ReachBot Lite (RBLite) is a smaller, lighter, and less expensive variant of ReachBot in which most of the extendable booms are replaced with cable tethers. This arrangement allows the robot to be supported by purely tensile forces, while retaining the majority of the ReachBot functionality in locomotion and manipulation. Each tether is affixed to the environment with a microspine gripper that is acquired, deployed, and released using an extendable boom. In this way a robot with just one or two steerable and extendable booms can attach and detach as many grippers and cables as needed to support the robot and withstand loads.
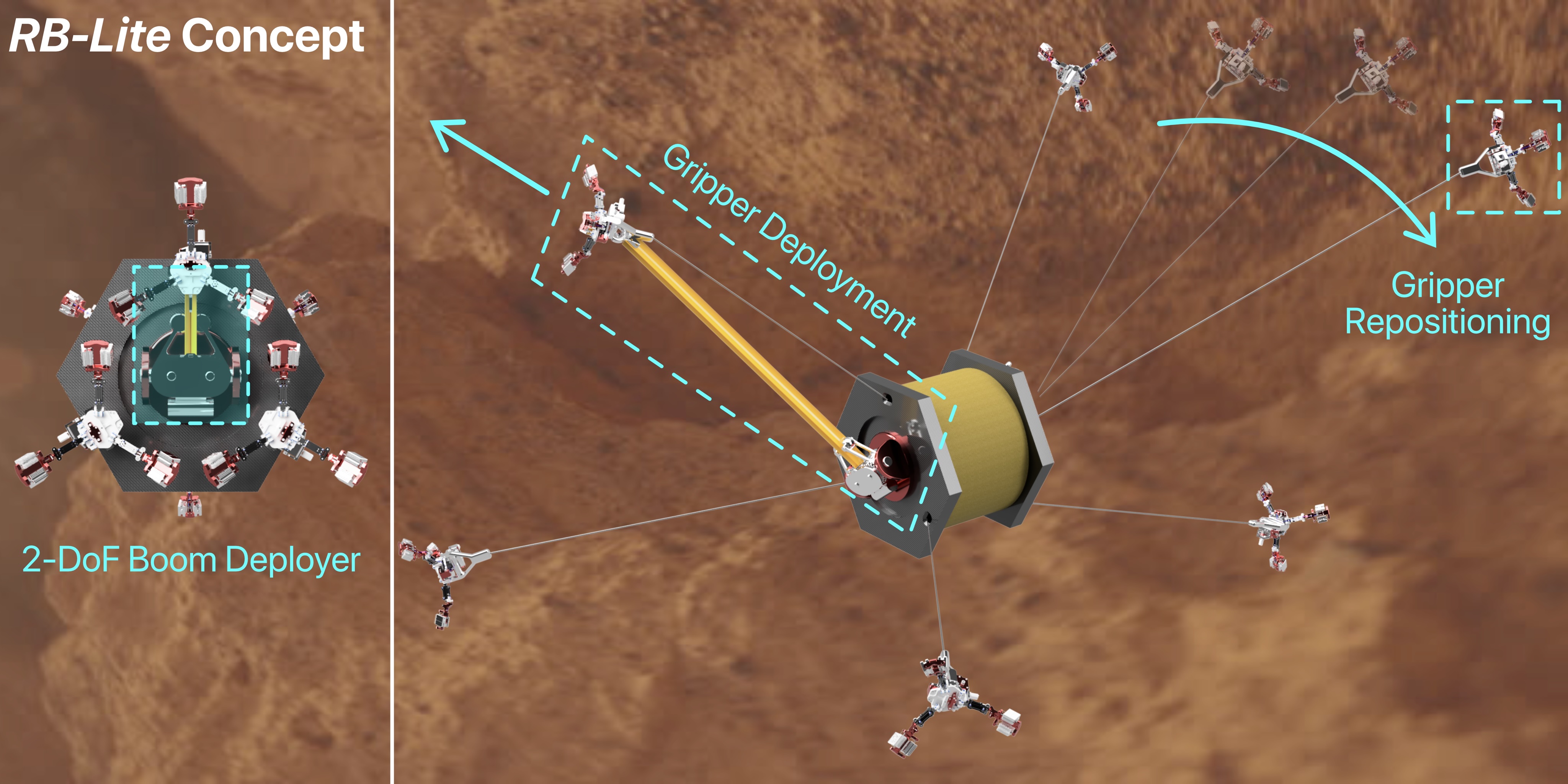
RBLite concept shown with two arms and eight cables
The operation sequence is:
- Boom retracts and pivots to engage a gripper stowed in a mounting location on the body.
- Boom extends and pivots, propelling the gripper away from the body toward a target. A winch pays out a cable which is attached to the gripper.
- The boom presses the gripper against a target site and the gripper closes to grasp it.
- The boom detaches from the gripper and retracts; meanwhile the winch tensions the cable as desired.
When it is necessary to release the gripper for reuse, the sequence is similar:
- The boom deploys and steers to connect to the gripper at the grasp site.
- The gripper releases and the boom retracts, bearing the gripper; meanwhile the winch retracts the cable.
- The boom deposits the gripper in its onboard docking location and releases it.
With the above operations, RBLite can perform most of the same operations as the original ReachBot, albeit more slowly. The chief advantage is that by replacing most of the arms with cables and winches the overall system can be considerably lighter, more compact, and less expensive.
RBLite prototype
 | 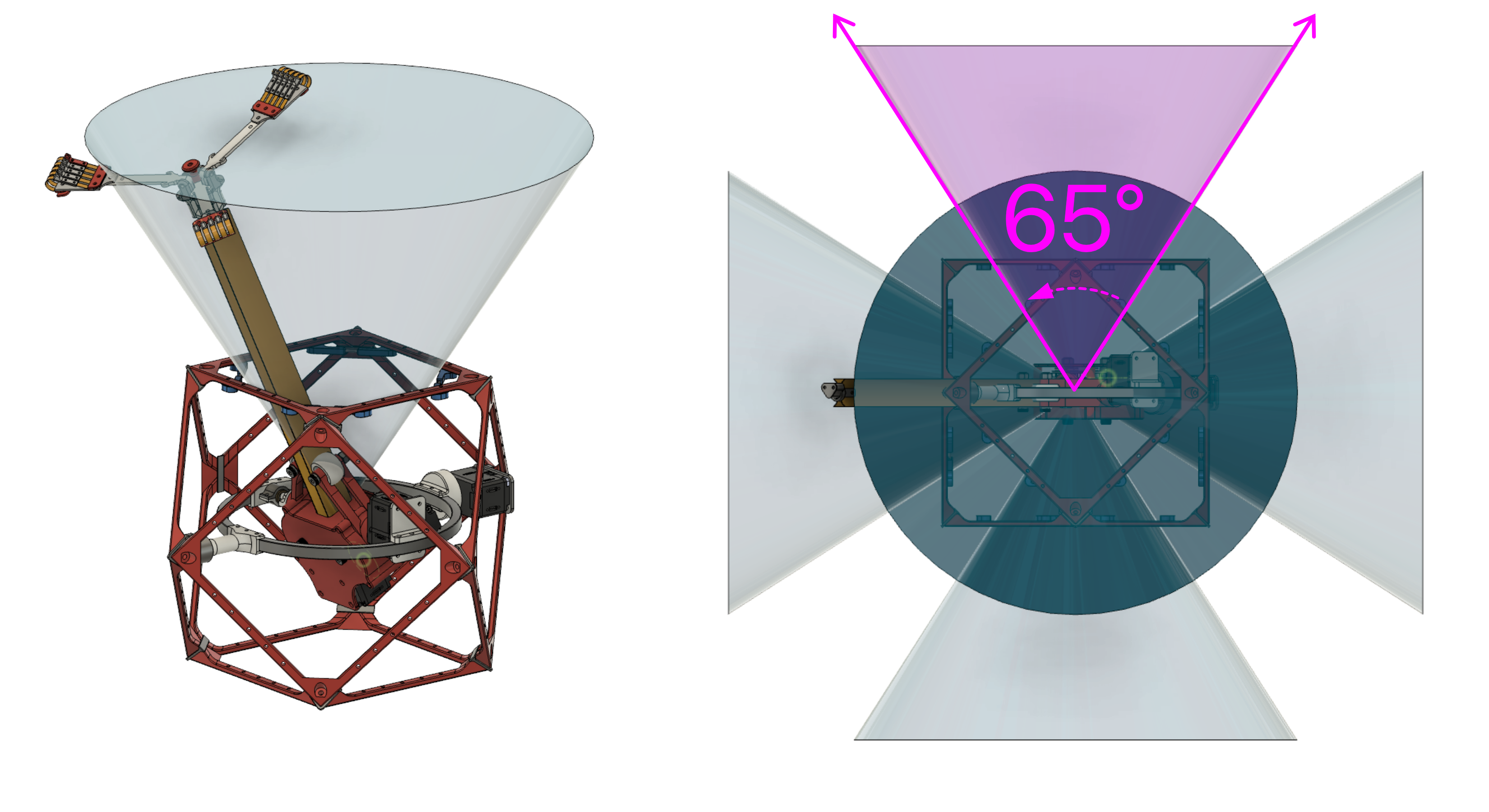 |
A minimalist prototype of RBLite is under development. In this implementation, the body is a compact cuboctahedron frame. A gripper with a cable tether is deployed from each of the six orthogonal faces of the body. At the center of the body, a single extendable boom is affixed to a gimbal, creating a 3 DoF manipulator for repositioning all six tethers.