Adaptive Grasping and Pinching for Mobile Marine Manipulation
{kind=link}
We are building a compliant underactuated robotic hand for humanoid diving tasks, from exploring coral to investigating archaeological sights. The robot is intended not only to replace humans in dangerous diving tasks, but also to provide easy access to previously untouched delicate environments. The hands therefore need to be capable of both strength grasping tasks (for handling tools) as well as gentle precision tasks (for extracting delicate samples or artifacts).
Contributions from this design project include analysis for the adaptive spring transmission of a highly underactuated three-finger hand, as well as implementing gaiting as a way to achieve multiple grasp types with a very simple and robust fixed-base four-finger configuration. SimGrasp was also developed and utilized to simulate various hand design parameters essential to the application. These are the first flexure-based tendon-driven hands designed specifically for these underwater tasks, and balance the inherent compliance of the flexures with the required precision to pinch small, potentially slippery samples.
The initial motivation for the entire underwater bimanual manipulation project was generated through the Red Sea Exploratorium, a collaboration between KAUST, Meka Robotics, and Stanford CS and ME departments.
 | 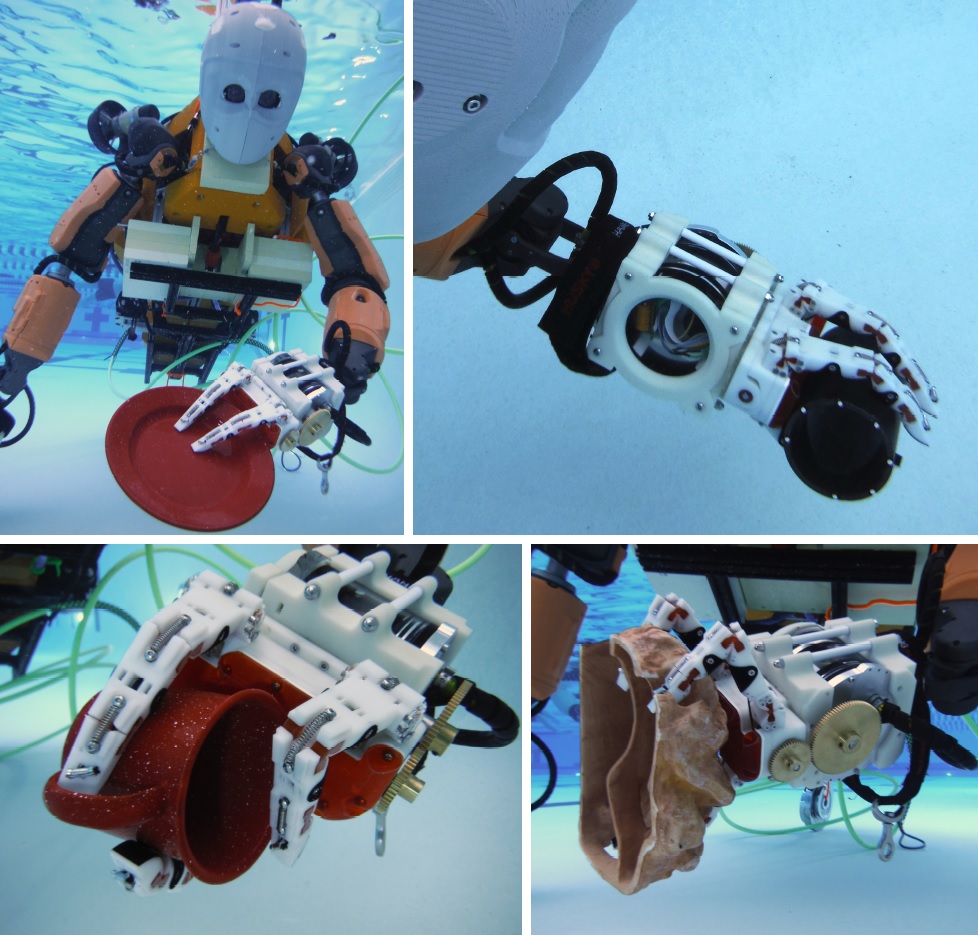 |
| A hand with a single actuator achieves multiple grasp types, relying on the compliance of the fingers and transmission. | The hand demonstrated on a mobile robot in the Stanford pool. |
| Attach:FourFingerHandGrasping.jpeg Δ |
| Fixed-base compliant fingers performing multiple grasp types. |
{kind=link}
Degressive spring geometry at the finger joints allows the fingers to pinch with straight fingers with, with large joint preloads, without sacrificing the grasp strength of the robot hand, or increasing the actuator torque requirements significantly [1].
| Attach:MGNonlinearGeoDiag.jpeg Δ | Attach:NonlinearGeoPlotSim.jpeg Δ |
| Simplified model for the nonlinear effects of changing tendon and spring geometry throughout the range of motion of the joint [1]. | Allowing the geometry to change with pose (aka not using a pulley with a fixed radius to guide tendons and springs) allows the joint to maintain a high preload (preventing saggy fingers) without deminishing the tendon tension needed to close the finger [1]. |
{kind=link}
{kind=link}
Light Suction Flow to Improve Object Acquisition and Retention
Light suction flow can increase the acquisition region for light objects [1], as well as improve the retention of slippery sample which is most important in pinching tasks through an increase in the static coefficient of friction [2]. Sensing suction flow using a pressure transducer to estimate flow rate is a way to detect tactile events and the engagement of suction on a surface [2].
| Attach:suctionConcept.jpeg Δ |
| (A) The object is not acquired becuase local flow around the fingertip pushes the object away. Although a fingertip with holes will decrease this effect (B), only attractive flow will counteract this negative phenomenon (C). [1] |
{kind=link}
To evaluate grasping performance of the hand underwater more accurately, the dynamics of fluid and the hand need to be considered. We use the dynamic engine Moby with the python interface developed by D. M. Aukes which allows us to model all the relevant factors flexibly. In one of our simulations, we investigated the benefits of adding gentle suction at different locations on the fingers by including a simplified suction model into the simulator. Grasp regions with varying suction locations was generated using the simulator. This video demonstrates one possible way in which light suction flow can improve grasp success: https://www.youtube.com/watch?v=qzwbfYv1GqA
| Attach:HandDesignWithSuction.jpeg Δ Attach:TubesAtJoints.jpeg Δ |
| Suction tubes can double as passive spring elements in the hand [2]. The analysis conducted so far is for suction at the fingertips, future work will look into how suction at different locations could also help in manipulation tasks. |
{kind=link}
{kind=link}
[1] Stuart, H.S., Wang, S., Gardineer, B., Christensen, D.L., Aukes, D. and Cutkosky, M.R., "A Compliant Underactuated Hand with Suction Flow for Underwater Mobile Manipulation," IEEE/ICRA 2014 (preprint).
[2] Stuart, H.S, Bagheri, M., Wang, S., Barnard, H., Sheng, A.L., Jenkins, M., Cutkosky, M.R. "Suction Helps in a Pinch: Improving Underwater Manipulation with Gentle Suction Flow," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015. (preprint Δ)