Categories: MultiModal, Perching, BioinspiredRobots
SCAMP: The Stanford Climbing and Aerial Maneuvering Platform
Combining flight with the ability to climb is an idea that's at least as old as Archaeopteryx, but one that artificial systems have only now been able to achieve. The Stanford Climbing and Aerial Maneuvering Platform, or SCAMP, is the first robot that's able to fly, passively perch, climb, and take off. It operates outdoors on rough surfaces like concrete and stucco, using only onboard sensing and computation. In this video, we show off some of SCAMP's features, including new ones unique to its hybrid capabilities, like automatic recovery from climbing failure through timely application of rotor thrust.
(:youtube bAhLW1eq8eM width=560 height=315 scale=1 fs=1 hd=1 nocookie=1:)
 |
 |
|
SCAMP climbing the Stanford Clocktower |
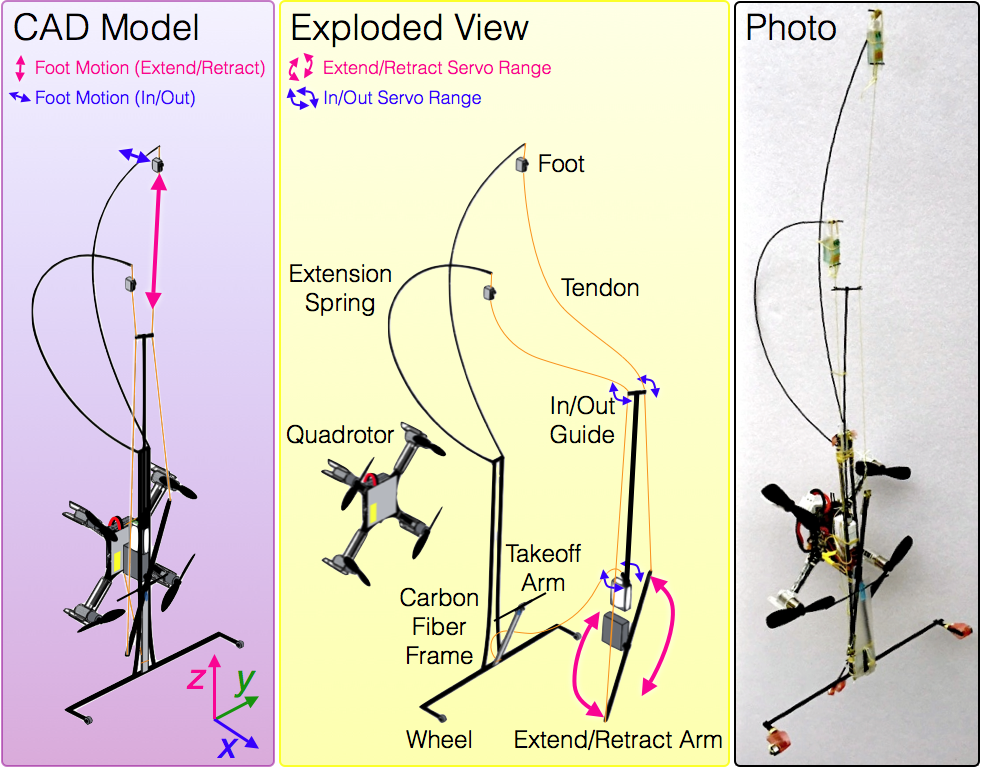
CAD model of SCAMP with exploded view and photo of robot. |
Perching can keep a quadrotor aloft indefinitely on a single charge; climbing allows us to precisely maneuver to the perfect spot for data gathering or communication. Making SCAMP required learning from all of our previous climbing robots and flipping our previous perching strategy on its head - literally. The result is a robot that's part woodpecker, part Daddy long-legs, and part hummingbird - the newest member of the BDML family of bio-inspired robots.
 |
 |
|
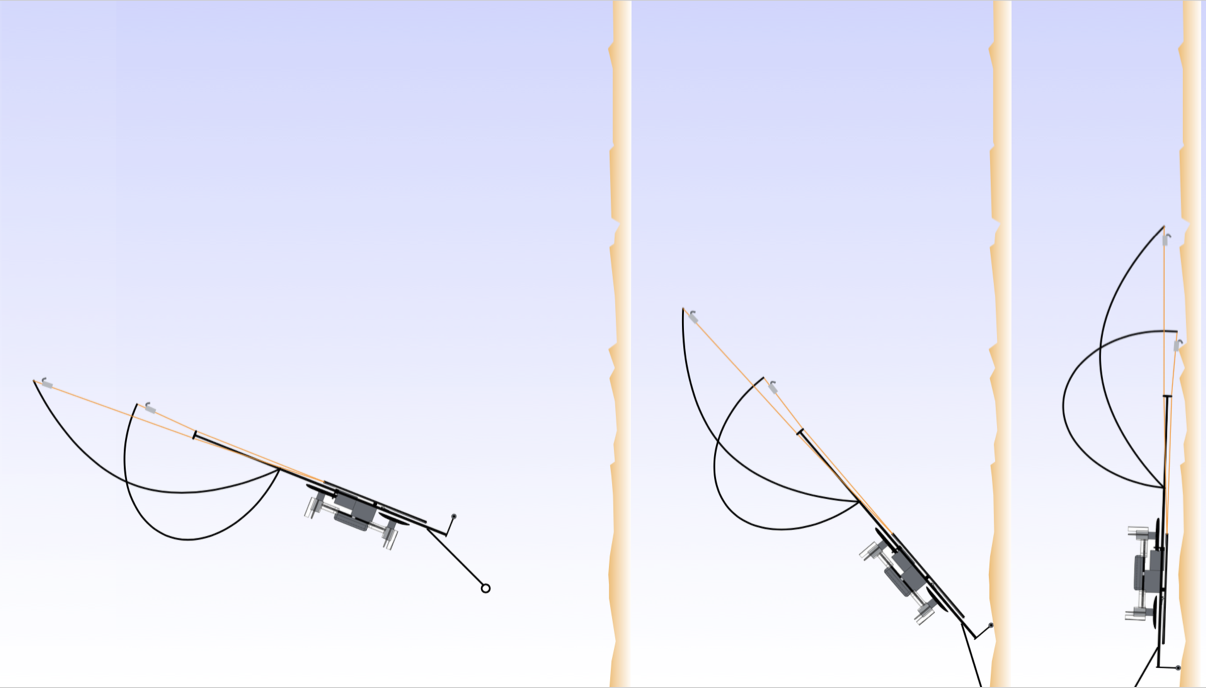
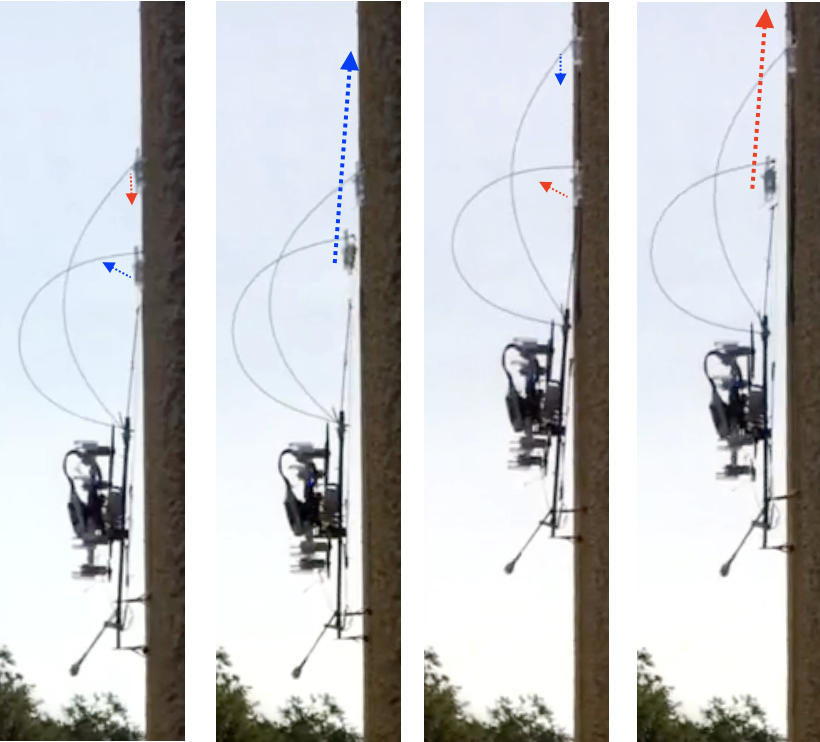
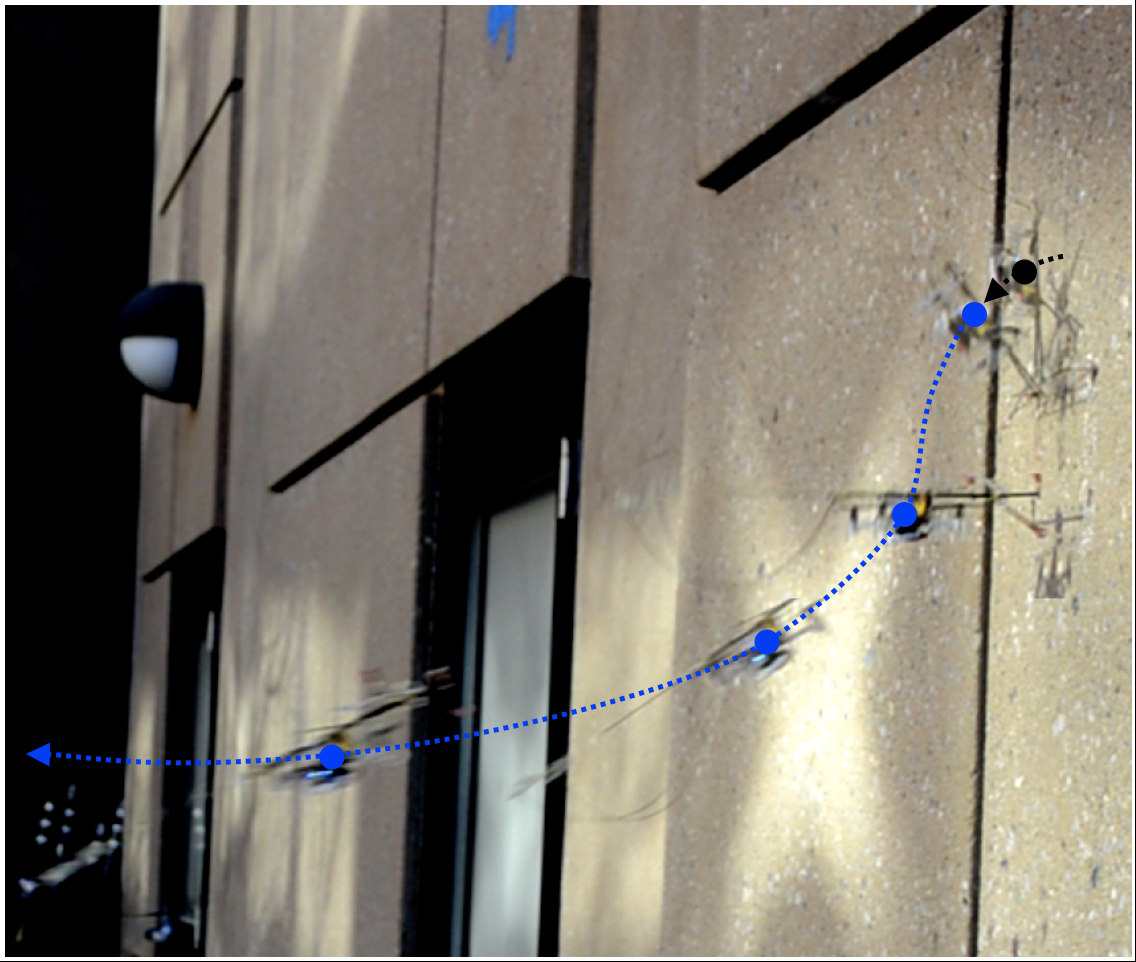
SCAMP's mechanically assisted perching strategy |
To perch, SCAMP flies tail-first into the wall. It detects the acceleration spike on impact and turns its rotors up to maximum. The tail acts as a pivot, and SCAMP attaches to the wall aerodynamically while its feet find good places to grip.
 |
 |
|
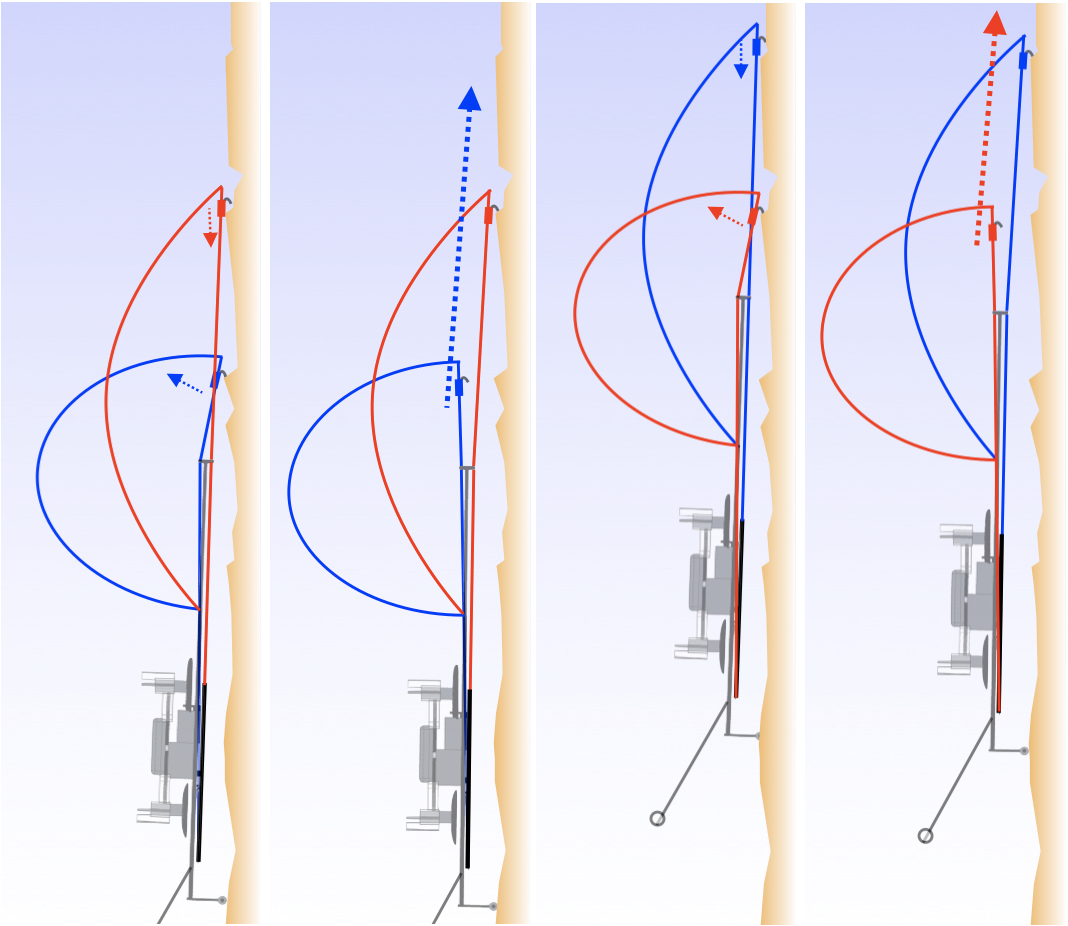
SCAMP climbs up the wall |
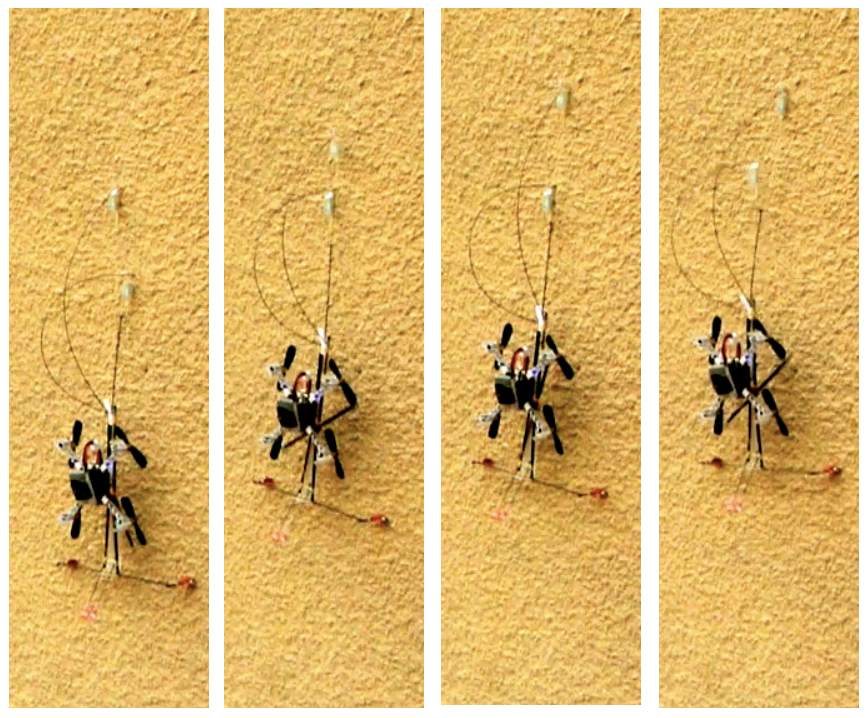
By alternating loads between its feet (shown here in red and blue), SCAMP is able to climb up the wall. SCAMP drags the unloaded foot along the surface until it engages a foothold. This removes tension on the engaged foot, which then releases.
 |
 |
|
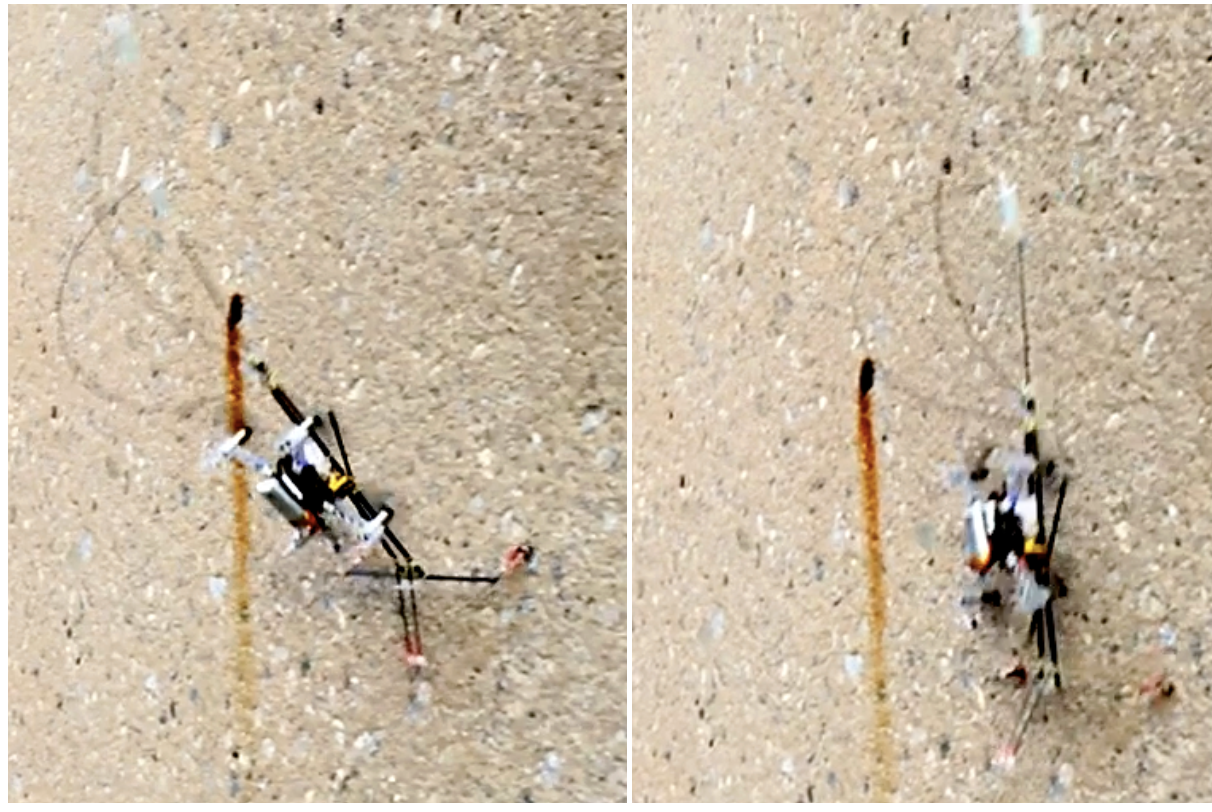
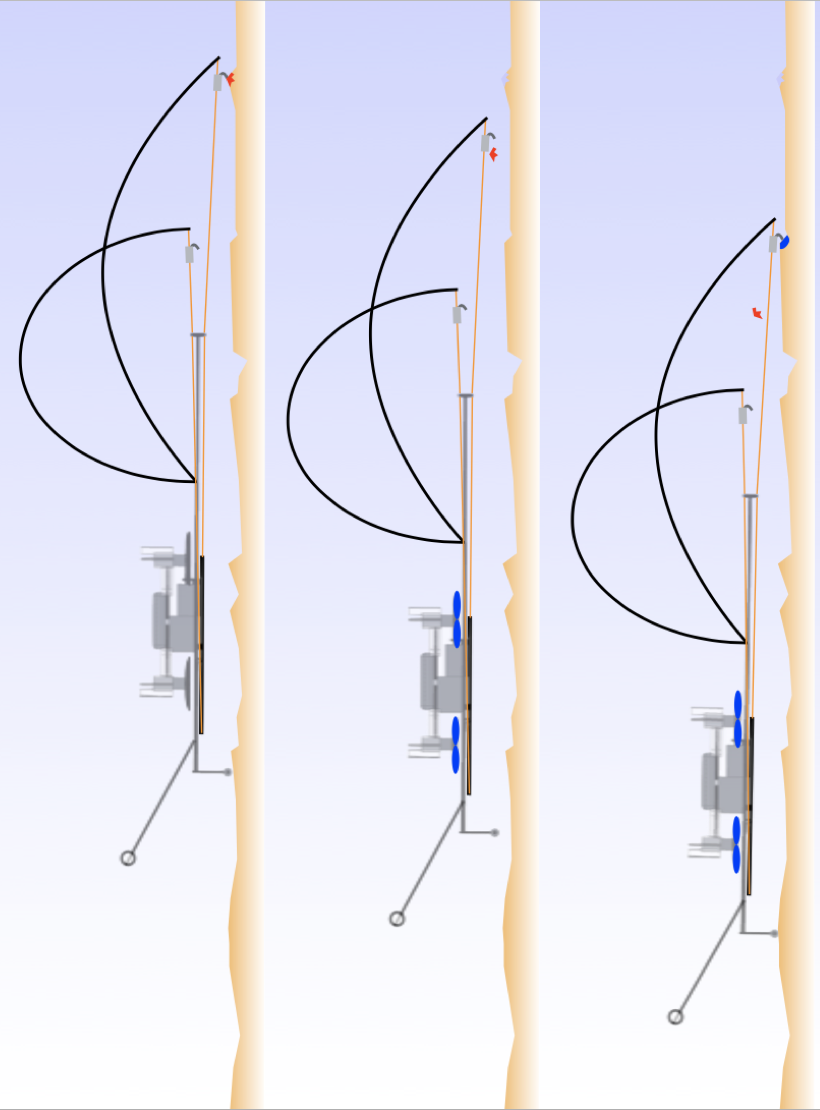
SCAMP's recovery strategy |
If SCAMP misses a step, its onboard accelerometers detect the resulting free-fall and the rotors spool up to gently push the robot back onto the surface. Its feet then re-engage with the wall and it can resume climbing.
 |
 |
|
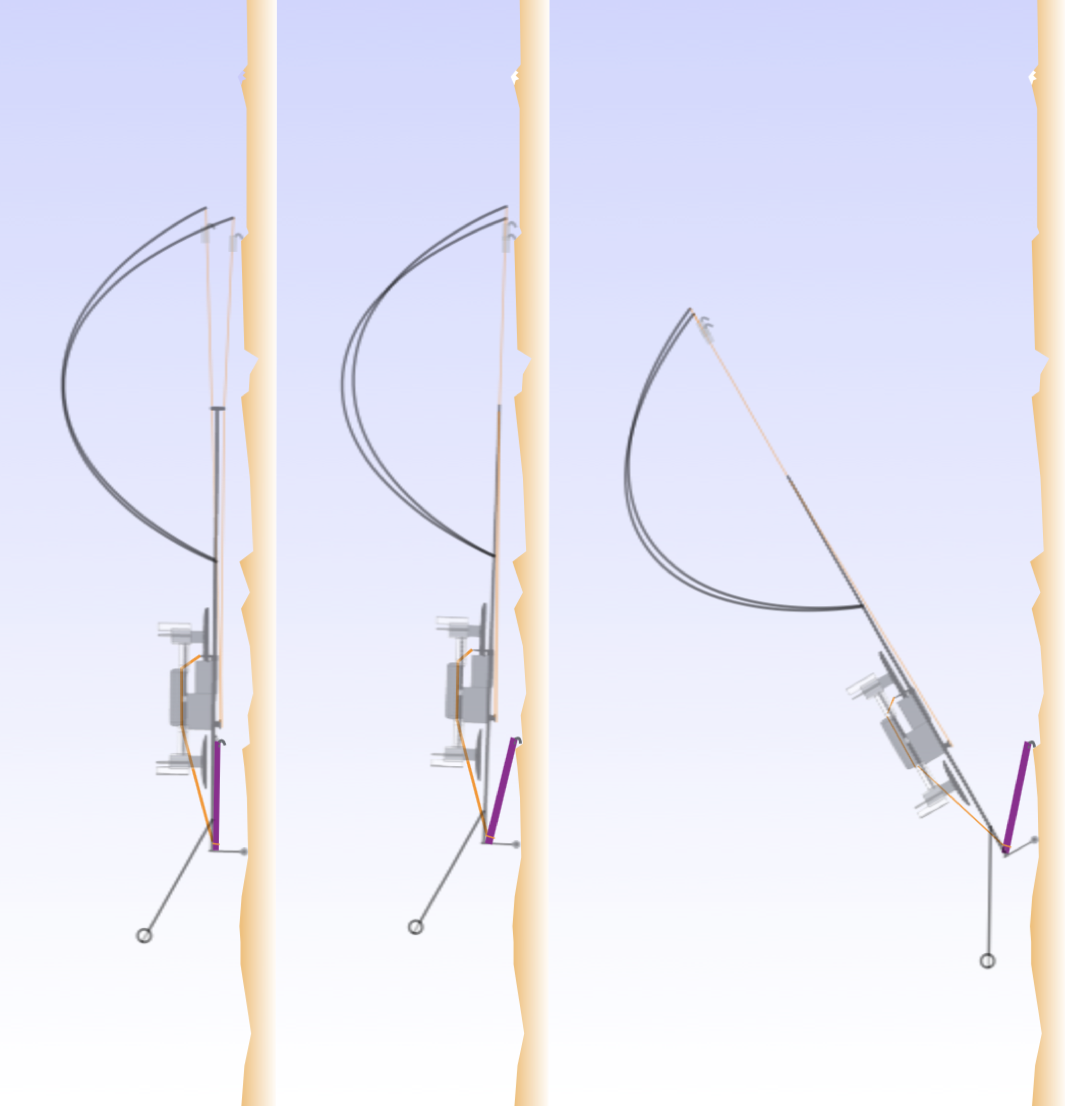
SCAMP returns to flight using a mechanically assisted rotation |
When SCAMP is ready to resume flight, it rotates its servos to a special position (not seen during normal climbing) to deploy a "takeoff spine". When load is transferred from the engaged foot to this spine, it rotates SCAMP away from the surface. Once SCAMP has tipped back a few degrees, the rotors start to spool up to normal flight levels and the robot can resume aerial operation.
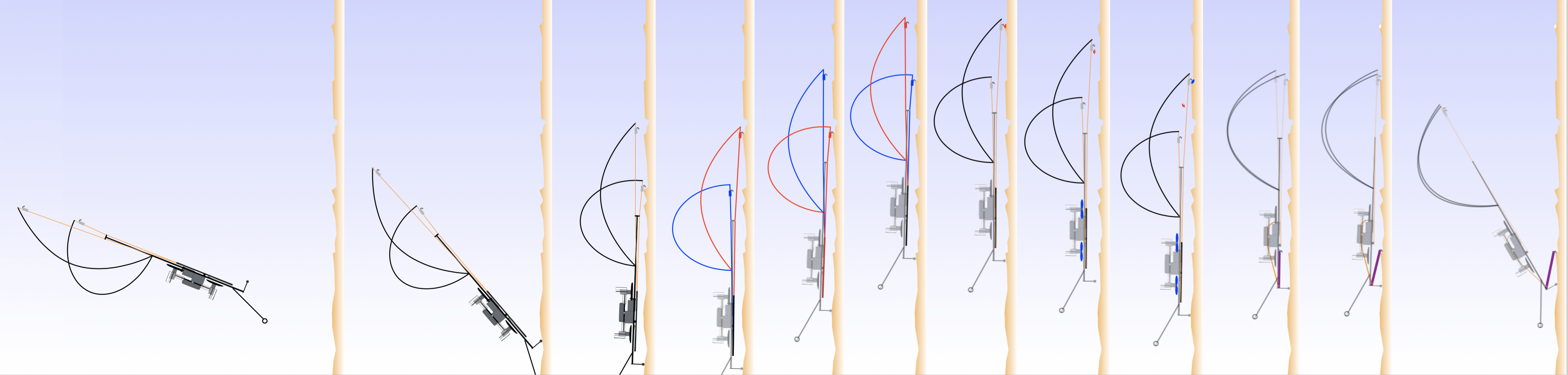
| Illustrated sequence of perching, climbing, failure recovery, and taking off |
Contact: Morgan Pope mpope [sticky] stanford [bot] edu
Videos
In the news
Check out our introductory article on SCAMP in IEEE Spectrum!
More SCAMP coverage: Engadget (Video followup), NewsbeatSocial (video), Cnet, Slate, DailyMail, SimbleBotics, Nerdist, Mental_Floss, Technabob, TechXplore, IndustryTap, ZeeNews, Hitchhiker's Guide to Tech, Artificial Intelligence Online, Elektor Magazine, DamnGeeky, FayerWayer, EuropaPress, GenK, PCRevue, Futura-Sciences, Futurism, Slashgear, Drone360, TheApolloBox, and BitCraze.