new web: http://bdml.stanford.edu/pmwiki
TWiki > Main Web>TWikiUsers > JonathanKarpick>CwRU (16 Apr 2009, JonathanKarpick)
Main Web>TWikiUsers > JonathanKarpick>CwRU (16 Apr 2009, JonathanKarpick)
-- JonathanKarpick - 16 Apr 2009
Pictures from Case Western Reserve University's ShowCASE event, 16 April 2009
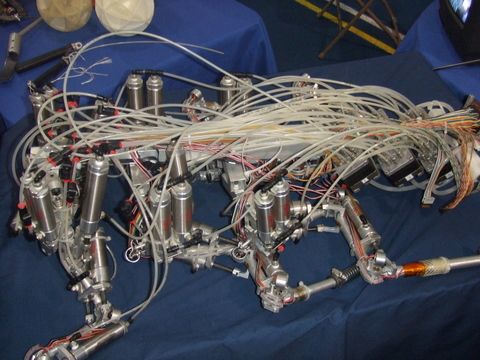
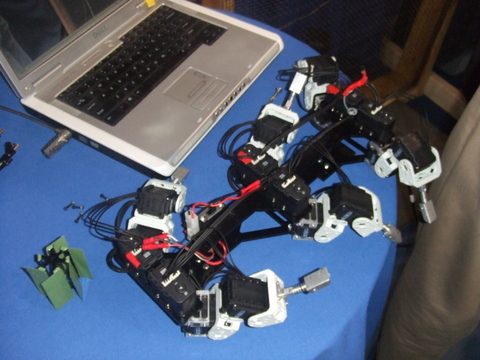
- hexapod_climb.avi: Hexapod climber - cool servos run via serial commands. Feed-forward control via Matlab real-time. (13.2MB)
- holk-cruse-like-leg.avi: Holk Cruse-like limb. Used to test out theories on Holk Cruse-like control systems for limbs. (3.3MB)
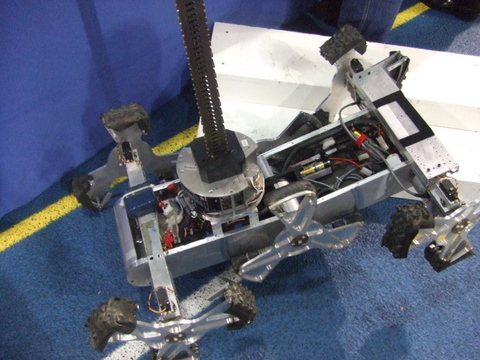
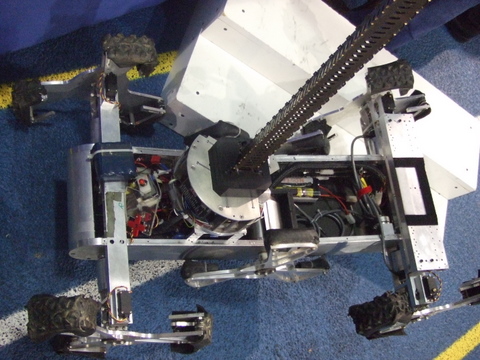
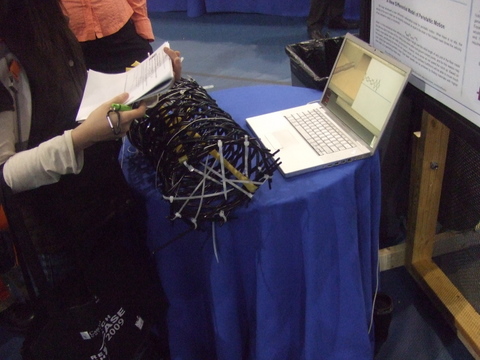
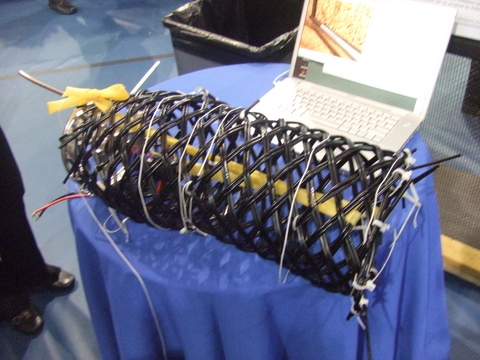
- Big WHEGS - that tower popping out the top is pretty cool - it is three sections that unzip at the bottom and each one rolls onto a separate spool. The thing zips together as it goes up to around 8 feet in height:

- On main motor for propulsion. Tiny servos for steering. Medium motor for body articulation:
- DSCF0457.JPG:
- DSCF0459.JPG:
- Mini WHEGS climbs hip-height obstacles:
- DSCF0463.JPG:
- "For historical purposes":
- DSCF0467.JPG:
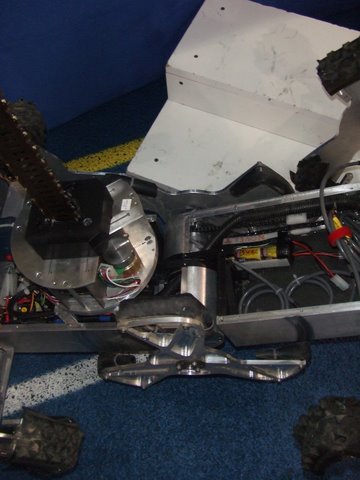
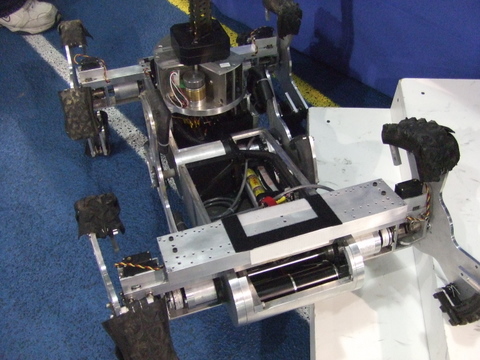
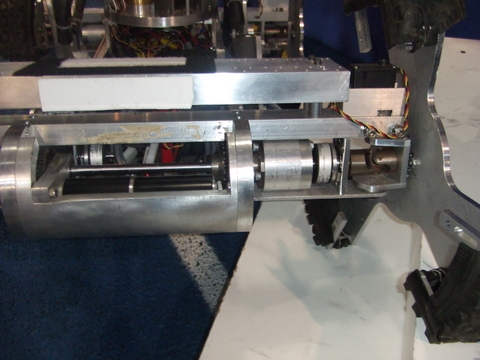
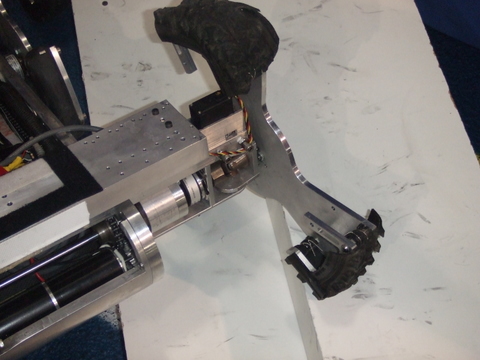
- Close-up of drive train. That cyclinder to the left of the encoder provides rotational compliance:
- Zipper thingy. Need to find the real name of that:

- No compliance on these legs. They have other legs with compliance - but run into issues with being too bouncy:
- Leg prototypes - combination of FDM and machining:

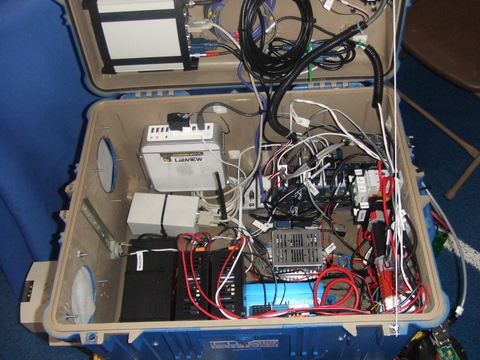
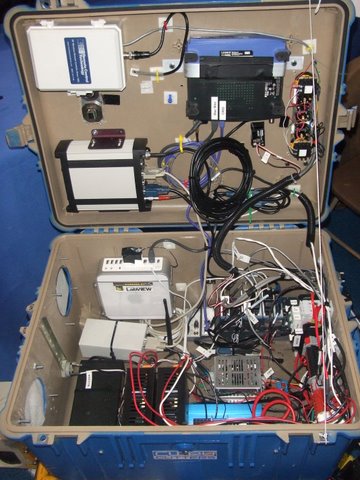
- Insides of lawnmower robot - powered by a Mac Mini! (actually, powered by National Instruments - the mac mini is for vision processing):
- DSCF0480.JPG:
- DSCF0481.JPG:
- DSCF0482.JPG:
- DSCF0483.JPG:
- Brake cable housing!:

- DSCF0487.JPG:

- DSCF0489.JPG:
- DSCF0491.JPG:

- Cool servos - commands run on a serial bus:

- Gecko patches - non-directional - made in germany:
- Carbon fiber airplane w/ retractable wings. The wings retract for moving on the ground via a whegs-like thing that wasn't attached here. This thing really needs perching capability:

Ideas, requests, problems regarding TWiki? Send feedback