- Video overview of the perching project made for ICRA 2010, including both landings and takeoffs
Youtube video
- A 1st rough take-off in Stanford Quad: using a modified version of the airplane
- Thrown glider landing and perching Filmed Dec. 2008, Edited June 2009 for UAV'09 (89MB Quicktime)
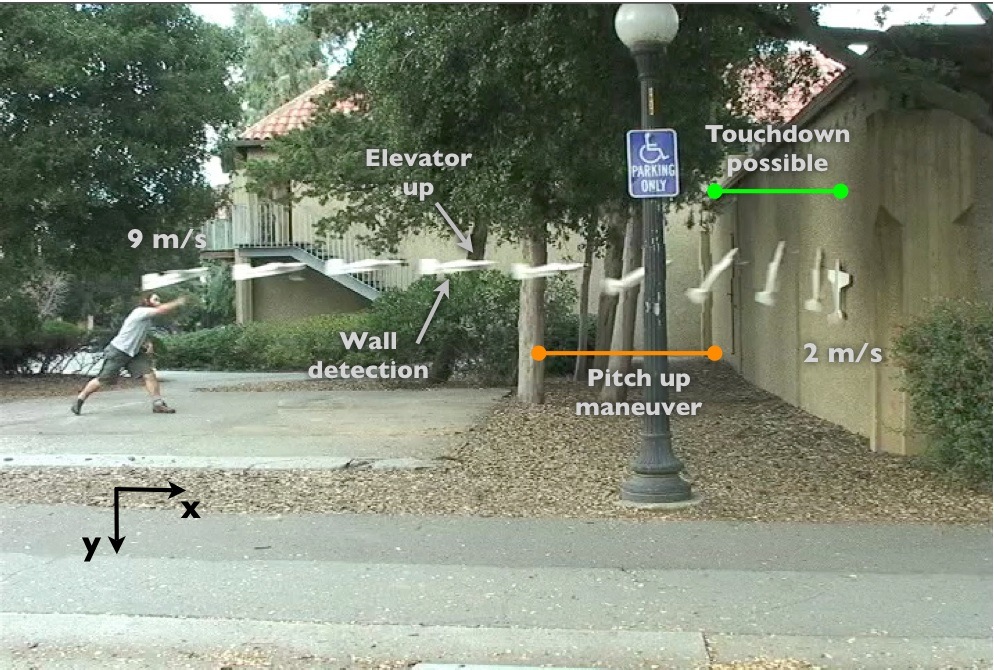
- Foam core glider is thrown at a rough concrete wall. Ultrasonic sensor initiates pitch-up maneuver at ~5m distance. Landing occurs while velocity is partly forward and partly vertical, between 1-3 m/s. Success was achieved for 30/40 throws, albeit under fairly calm conditions. For engaging and gripping the surface, we use a nonlinear suspension and a special adaptation of spiny toes from SpinyBot?
- One of the first image we have of perching. A very basic glider, manually thrown and controlled:
- Hovering with the Paparazzi open-source controller. We have achieved stable hovering with our small acrobatic plane:

Page last modified on December 10, 2013, at 11:30 am