
About me
I am currently at Intuitive Surgical Inc. I received my PhD in Mechanical Engineering at Stanford and went to Dartmouth College for undergrad. Outside of school, I love climbing, Bikram, my dog, and weekends in Yosemite. More about me can be found here and here.
Current Research
I am working on a project in collaboration with Intuitive Surgical Inc. on adding sensors to the end effectors of instruments for minimally invasive surgery. Grasping and manipulation of biological tissue are crucial processes during minimally invasive surgery (MIS). Surgeons attempt to maintain their view and control tissue position by tailoring their selection of grasper type to the given task and modulating the grasper jaws to provide just enough force to prevent tissue slip, but not so much that damage occurs. To enable atraumatic and reliable grasping, it would be useful to detect slip. Because the grasped object (biological tissue) is moist, conformable, and delicate, and because the sensor must work in a surgical environment, this application requires a departure from conventional slip sensing methods.
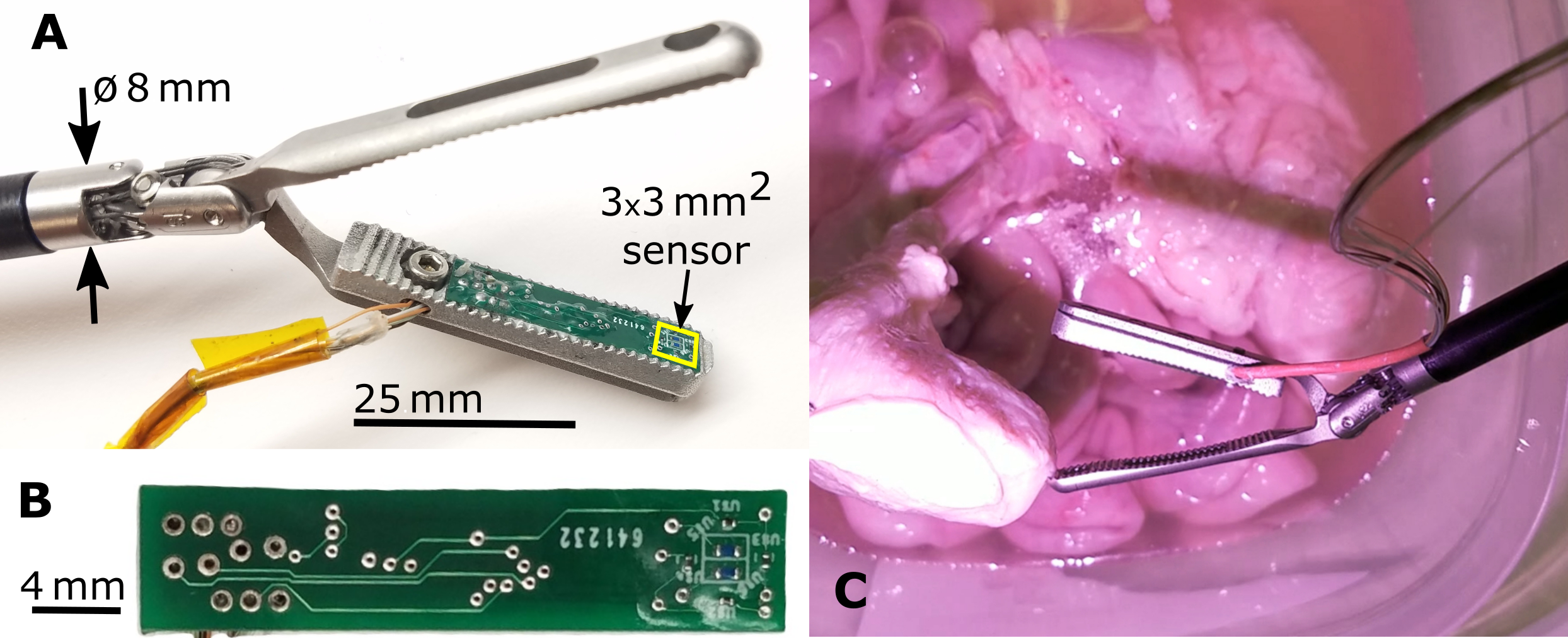
My research concerns development of a technology and method based on hot-wire anemometry to detect slip while grasping wet, conformable materials. The goal is to extend this approach to graspers used in robot-assisted surgery (RAS).
NOTE: I cannot mentor students on this project due to clearance requirements at Intuitive Surgical. I am more than happy to answer questions regarding research at Stanford! :)
Publications
Burkhard, Natalie, Mark Cutkosky, and Ryan Steger. "Slip Sensing for Intelligent, Improved Grasping and Retraction in Robot-Assisted Surgery." IEEE Robotics and Automation Letters, 2018.
Burkhard, Natalie, Ryan Steger, and Mark Cutkosky. "Sensing slip of grasped wet, conformable objects." Intelligent Robots and Systems (IROS), 2017 IEEE/RSJ International Conference on. IEEE, 2017. (paper Δ).
Burkhard, N., Frishman, S., Gruebele, A., Whitney, J.P., Goldman, R., Daniel, B.L., Cutkosky, M.R., "A rolling-diaphragm hydrostatic transmission for remote MR-guided needle insertion," IEEE ICRA 2017 (pdf). Best Robotics Paper Finalist
Wu, X.A., Burkhard, N., Heynemann, B., Valen, R., and Cutkosky, M.R. "Contact Event Detection for Robotic Oil Drilling," IEEE/ICRA 2014, June 2014.