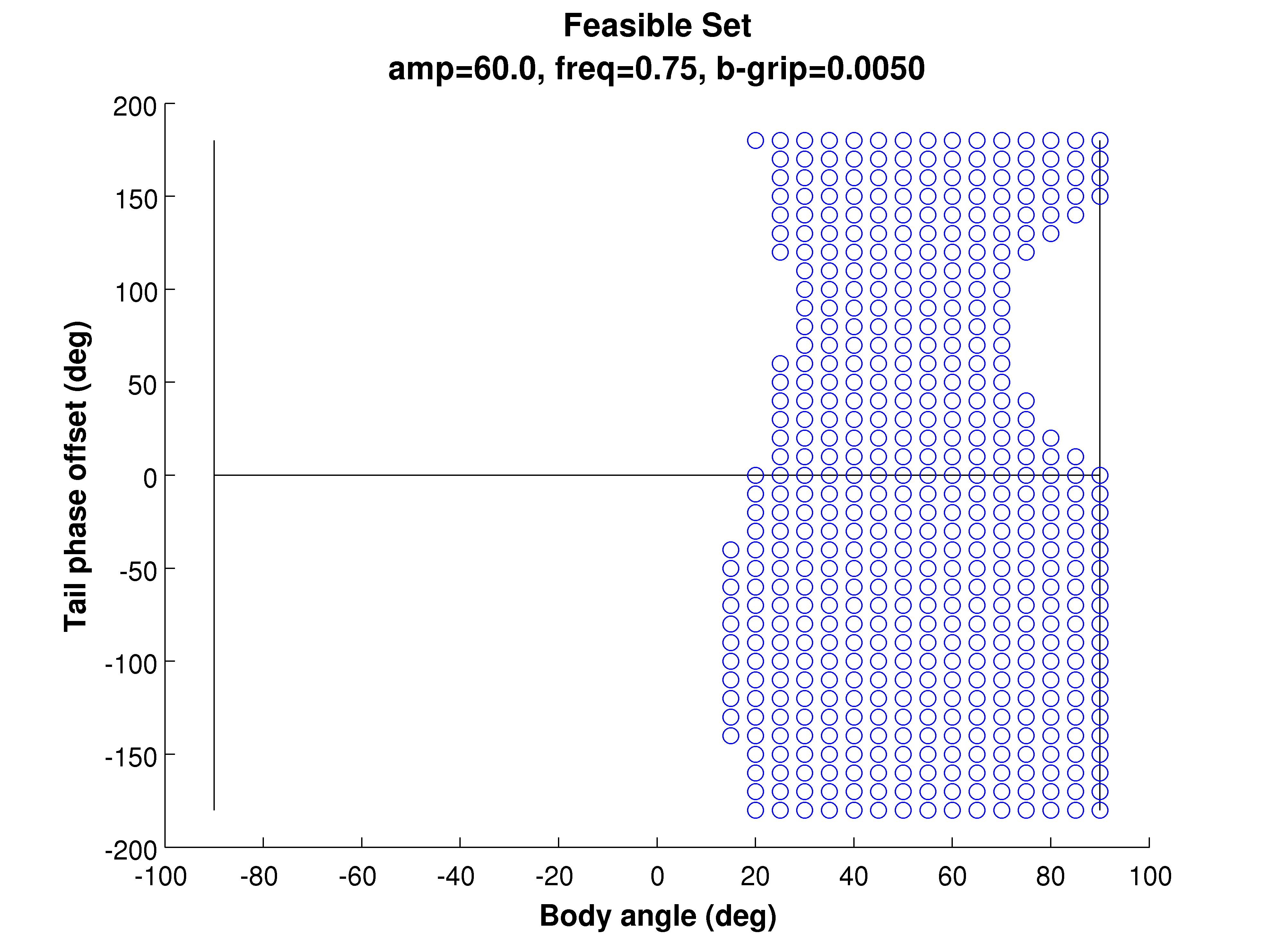
 The feasible set for 0.75Hz is empty. For initial conditions which are actually permissible in the right-foot only state, ROCR mostly stays in place w/ both feet attached, with quick bounces into the right foot only state.
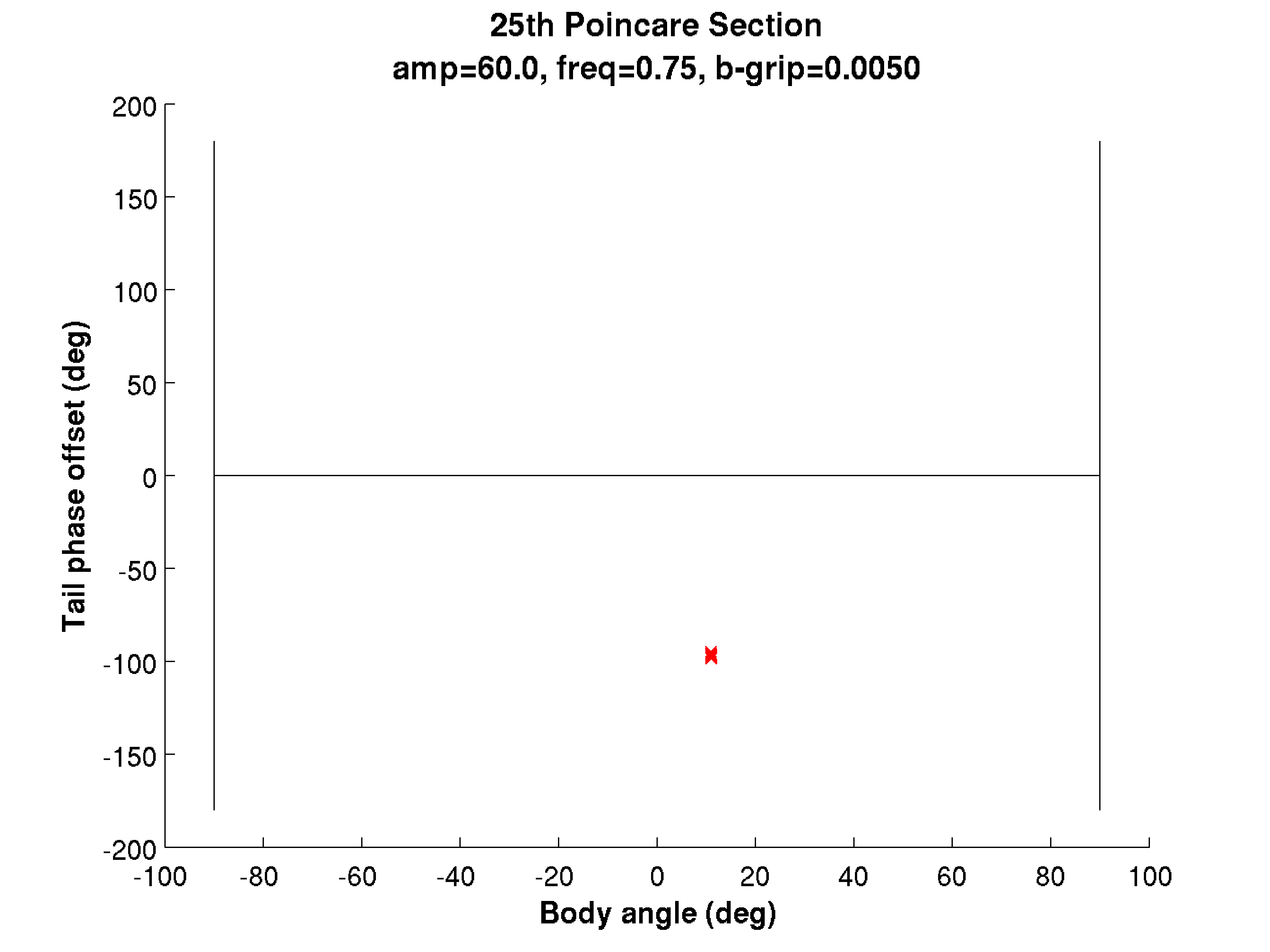
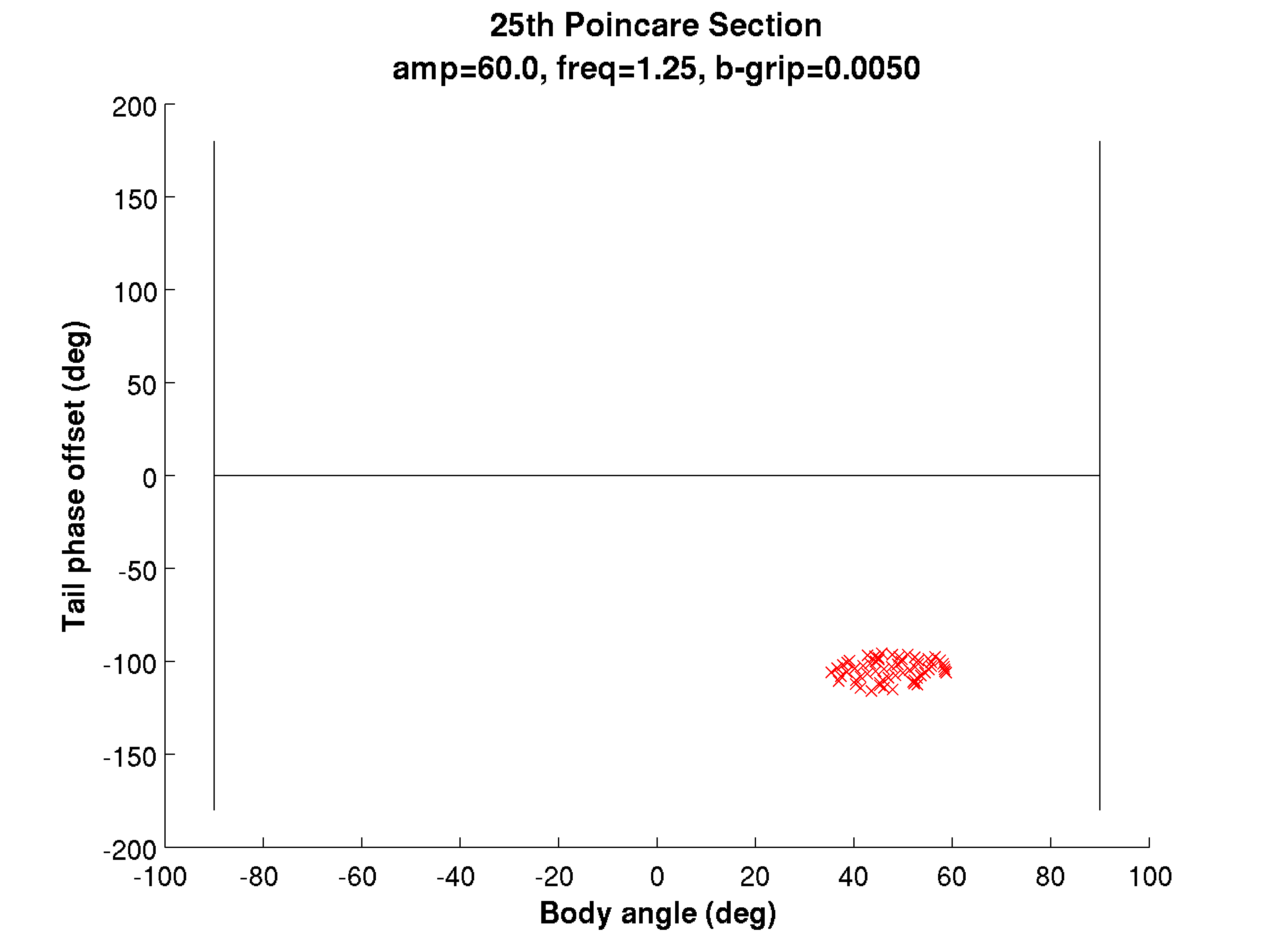
Below are plots of the 25th stride. The 0.75 Hz & 1 Hz climbers have converged to a steady state climbing trajectory (from the red circles in the above plots), while the 1.25 Hz climber appears to be slowing converging to one (or just climbing chaotically within a small region of the space...??)
The feasible set for 0.75Hz is empty. For initial conditions which are actually permissible in the right-foot only state, ROCR mostly stays in place w/ both feet attached, with quick bounces into the right foot only state.
Below are plots of the 25th stride. The 0.75 Hz & 1 Hz climbers have converged to a steady state climbing trajectory (from the red circles in the above plots), while the 1.25 Hz climber appears to be slowing converging to one (or just climbing chaotically within a small region of the space...??)

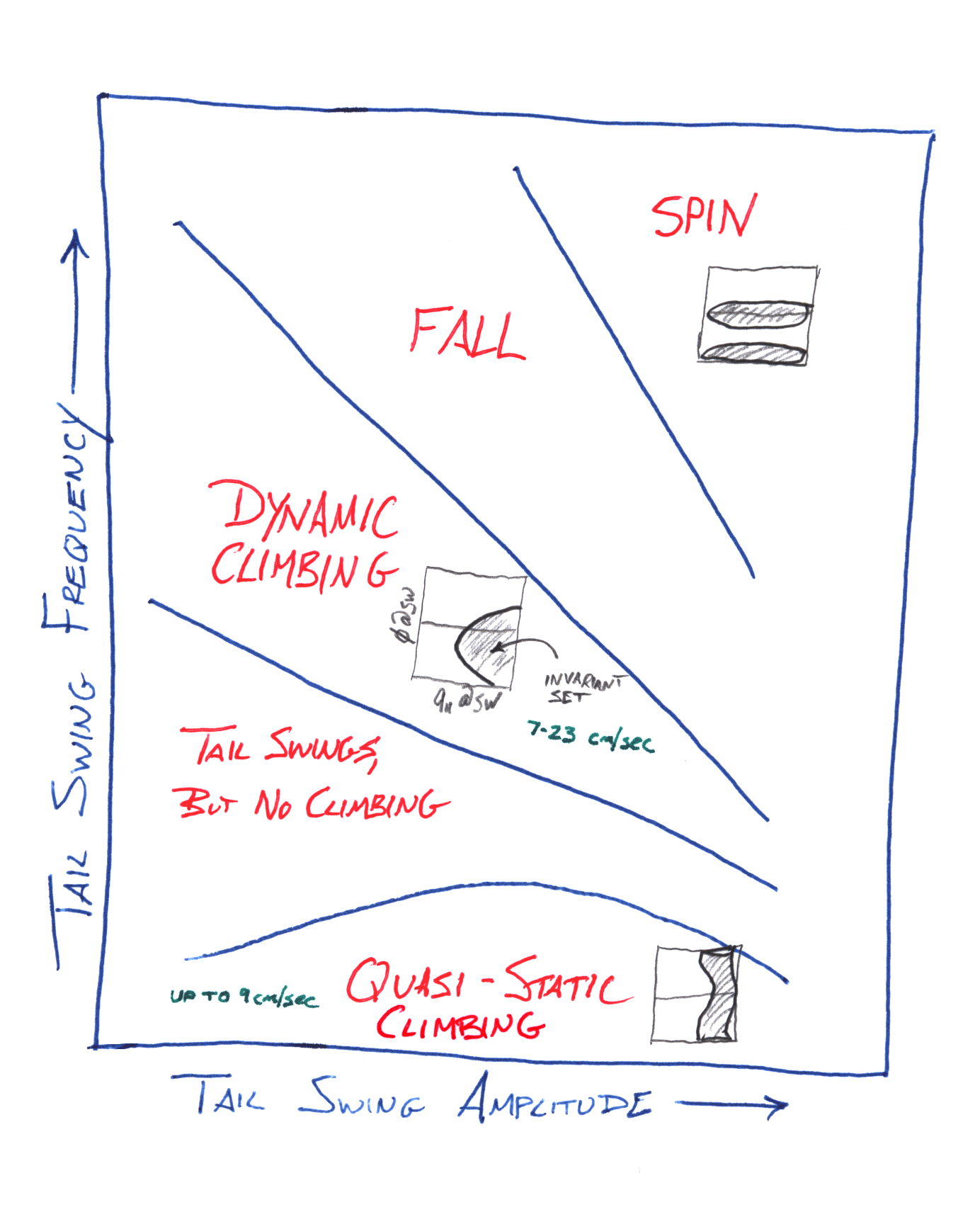
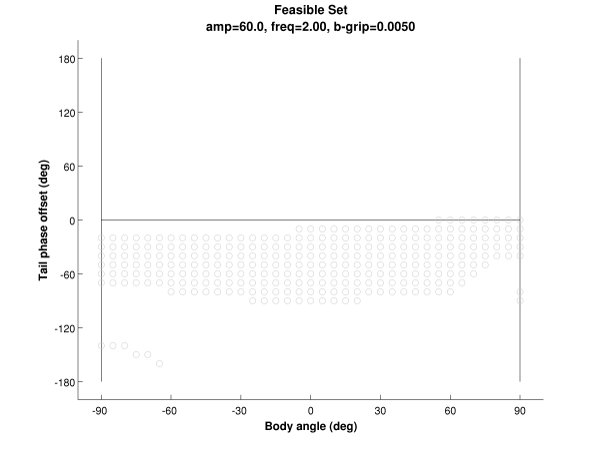
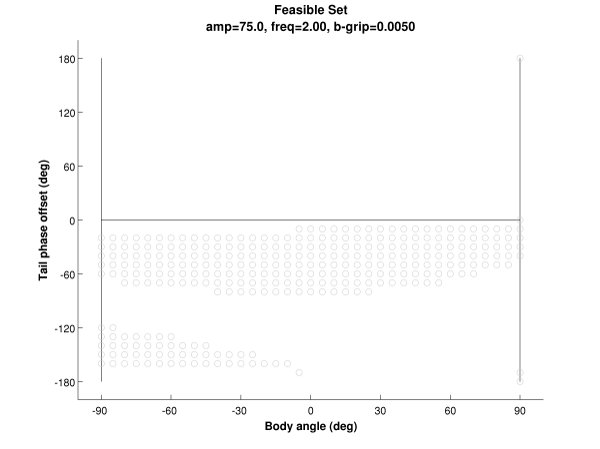
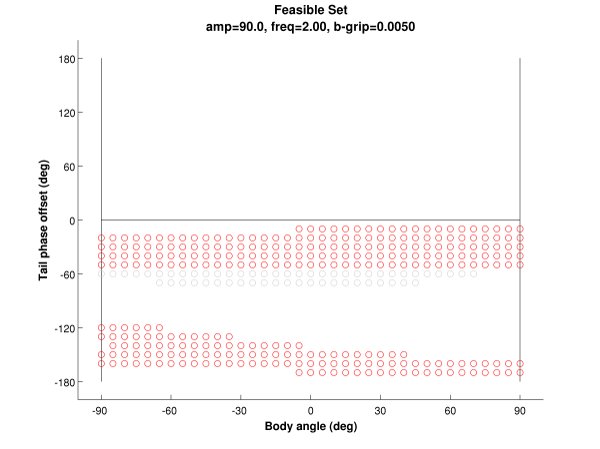
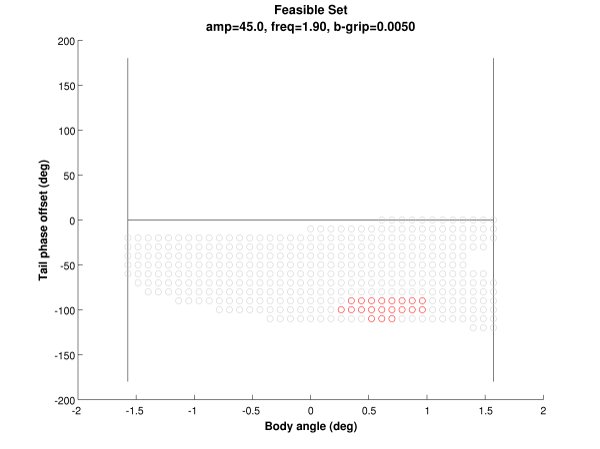
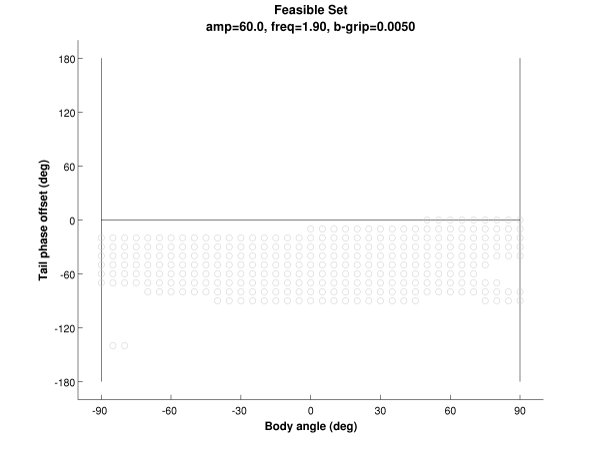
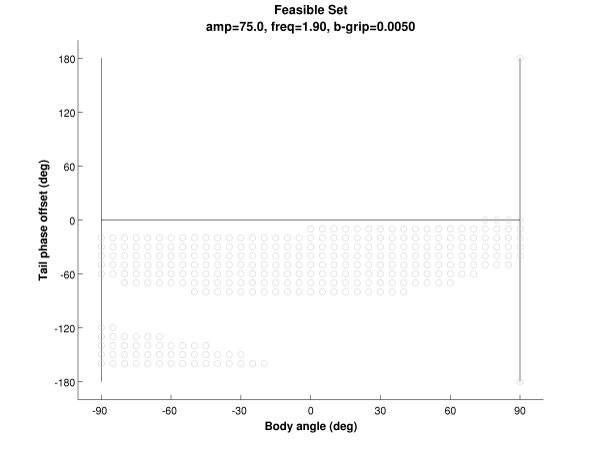
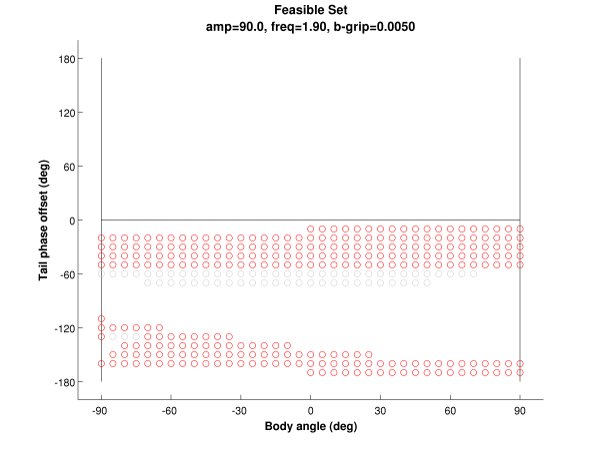
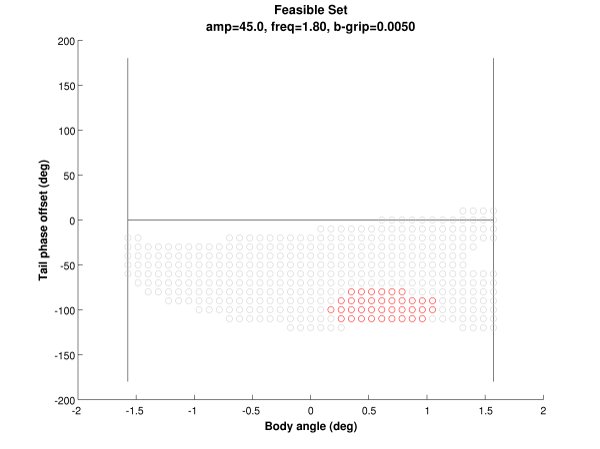
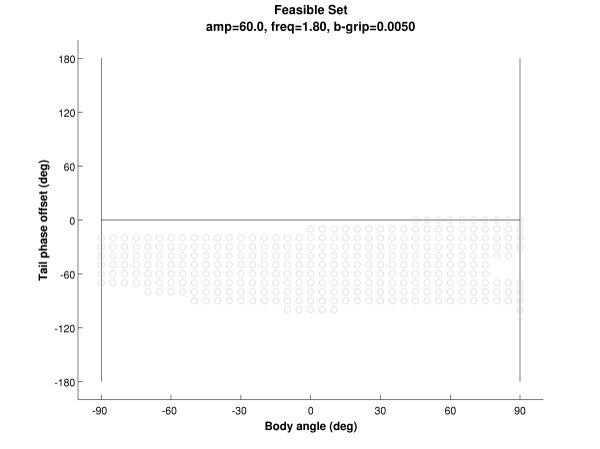
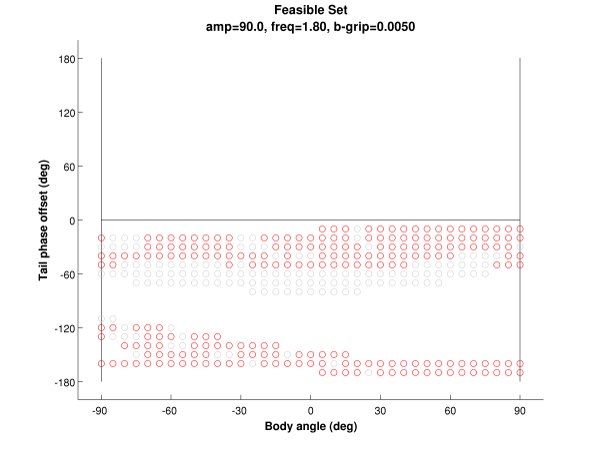
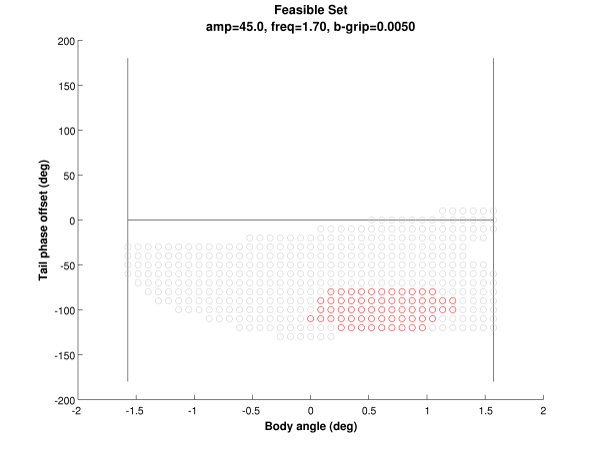
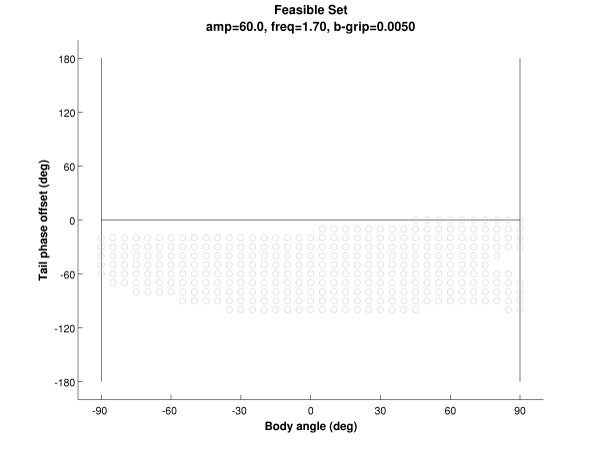
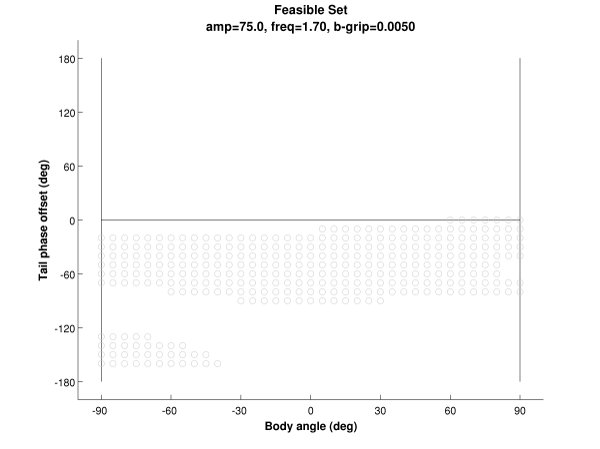
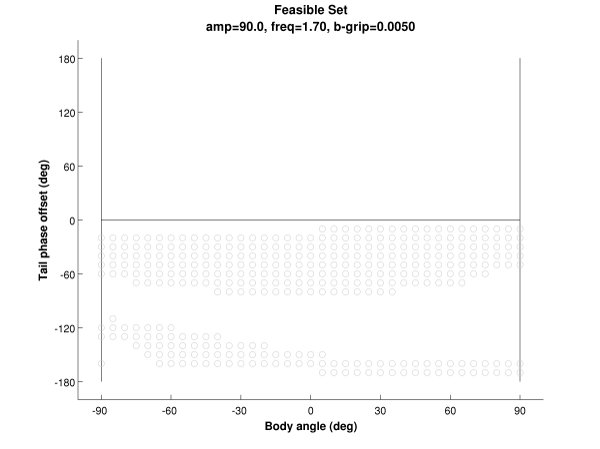
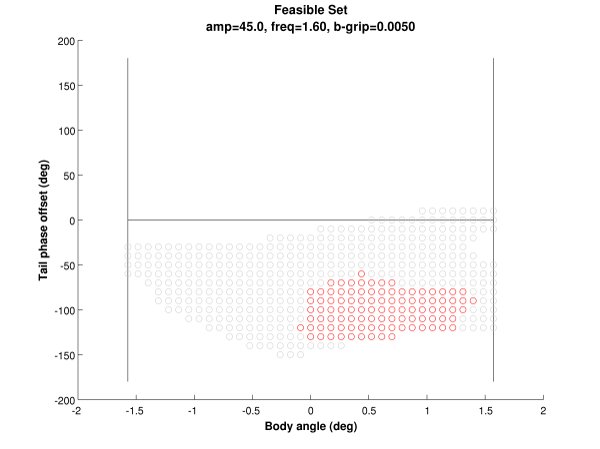
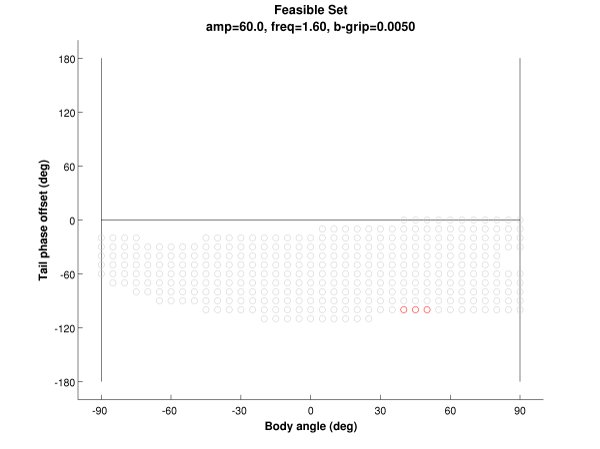
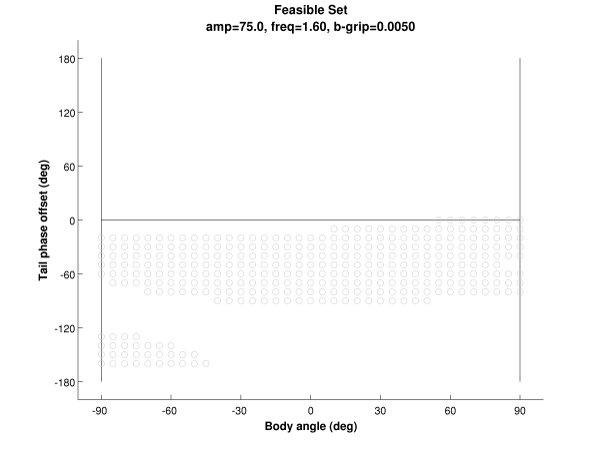
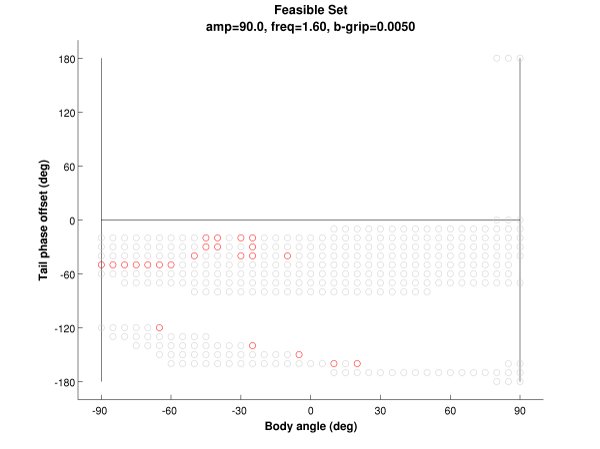
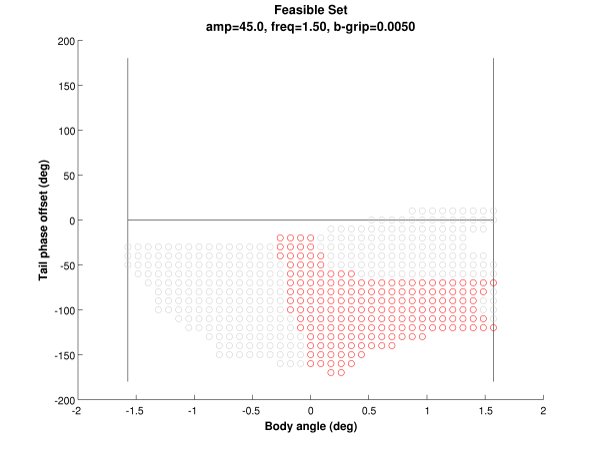
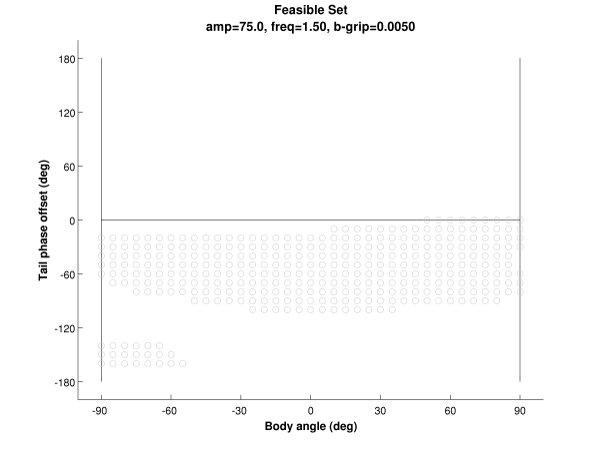
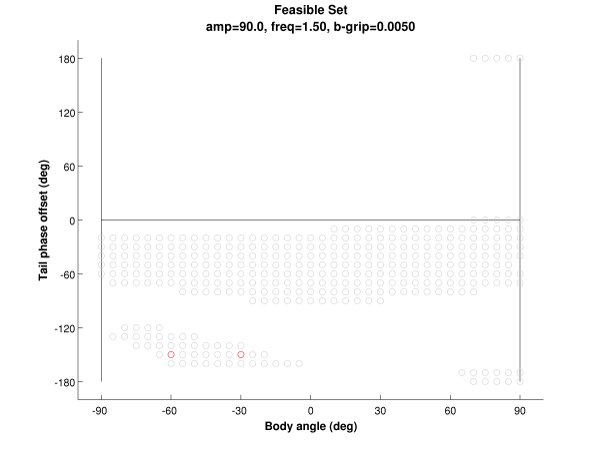
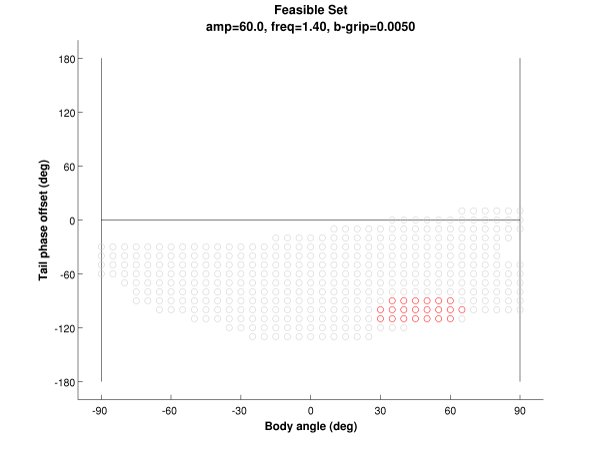
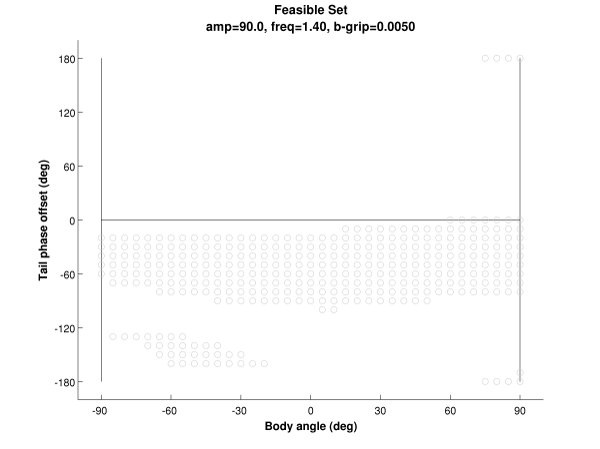
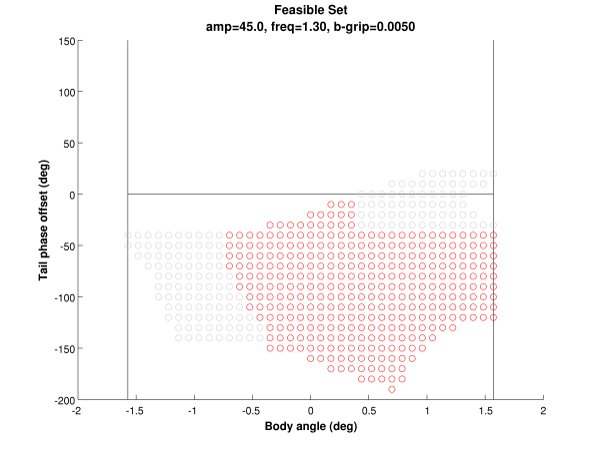
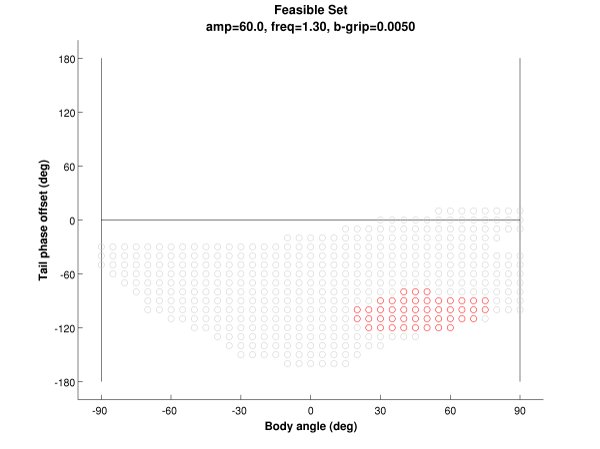
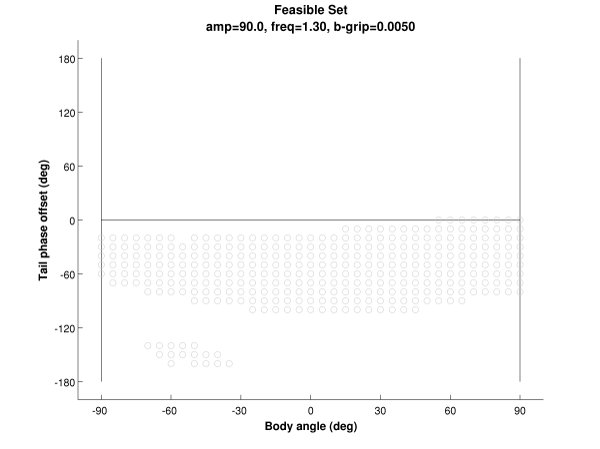
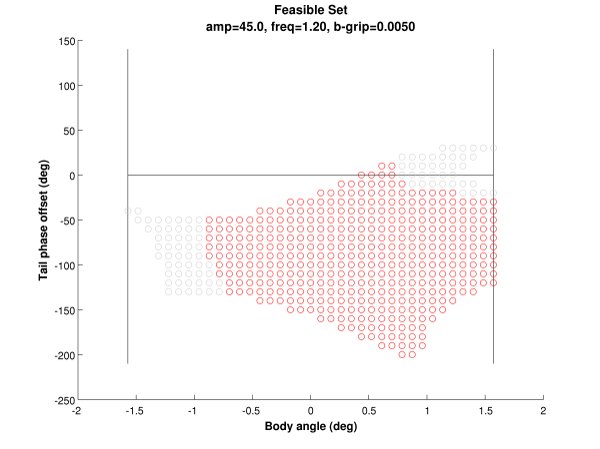
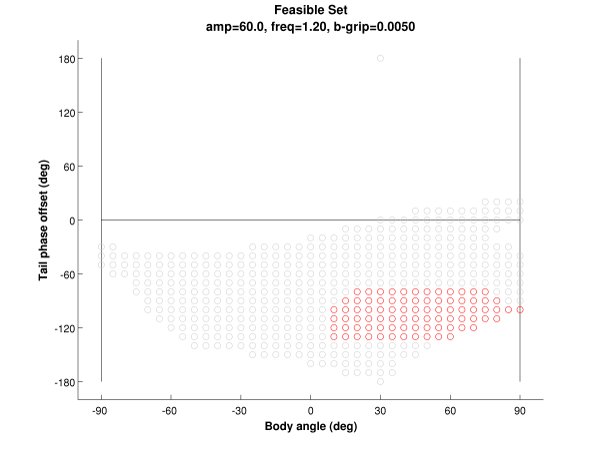
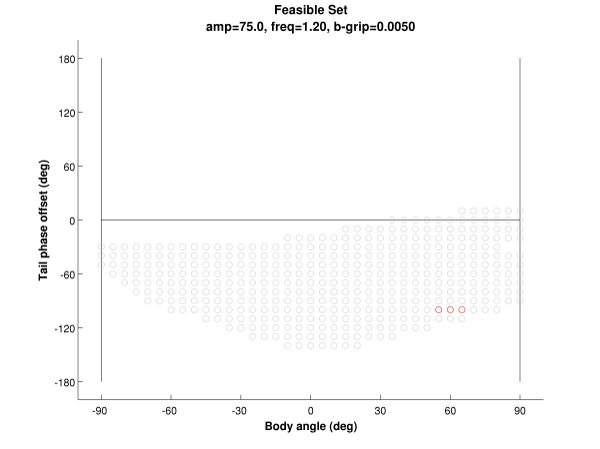
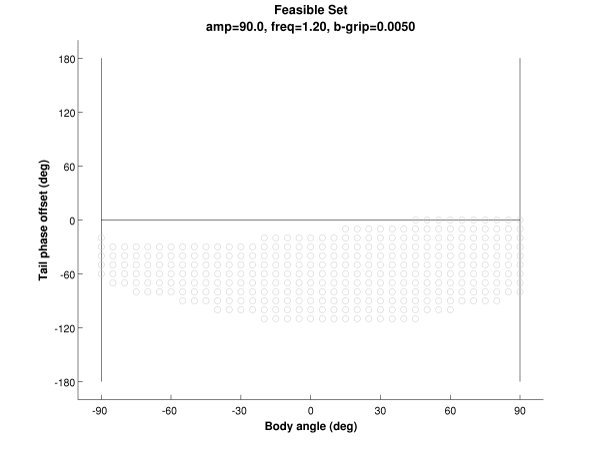
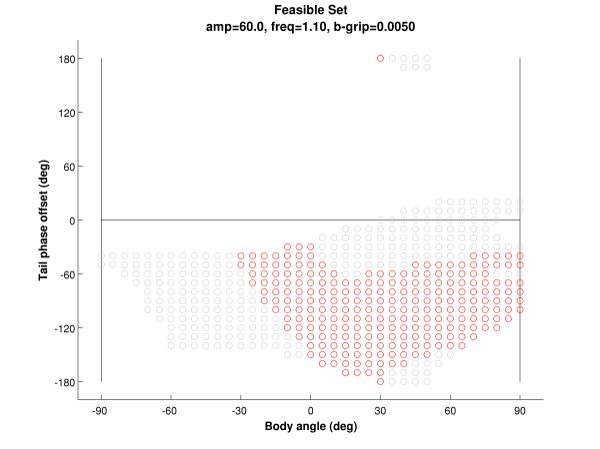
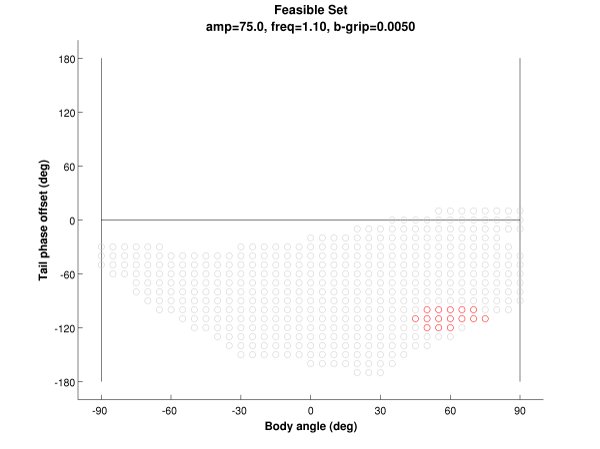
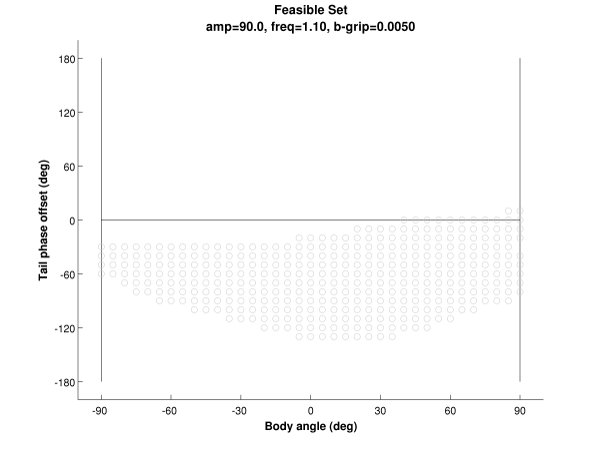
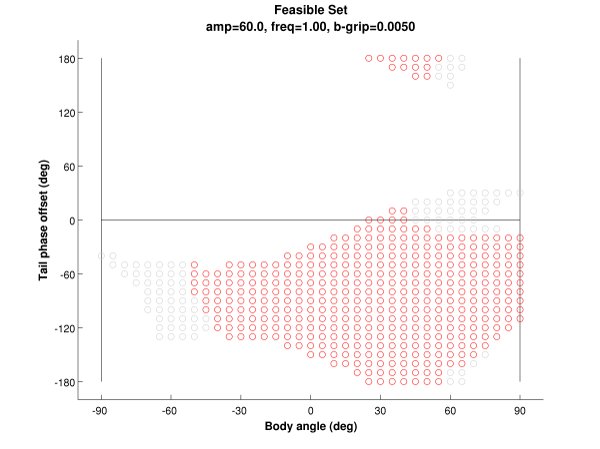
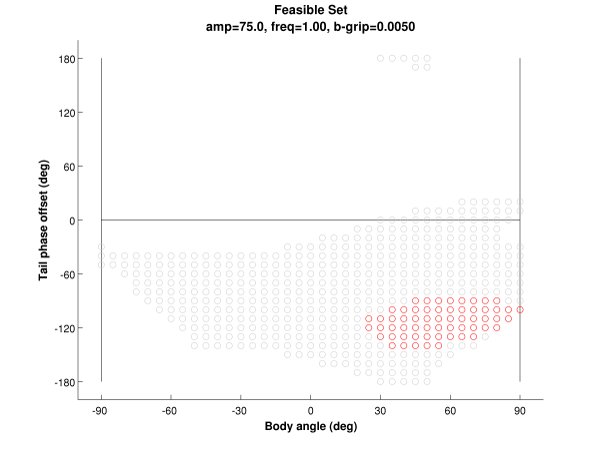
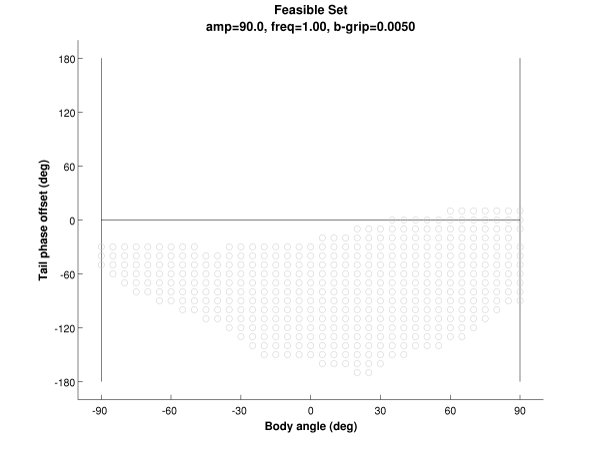
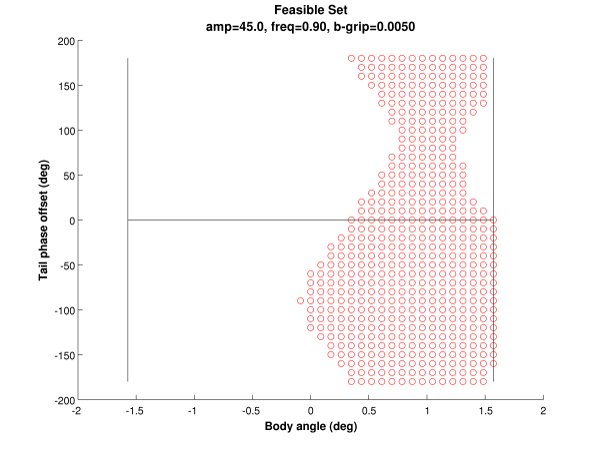
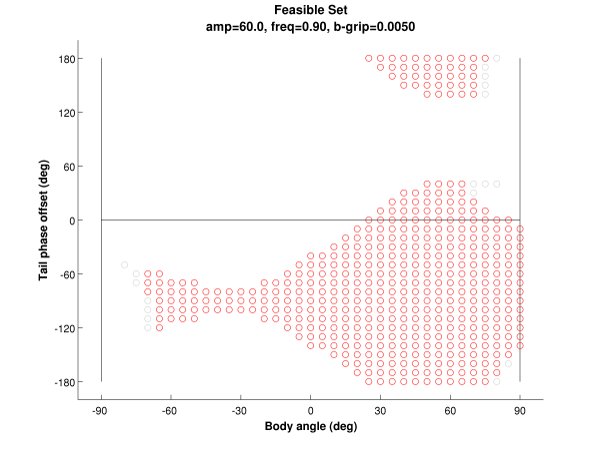
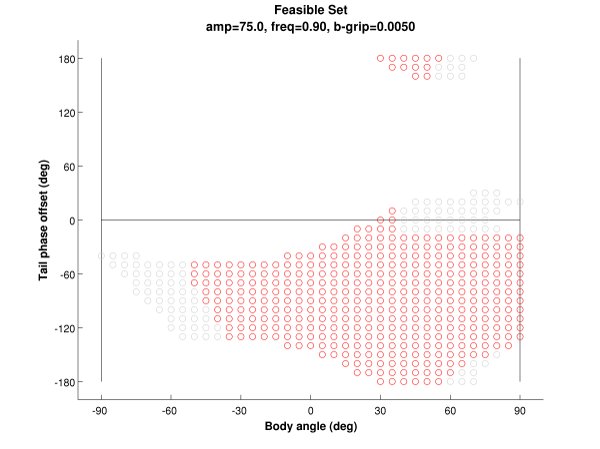
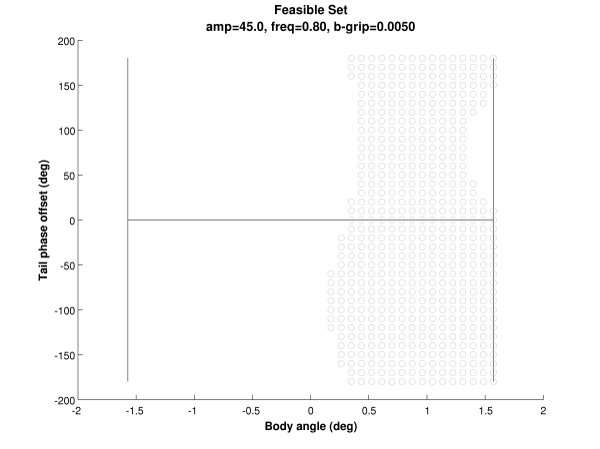
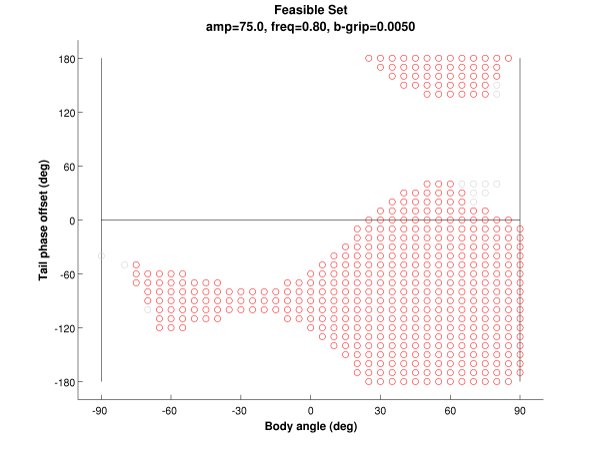
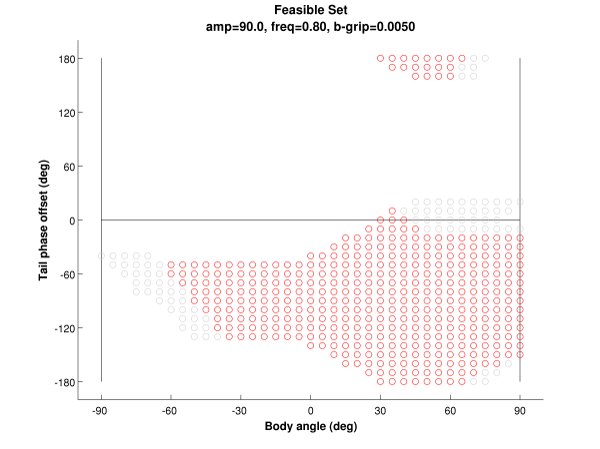
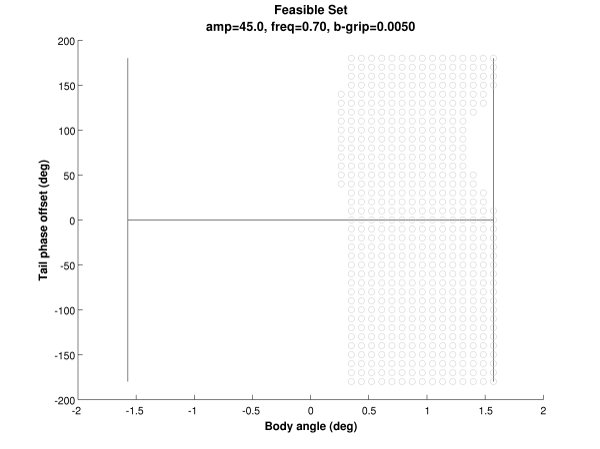
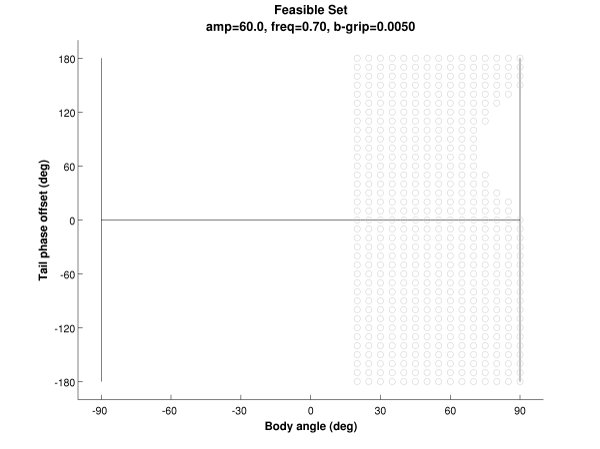
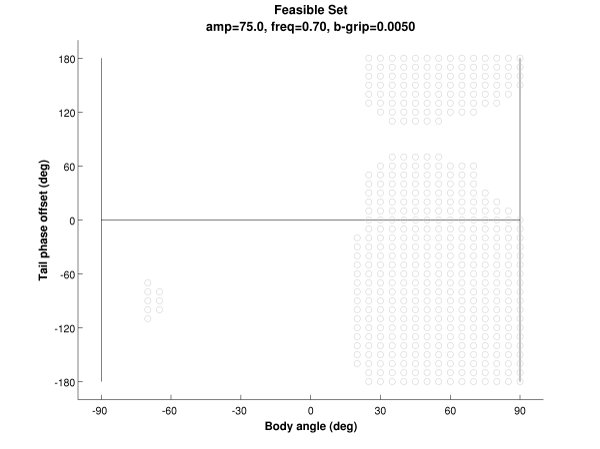
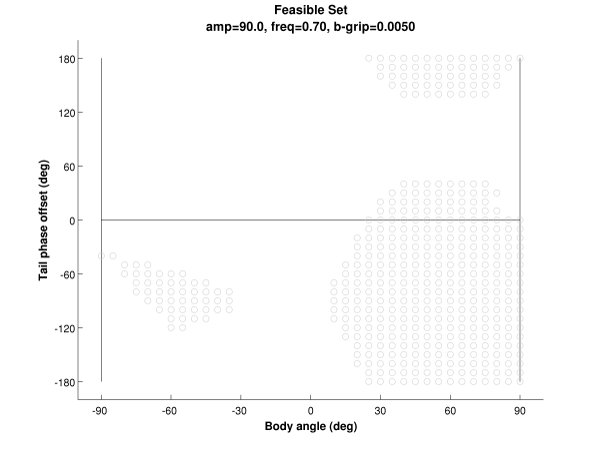
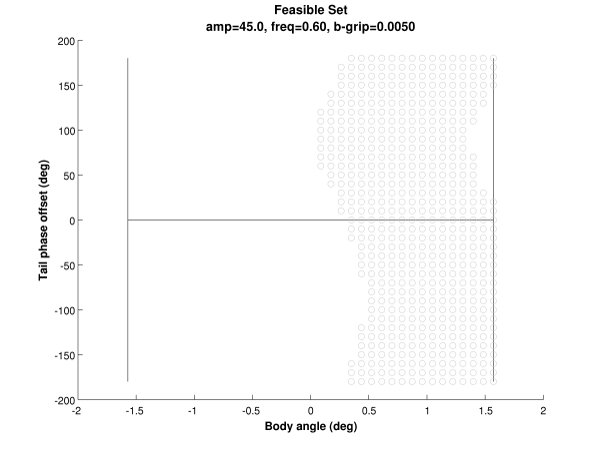
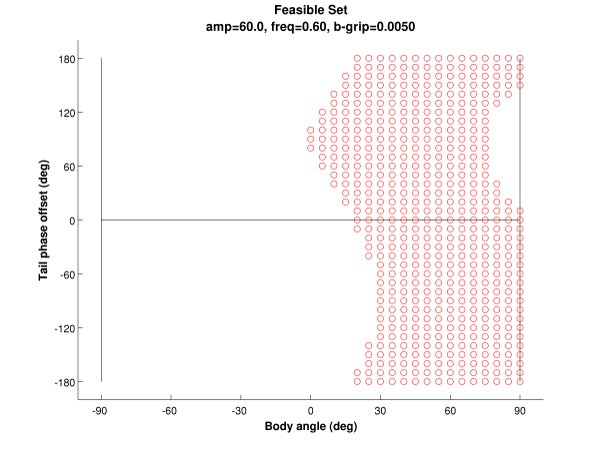
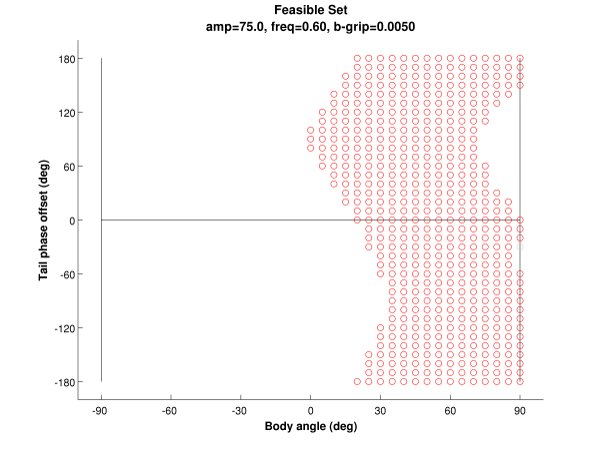
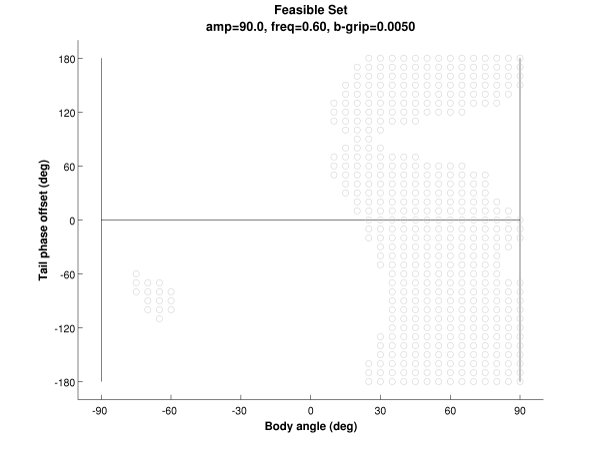
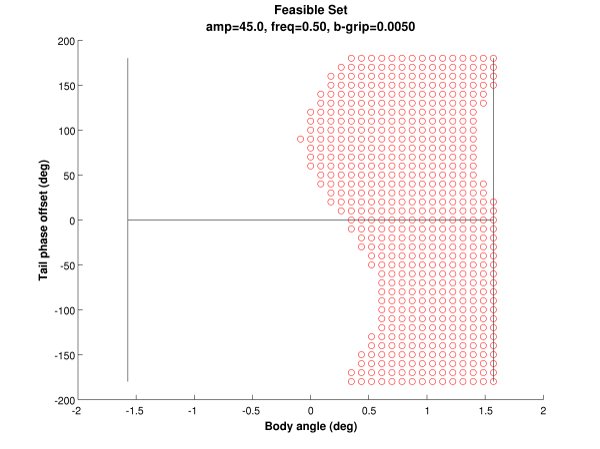
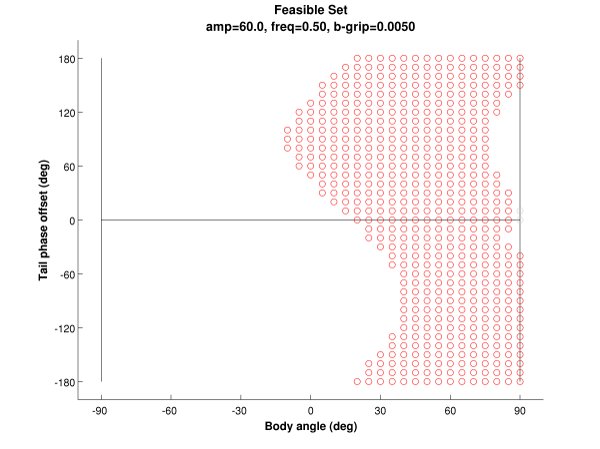
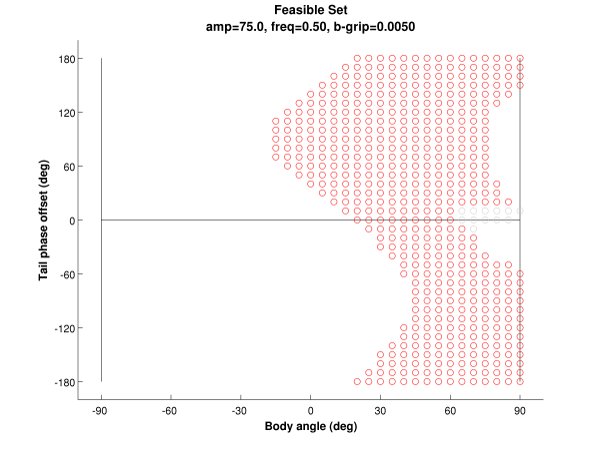
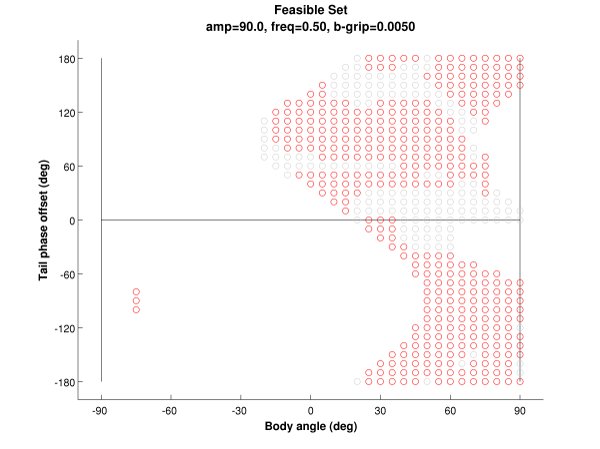
 In the following table, the feasible initial condition set (grey circles) and initial conditions which don't fail in 10 strides (red circles), aka an invariant set are plotted for various tail swing amplitudes and frequencies. The boundaries are interesting, as depicted in the following cartoon:
In the following table, the feasible initial condition set (grey circles) and initial conditions which don't fail in 10 strides (red circles), aka an invariant set are plotted for various tail swing amplitudes and frequencies. The boundaries are interesting, as depicted in the following cartoon:
The feasible set for 0.75Hz is empty. For initial conditions which are actually permissible in the right-foot only state, ROCR mostly stays in place w/ both feet attached, with quick bounces into the right foot only state.
Below are plots of the 25th stride. The 0.75 Hz & 1 Hz climbers have converged to a steady state climbing trajectory (from the red circles in the above plots), while the 1.25 Hz climber appears to be slowing converging to one (or just climbing chaotically within a small region of the space...??)
In the following table, the feasible initial condition set (grey circles) and initial conditions which don't fail in 10 strides (red circles), aka an invariant set are plotted for various tail swing amplitudes and frequencies. The boundaries are interesting, as depicted in the following cartoon:
Photon 0.4.6









Ideas, requests, problems regarding TWiki? Send feedback