MultiLimbedClimbing, MobileManip
On this page... (hide)
1. Spiny Hand information
1.1 Dimensions and CAD
 |
 |
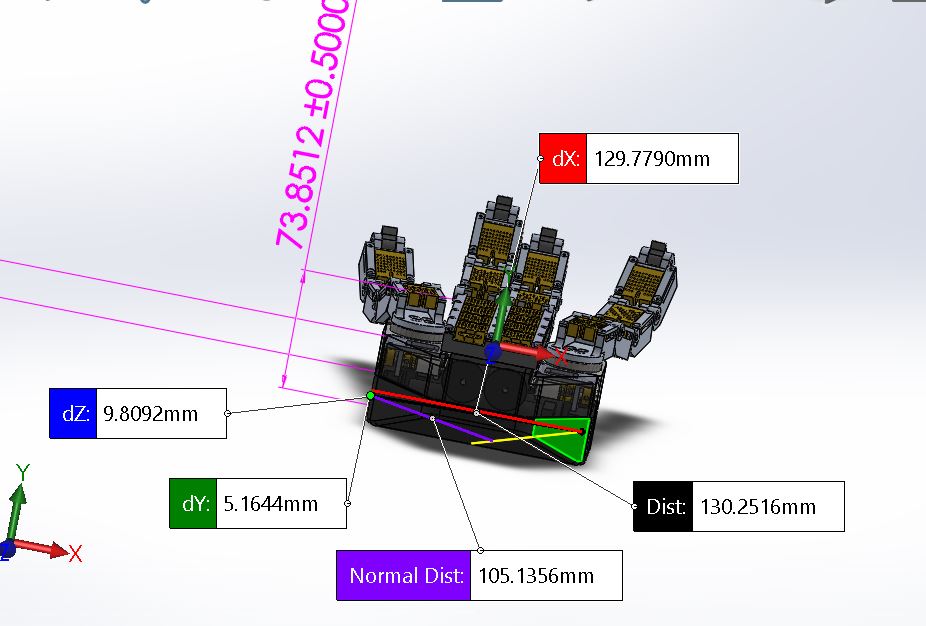 |
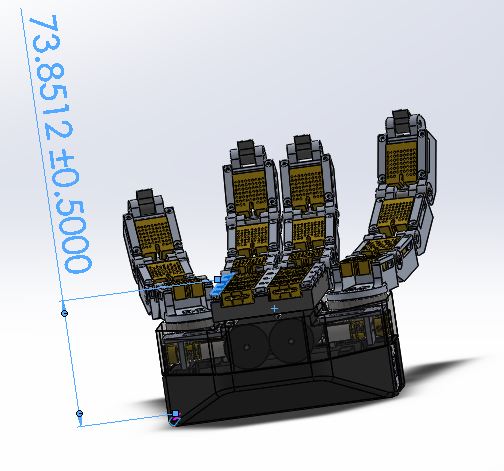
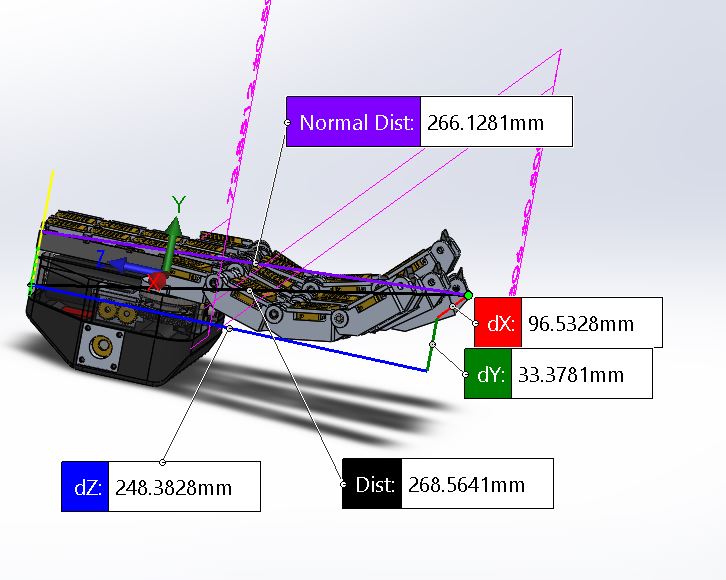
Click to enlarge
Folder with Solid Works CAD information:
General Info about spiny hand
1.approximate dimensions with hand lying flat Height: ~75mm, palm width: ~130mm (minimum), length with finger lay flat: ~300mm 2.hand control protocol
Probably need an 'L' bracket for mounting at ~right angle to RoboSimian. In this case watch for maximum moment on the load cell :-)
The sensor can be mounted 'distal' to the bracket to reduce moments.
Probably also need a break-away feature to protect the sensor.
Need to think about what motion path is best and what directions we will be applying loads. Downward and somewhat outward.
How many volts, peak amps (peak current much higher than steady state).
- 12 volts
- up to 20 amps briefly if all 4 motors stall simultaneously. Can control so that they stall one-by-one.
RoboSiminian supplies 100v @1.5amps. Need to convert.
1.2 Communications
- Matlab and Arduino
- People can send commands to Matlab via GUI (set pwm, curl/uncurl for all four ringers, and finger positions relative to each other)
- Matlab send command to Arduino/teensy via serial communication (USB cable)
- Equipment: Requires a computer to run Matlab GUI and a USB/serial cable to control the Arduino side/microcontroller
list of commands: