new web: http://bdml.stanford.edu/pmwiki
TWiki > Haptics Web>StanfordHaptics > SkinStretch>ProjectOverview (14 Jul 2008, MarkCutkosky)
Haptics Web>StanfordHaptics > SkinStretch>ProjectOverview (14 Jul 2008, MarkCutkosky)
Why Skin Stretch?
Why are we focusing on applying skin stretch to provide haptic feedback? Other common methods of haptic feedback are vibration and force feedback. Unfortunately, the display of sustained contacts with continuous vibration can become annoying to users and can lead to desensitization. In addition, in dynamic situations, (e.g. while dancing or jogging) the threshold of detectability for vibration feedback can suffer. Force feedback devices are comparatively encumbering and bulky and have a high power consumption – all of which make them difficult to adapt to individuals moving freely. As a compromise between these two extremes, we propose to investigate light-weight, low-power devices that augment vibration with stimulation of superficial slow-acting (SAII) mechanoreceptors. For unencumbering wireless displays, skin stretch is especially appealing as it does not require much power; motions and velocities can be low. It has been shown in previous research that mechanoreceptors respond quickly and accurately to skin strain changes. Below is a diagram of the mechanorecptors in the hairy skin, which is the skin that covers the body (minus palms and bottom of foot). When studying the function of the mechanoreceptors in relaying information to the brain, it is clear that skin stretch is an important part of touch sensations. We are working to explore how we can manipulate our sensors into providing richer information through touch.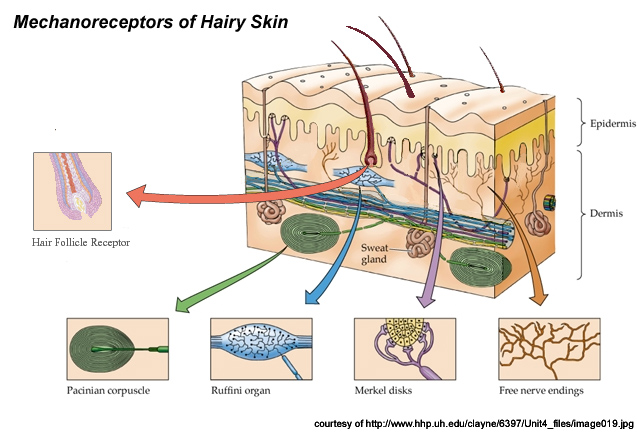
| Mechanoreceptor | Receptor type | Function |
|---|---|---|
| Merkel Disks | Slow Adapting | Pressures/Textures |
| Ruffini Endings | Slow Adapting | Directional skin stretch |
| Pacinian Corpuscles | Fast Adapting | Vibrations |
| Hair Follicle Receptors | NA | Hair movement |
| Field Receptors | NA | Skin stretch |
Project Goals
The research necessary to develop a wireless, portable skin stretch display has been divided into three phases. We are currently working on phase I.- I. Exploration of skin stretch display on limbs and torso including determination of best methods for inducing skin stretch, threshold of detection and just-noticeable differences;
- II. Exploration of multi-modal display combining skin-stretch and vibration for display of “status” and “event” information for subjects moving in a virtual environment;
- III. Exploration of multi-modal wireless display for groups of individuals engaged in collaborative activities.
General Questions to Answer
- What is the most effective way to induce skin stretch (e.g., via rotation or other shear deformation? with or without local stabilization of the surrounding skin? with or without suction?)
- Does it give more repeatable results between subjects to control displacement and measure force or vice-versa? Does an individual’s skin elasticity influence their ability to perceive haptic feedback through skin stretch?
- What is the minimum threshold for detection of skin stretch at various locations?
- Which locations on the limbs and body are most suitable for skin stretch display? Do the thresholds for detection on the body change when (i) a person is sedentary and (ii) when a person is moving?
- What benefits can skin stretch haptic display provide? How will skin stretch feedback compare to vibration feedback? What can skin stretch provide that vibration cannot?
Ideas, requests, problems regarding TWiki? Send feedback