Symmetric Low Inertia Manipulator (SLIM)
Recent advances in robot policy learning leveraging large real-world datasets have made strides towards robots which can be useful in household spaces. However, the robotic manipulator platforms currently used are ill-equipped for the varied constraints of the home, limiting their use in realistically constrained and cluttered environments. We aim to enhance performance of these manipulators through the development of a new end-effector, SLIM, that increases mobility through wrist and finger joints, maintains a slender form factor for reaching into narrow gaps, and exhibits low end-point inertia to give a light touch during exploration.
This work builds on ideas explored in two earlier hand prototypes from BDML:
Based on the findings of these two hand prototypes, SLIM containts an integrated 2-axis wrist and reduces effective inertia through a series elastic actuation scheme.
Core Features:
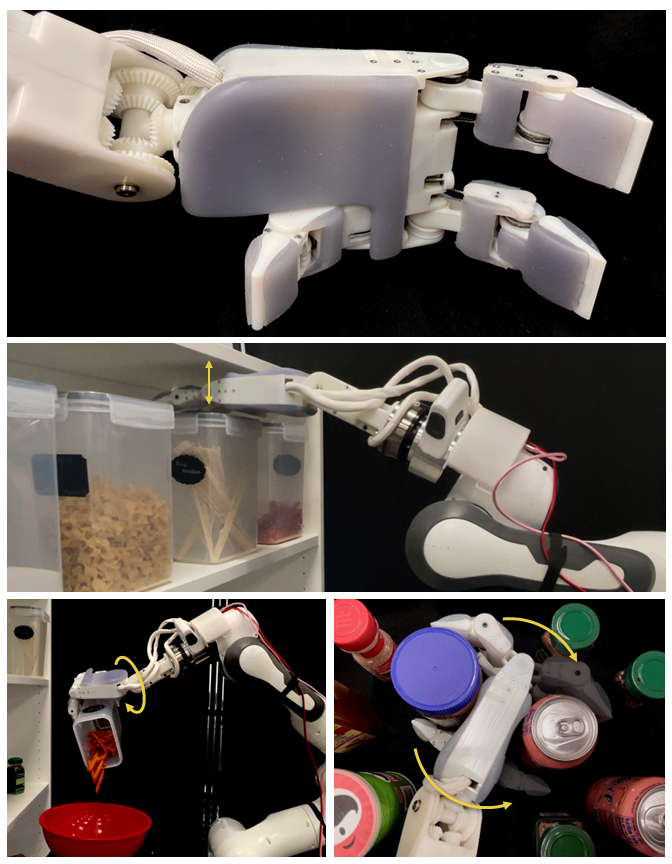
Integrated Wrist
SLIM integrates a 2-axis differential wrist that increases dexterous workspaces and reduces swept volume required for end-effector re-orientations. The wrist is easily replicable and instructions & CAD files can be found at: https://rthomasson23.github.io/slim_gym/
Thin Form Factor To achieve a thin form factor for reaching into narrow gaps, SLIM's opposing thumb tucks alongside the palm during reaching. This results in a form factor like an articulated paddle for maneuvering around obstacles.
Symmetric Actuation The fingers of SLIM's hand bend both ways, doubling the hand's grasp acquisition region and placing joint limits far from the nominal reaching configuration.
Linear Thumb Motion The opposing thumb is mounted on a prismatic axis, leading to a variable palm size for adjusting grasp width. This enables pinch grasps of thin objects, grasps of wide objects (such as a juice carton or tissue box), and strong grasps of tool handles for forceful use.
Series Elastic Actuation To achieve high sustained grasp forces while maintaining a thin profile, SLIM uses small, highly-geared motors for actuation. This is known to hinder the inertial benefit of distal degrees-of-freedom due to the high reflected actuator inertia. We decouple actuator inertia from finger inertia through series elastic actuation, leading to a light touch when exploring.
For More Information:
The CAD files for SLIM and especially its integral 2-DOF geared wrist are being published as open-source materials. We anticipate that the wrist will be of most interest to other groups because it is relatively easy to construct and, as we show in the accompanying paper, can provide substantial advantages even when paired with a commercial two-fingered gripper.
For those who wish to experiment with the dynamic simuation, or with variations on the SLIM design, we also post our simulation files in MuJoCo.
GitHub repository: https://rthomasson23.github.io/slim_gym/