Morgan Pope 
|
Projects |
|
Outdoor Perching and Climbing (SCAMP) 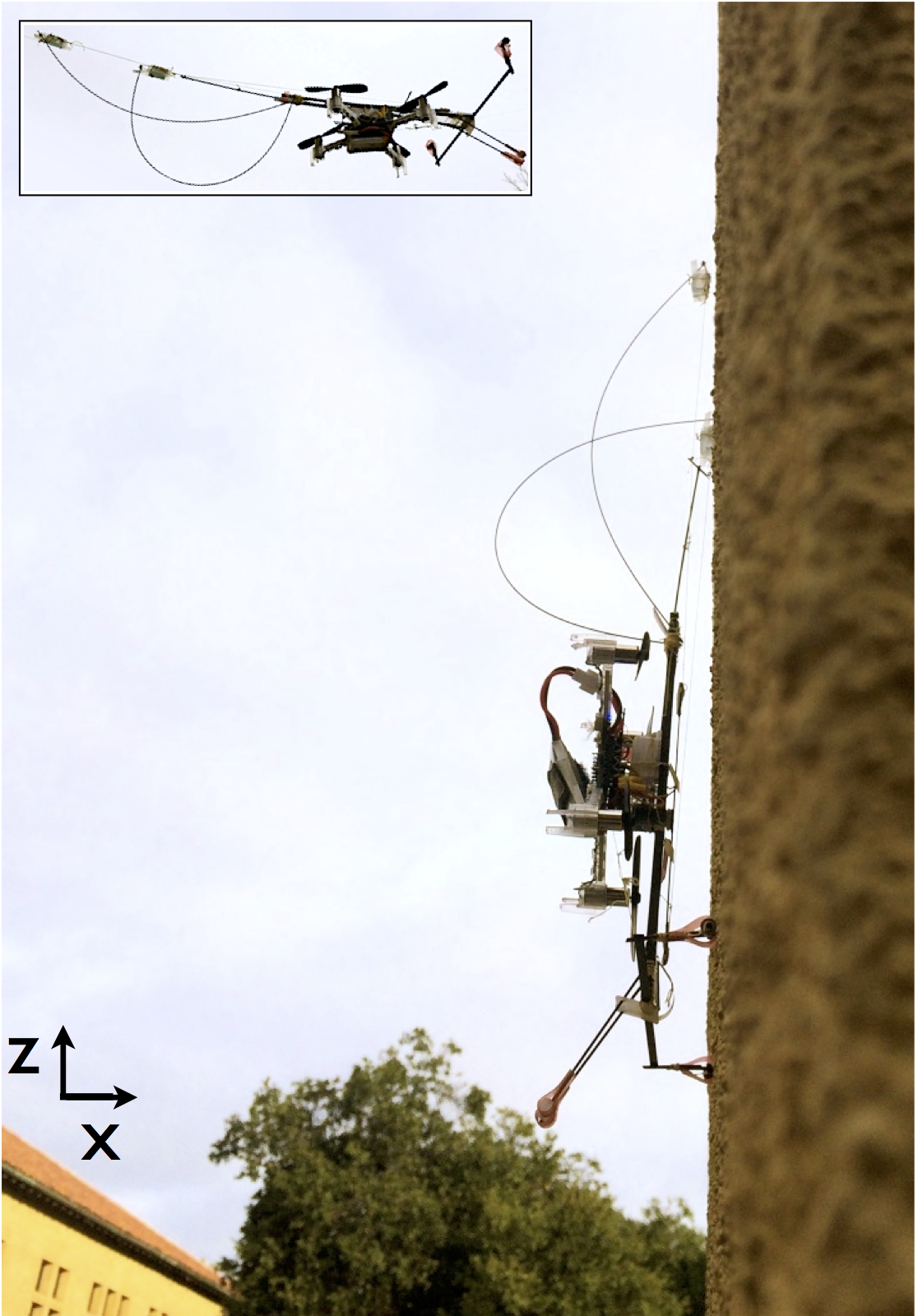 The Stanford Climbing and Aerial Maneuvering Platform (SCAMP) uses an 11 gram mechanism, a 30 gram Crazyflie quadrotor, and onboard sensing and computation to perch on rough surfaces, climb, catch itself when it falls, and take off again. |
Perching on Windows with Gecko Adhesive  To get quadrotors to perch on vertical glass surfaces, we collaborate with Vijay Kumar's GRASP lab and Prof. Sean Humbert's AVL. Dynamic perching loads the gecko adhesive faster than it has ever been tested before and has pushed us to better understand the fundamental physics of dynamic attachment. Understanding the dynamics of the system lets us detect and recover from failure using onboard sensing. 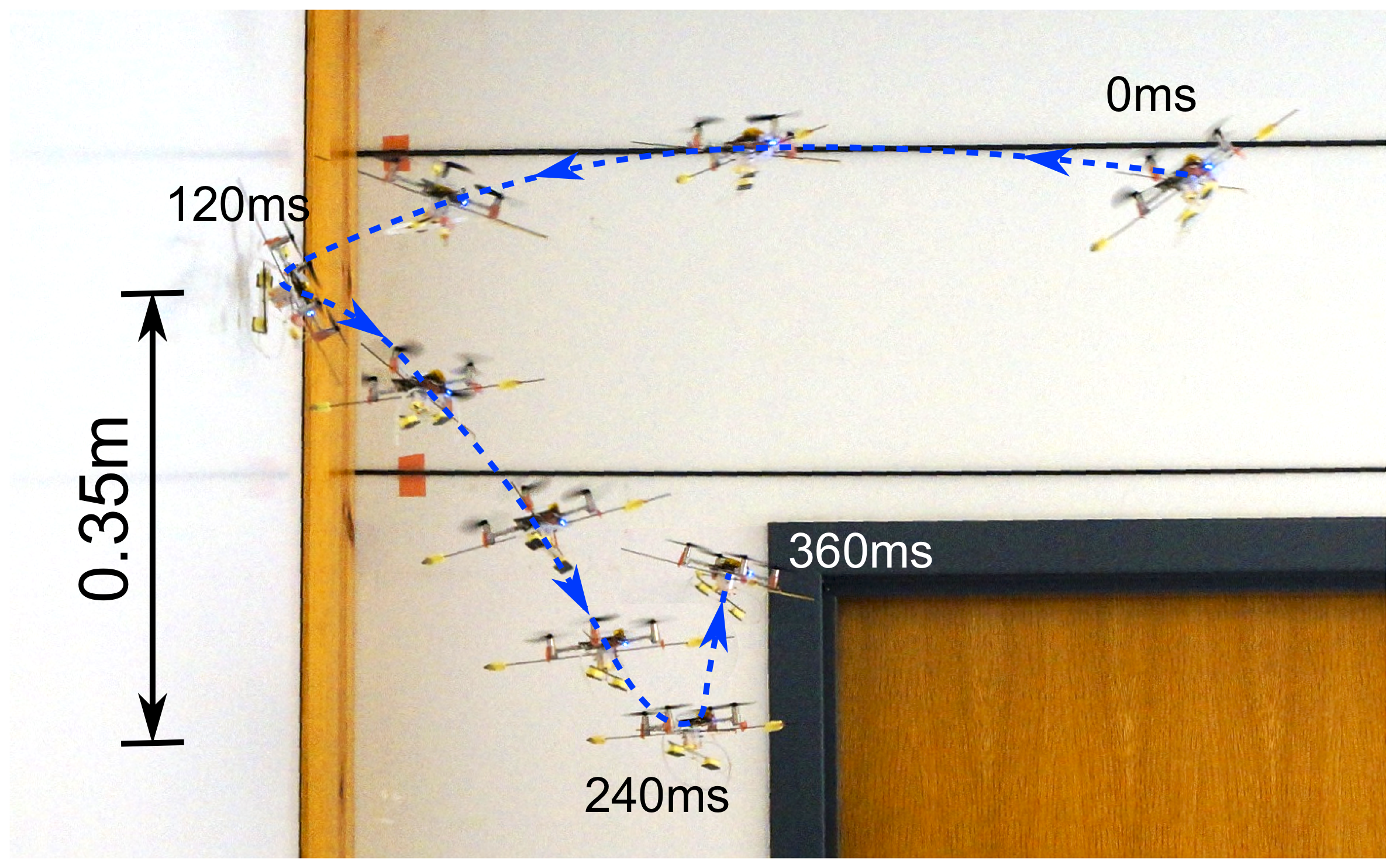 |
Jumping and Gliding (Jumpgliding) 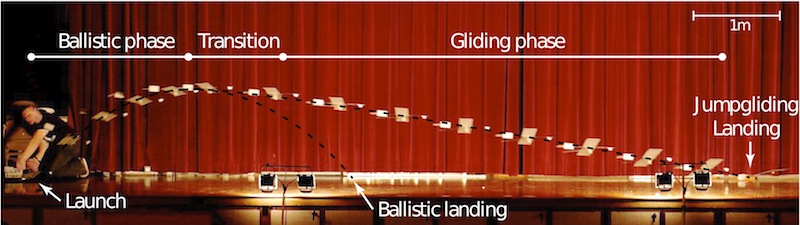 Extending the horizontal distance traveled per jump makes for more efficient jumping locomotion, something that animals like flying fish, snakes, geckos, and squirrels already know. Jumpgliding can achieve real gains over a ballistic jumper by applying just the right amount of aerodynamic force at just the right time. To make our jumpglider run over and over again, we invented a passive mechanical system that slowly wound up the large spring used for jumping, and then automatically released tension at the right moment (patent pending). 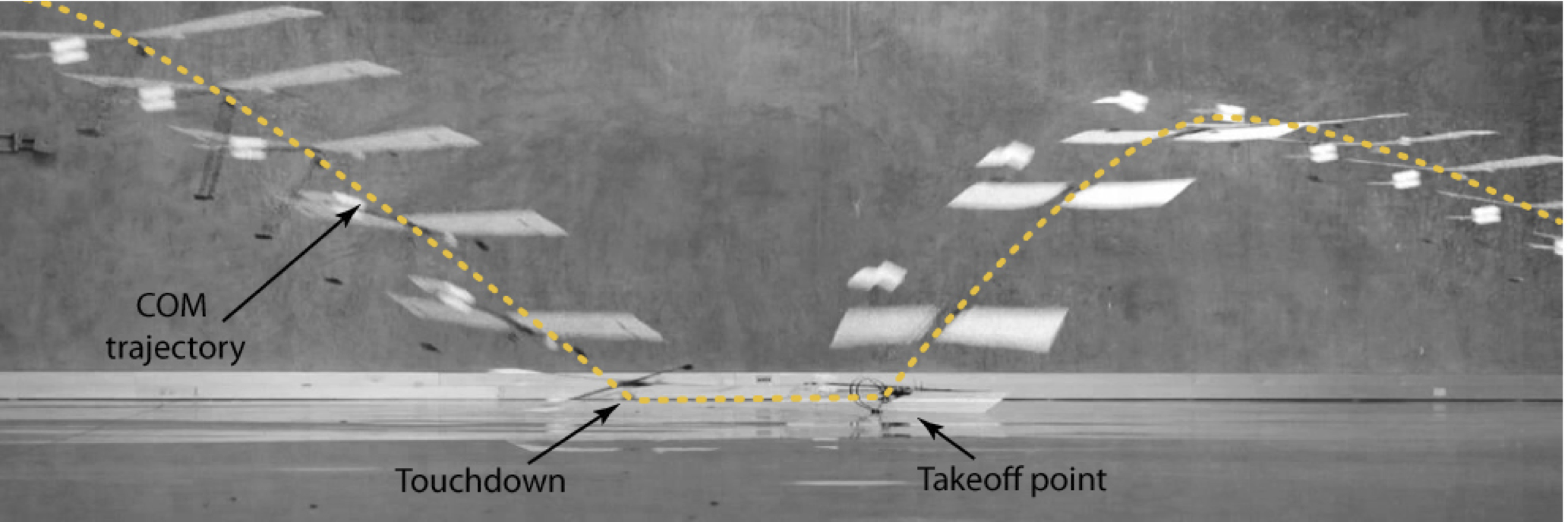 |
|
(:youtube bAhLW1eq8eM width=240 height=135 scale=1 fs=1 hd=1 nocookie=1:) |
(:youtube uFYWiA7jAfI width=240 height=135 scale=1 fs=1 hd=1 nocookie=1:) |
(:youtube sH5L9pW2UqE width=240 height=135 scale=1 fs=1 hd=1 nocookie=1:) |
_______________________________________________________________
Morgan T. Pope
PhD Candidate Mechanical Engineering
Biomimetics and Dexterous Manipulation Lab
mpope [sticky] stanford [bot] edu
418 Panama Mall
MERL Bldg 02-660, Rm 132
Stanford, CA 94305