This document describes the experiment and preliminary results shown in our Haptics Symposium 2010 paper.
Results also summarized
here.
Experimental Validation
We tested 10 subjects with the following protocol:
(1) Single parameter gaits
Subjects were train to walk with five new gaits in separate trials. These gaits included (a) toe out, (b) toe in, (c) knee in, (d) increased trunk sway, and (e) increased stride length. Each of these trials lasted for 50 steps and subjects were given haptic, visual, haptic & visual, or auditory (for stride length) feedback to learn these single parameter gaits.
(2) Multiparameter gaits
Subjects were trained to walk with three subject-specific multiparameter gaits in separate trials. These multiparameter gaits were generated as described in the next section (Predicting New Gaits). Subjects were given haptic feedback to control their foot, knee, and trunk angles and auditory feedback to control their stride length.
Feedback
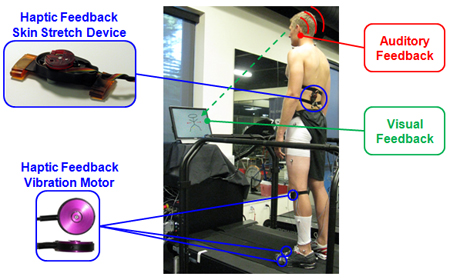
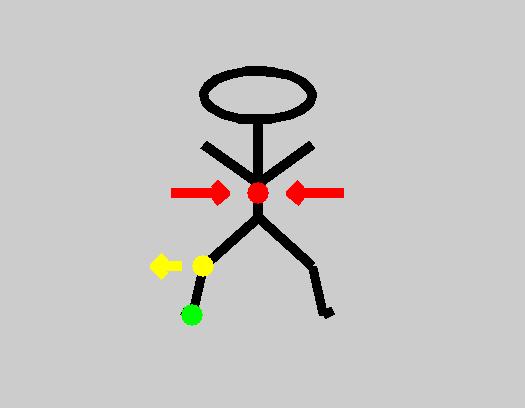
Haptic, visual, and auditory feedback is used in the experiments. We use haptic/visual/haptic+visual feedback for training foot progression, tibia, and trunk sway angles for the single parameter gaits. Above stick figure is given to subjects as visual feedback. This feedback can reinforce the haptic feedback for each location. Right now, it is unclear to what extent giving subjects this additional feedback will assist or hinder in learning new gait patterns. In addition, auditory feedback is used for controlling stride length. Subjects were trained with only haptic and auditory feedback (for stride length) for each of the multiparameter gaits.
Predicting New Gaits
Method for Predicting New Gaits (Simplified to 1D)
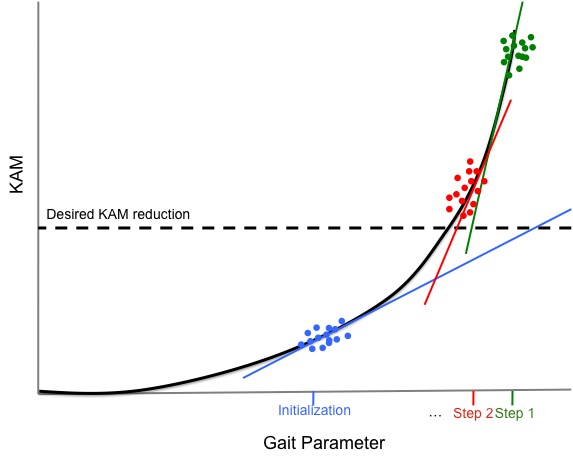
We would like to determine the gait which achieves at least 30% KAM reduction with minimal changes to subject's baseline gait.
Two steps to our Newton's method-like approach:
(1)
Initialization: To initialize the algorithm, we choose a point in the direction of correlation for each of the parameters. For example, if knee and KAM are positively correlated, the initialized value for knee angle will be negative for a reduction in KAM.
(2)
Iteration: Based on the final gait of the previous trial, we create a linear model about that point and predict new gait in direction of minimum change.
Using the final gait and knee adduction moment reduction from previous trial, we create a linear model around this point. (A is an (m x 4) matrix consisting of m point)

New gait is in x-direction and is given by:
 w
w is a scalar which weights the x vector to predict a gait with 30% reduction in KAM
 (1) Reduction in Knee Adduction Moment with Multiparameter Gaits
(1) Reduction in Knee Adduction Moment with Multiparameter Gaits
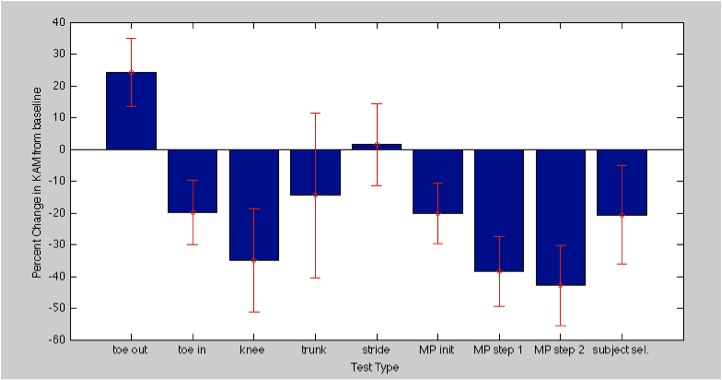
Multiparameter gaits reduce KAM more than 30% on average.
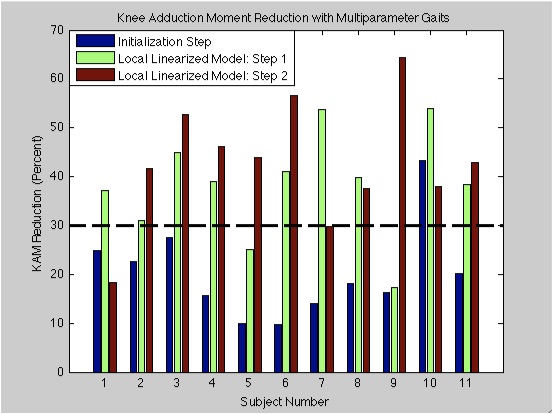
In particular, multiparameter gaits reduce KAM more than single parameter gaits and more than gait selected by subject (p < 0.05) (Jason and Pete's previous KAM study)
 (2) Multiparameter Gaits are Subject Specific
(2) Multiparameter Gaits are Subject Specific
Gaits are subject specific.
For example, subject 12 required much more trunk sway to get similar reductions as subject 2.
Sample Multiparameter Gait Achieved by Subjects 2 and 12:
| Stride Length (% Change) |
-1.8 |
-12.0 |
| KAM Reduction (% Change) |
-33.7 |
-33.8 |
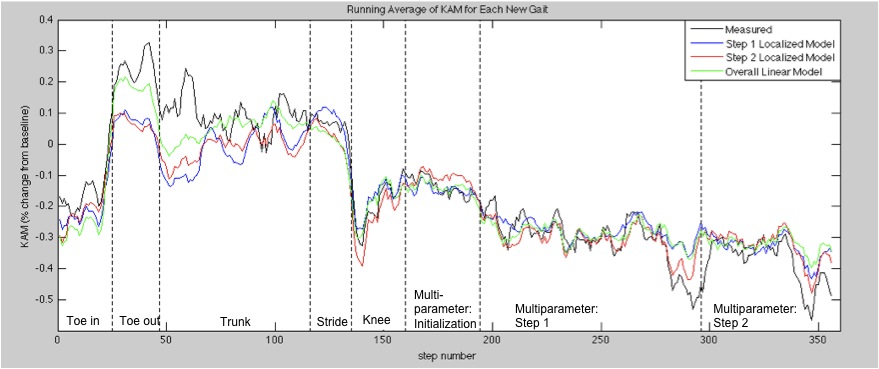
(3) Localized Linear Model Prediction of Knee Adduction Moment Reduction
We can loosely track knee adduction moment using our localized linear model.
 Haptics Web>StanfordHaptics > HapticsForGaitRetraining>HapticsSymposium2010 (02 Jul 2010, PeteShull)
Haptics Web>StanfordHaptics > HapticsForGaitRetraining>HapticsSymposium2010 (02 Jul 2010, PeteShull)