
TRI2.0
April 2021: We have a new project in collaboration with the Stanford IPRL under Prof. Jeanette Bohg and with several TRI researchers to extend and integrate some of the work started under TRI1.0 below. We want to use tactile sensing -- not only on the nominal grasping areas but on the backs and sides of hands and arms as well -- to acquire and manipulate objects in cluttered environments.
- New site for tactile reaching in clutter: Tactile-Informed Action Primitives
- Meeting notes (Googledoc visible to Stanford)
- shared folder
On this page... (hide)
1. Distal Hyperextension Hand
While kitchen tasks such as clearing the table after a meal or loading the dishwasher are commonplace for humans, they pose many challenges for robot manipulators. Objects in the kitchen come in a wide variety of shapes and sizes and exist in a wide variety of states. Over the course of a single day, dishware can go from clean and neatly stacked in a cupboard to slippery, dirty, and haphazardly piled in the sink. Operating in an environment as dynamic as a kitchen requires highly-mobile and versatile hand.
We present a novel end-effector designed for these types of challenging environments.
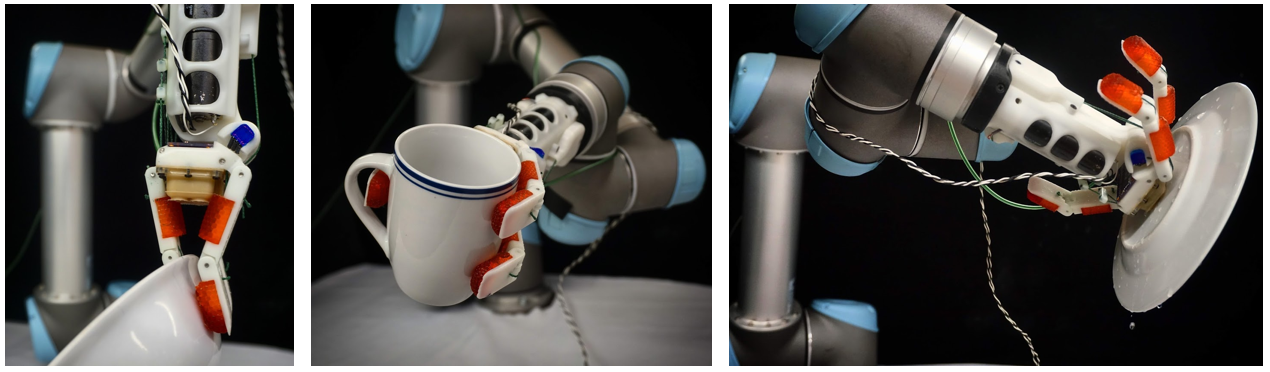 |
| (Left) Power pinch on the lip of a bowl enabled by distal hyperextension. (Middle) Enveloping grasp on a mug. (Right) Suction grasp on a wet plate using the particle jamming suction cup palm. |
1.1 Highly-Mobile Bending Wrist Joint
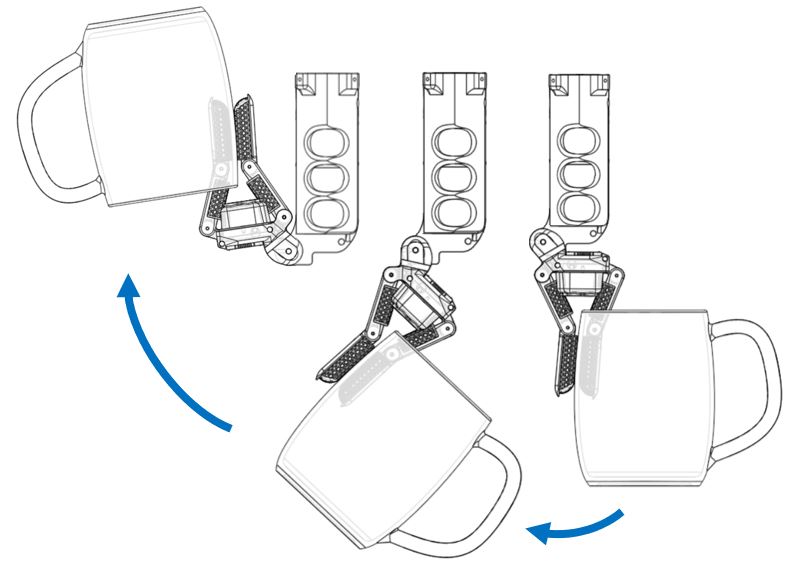 |
| The bending wrist joint allows for object reorientation without regrasping. |
It is common to see robot manipulators with a long distance between the fingers and the last bending joint. This is because most robotic manipulators are configured with a roll joint as the most distal joint and end-effectors themselves tend to be quite long in order to house motors and sensors in the wrist. This distance can significantly reduce a robot's achievable workspace. To better understand this point, imagine trying to remove items from a sink without bending your wrist.
To mitigate this problem, the end-effector presented here features a highly-mobile bending wrist joint adjacent to the proximal joints of the fingers. Not only does this increase the end-effector's workspace, allowing it to reach the corners of sinks, cabinets, and drawers, but it also allows for in-hand reorientation of objects without replacement. This type of reorientation is especially useful for tasks such as loading a dishwasher, as dishware needs to be placed upside down in the dishwasher rack.
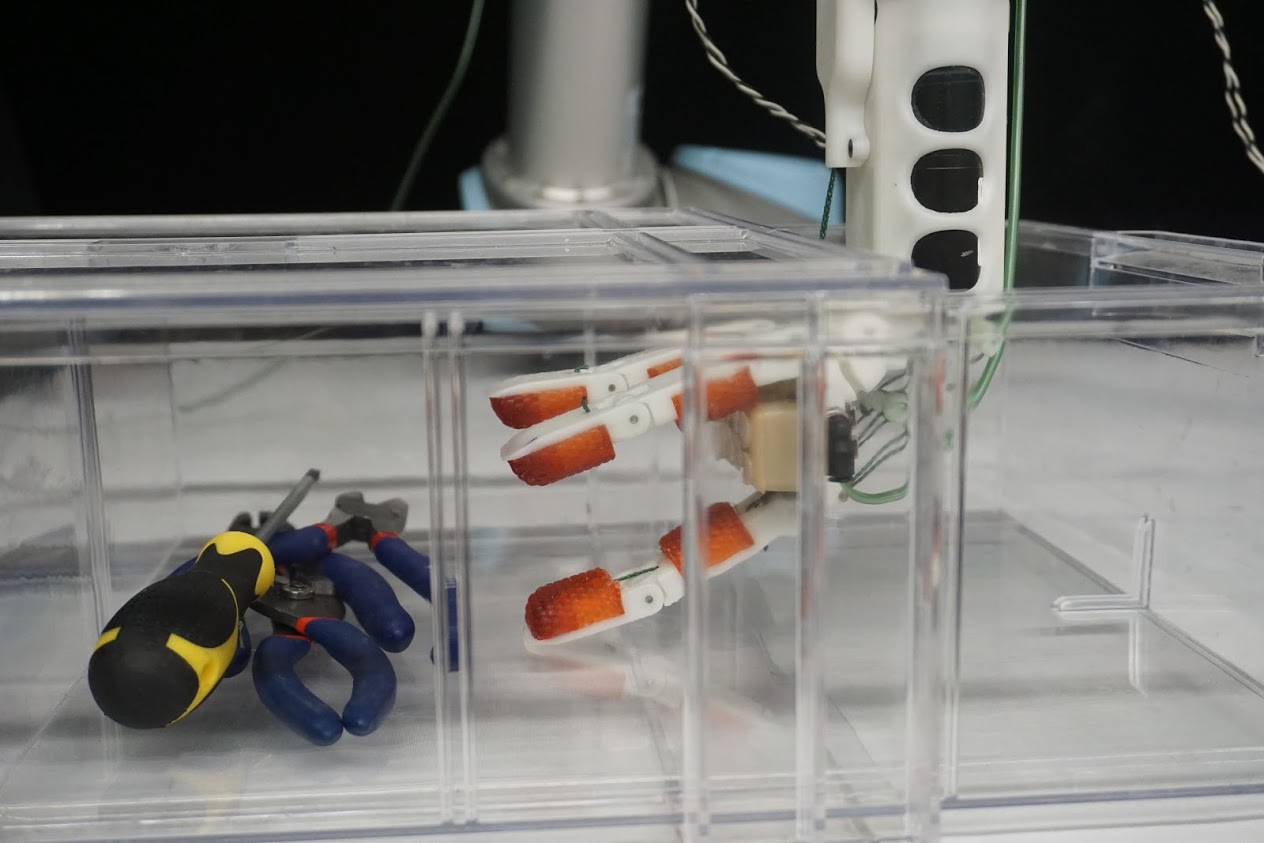 |
| The wrist joint allows the hand to reach into constrained spaces. |
1.2 Distal Hyperextension
The hyper-mobile bending wrist joints helps with the object acquisition and object placement steps of manipulation tasks, but success is hinged on creating a stable grasp. Keeping grasp forces low is essential when manipulating fragile objects such as wine glasses, but this is especially challenging when objects are wet/slippery, which is common for dirty dishes piled in a sink. The end-effector here addresses this challenge in two ways: (1) by using textured pads on the fingertips that have a high coefficient of friction on both wet and dry surfaces, and (2) by allowing the fingers to bend backwards (distal hyperextension) to increase contact when grasping objects of various shapes.
Distal hyperextension is often used by humans when pinching objects between their thumbs and index fingers, but is rarely seen in robotic grasping. It is especially useful when pinching the rims of convex and concave objects such as bowls and cups. In these cases, it distributes the pressure evenly across the entire finger pads, allowing for secure grasps with significantly lower exerted grasp force. We use the term "power pinch" to describe pinch grasps that make use of distal hyperextension.
1.3 Particle Jamming Suction Cup Palm
Objects in certain configurations, such as upside down bowls and plates, are difficult to acquire with a traditional fingered hand because the rims are no longer easily accessible. Award-winning entries in the Amazon Picking Challenge have found that the addition of a suction grasp modality often improves performance and, intuitively, suction could be useful for the edge-cases mentioned. However, conventional actuated suction cups would aspirate food and liquids. To avoid this messy aspiration, an array of closed, octopus-like suckers was added to the end-effector's palm to provide a suction grasp modality.
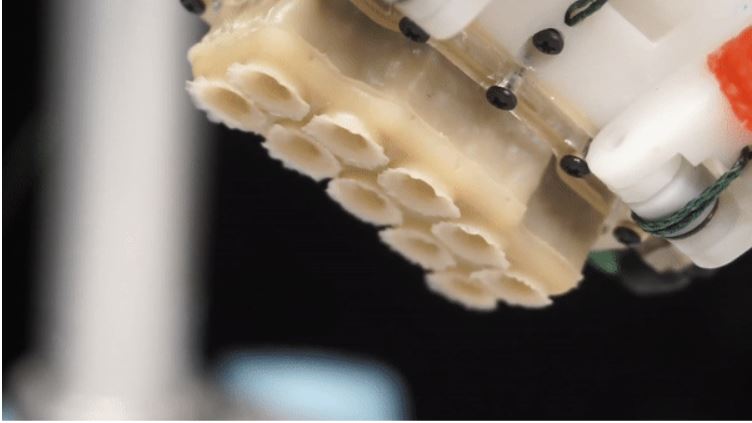 |
| A closed suction cup design prevents food particle aspiration. |
Compliance in the palm is necessary to conform the suction cup array to objects of various curvatures, but compliance is undesirable when applying load as the suction cups are allowed to peel off the surface. Using a particle jamming palm as the base for the suction cup array allowed for compliance when attaching the suction cups, but rigidity when applying load.
Check out the publications: MobileManipulationPubs.