On this page... (hide)
1. Introduction: Hands and Feet for Grasping Surfaces and Climbing
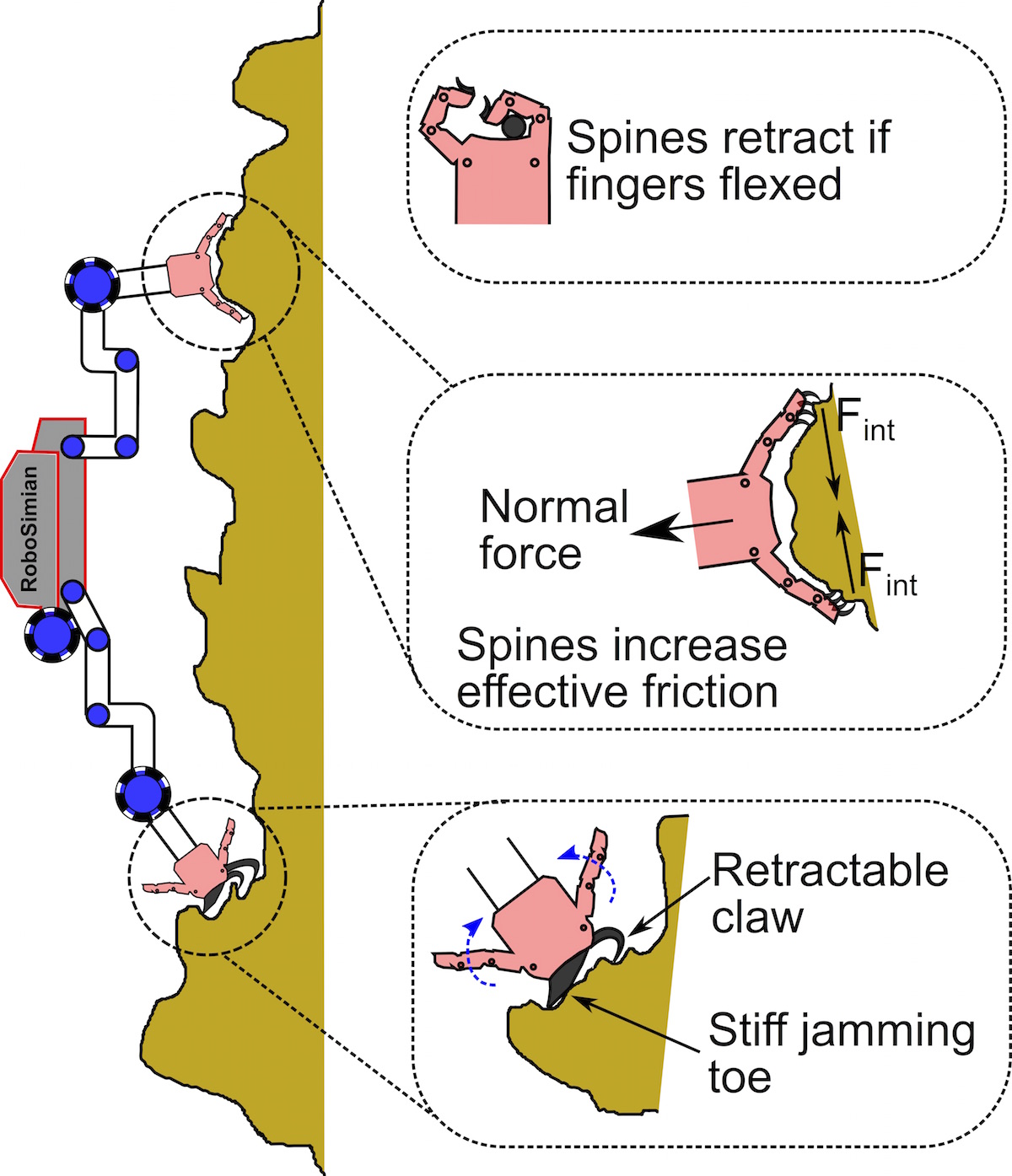
Concept of RoboSimian using hands,
spines and "hooves" on a cliff
This is a new NSF project in collaboration with Prof. Katie Byl at UC Santa Barbara and Prof. Kris Hauser at Duke University. The work is funded under the NSF NRI program: IIS-1525889.
The goal is to get RoboSimian to "manipulate" itself of challenging rock surfaces, including vertical cliffs, using a combination of bio-inspired hands and feet for grasping such surfaces and new motion planning algorithms for climbing. Where necessary, the robot will also use specialized climbing tools, as human rock climbers do. BDML is primarily responsible for the new hands and feet, including associated sensors. Please contact ShiquanWang if you are interested in the project.
2. Basic Methods
The original RoboSimian hands were developed at Stanford for JPL and were designed for grasping objects and for walking � because each limb can be either an arm or a leg. However, they were not specialized for climbing. Hence we will modify the design and provide the hands with tools adapted from those that human climbers use.
As a starting point, we note that a climbing multi-limbed robot and a grasping multi-fingered hand share some similar requirements for kinematics, gaiting and force distribution. In both cases it is important to con- trol internal forces to maintain stability. However, the internal forces for a climbing robot will be primarily parallel to the surface rather than normal and directed inward. On rough surfaces, the robot may be able to exploit enough handholds to stabilize itself and climb. On surfaces with fewer or smaller features, it can use specialized climbing tools, and spine-assisted grasping.
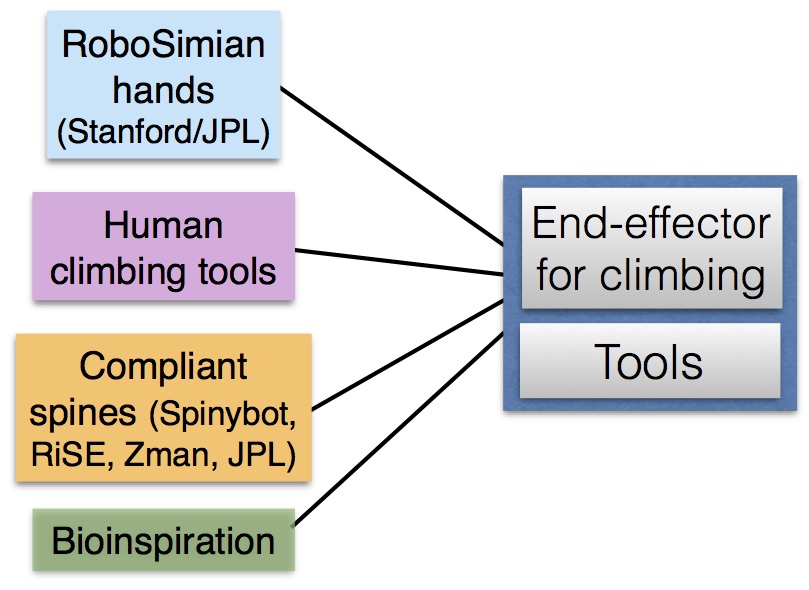
Basic strategy for end-effectors design
3. Spine Technology
Spine technology was originally developed at Stanford for Spinybot (Spinybot video) and RiSE to climb exterior building surfaces and subsequently adapted to human-scale climbing under the DARPA Zman project and to grasping rocks for space exploration at JPL.
3.1 Surface Grasping with Spines
The original biological inspiration came from tarsal spines on insect legs, which allow them to climb vertical walls of all but the smoothest materials. Once a spine has latched onto an asperity, it can sustain loads mostly parallel to the surface but also up to 20deg; outward from the surface. Hence, spines can supply the necessary inward normal force for climbing vertical surfaces and preventing a robot from pitching over backward.
The proposal for RoboSimian is to use larger spines than used for RiSE or ZMan; accordingly, RoboSimian will not be able to climb featureless concrete walls. However, with spines having a tip radius on the order of 100μm RoboSimian should find many asperities on rough rocky surfaces. These larger spines will be much stronger (strength increases with the square of spine dimensions). In addition, they will be provided with an overload protection, adapted from RiSE, so that they slip off asperties as loads become excessive. With these design considerations we predict that approximately 10 spines per digit will be appro- priate for the modified hands.
3.2 Feature Grasping with Spines
One of the most effective uses of spines on the distal regions of the digits will be to increase the effective coefficient of friction. Preliminary tests at Stanford indicate that the effective coefficient of friction can increase from approximately 0.5 to 2.0 for grasping convex protuberances on a rocky surface. For small protuberances, the hand can wrap around the rock and achieve a substantial internal grasp force in the usual way. However, for gently curved surfaces (e.g., 10 cm radius and greater) spines can help substantially - a moderate increase in the coefficient of friction substantially decreases the necessary wrap angle.
3.3 Jamming
RoboSimian is symmetric, and its end-effectors are both hands and feet. When functioning as feet, they again benefit from a high coefficient of friction, but they do not need to provide a pull-in force to prevent the robot from pitching back. At present, the RoboSimian fingers can hyperextend so that the robot walks on its palms. We will replace the palms with a high friction material with a stiff backing with somewhat sharp pro- trusions, similar to the hooves of a goat, to adapt them for jamming into crevices for climbing. A similar approach has been investigated for prosthetic feet for am- putee climbers.
A final potentially important revision is to equip the end-effectors with compliant, but lockable wrists or ankles - the prowess of goats in climbing steep rocky surfaces is partly due to their ankle flexibility. Damped, compliant ankles were also important for aligning the feet of the RiSE robot to surfaces.
3.4 Tool Use
We will adapt human climbing tools to the RoboSimian fingers and position them in a �tool belt� where they are easily accessible. Examples include clamps and wedges. However, stopping to acquire, position, release and restow tools is tedious. For many surfaces we anticipate that modified hands with claws or spines will suffice.
3.5 Sensing
The most direct way to assess properties like surface texture, hardness, coefficient of friction and friability (how easily the rock surface crumbles) is through direct contact. Spines are styli, and ideally suited for establishing these properties if instrumented with force sensors, as they drag slightly on the surface prior to latching onto asperities. It is also possible to add rugged pressure sensors to the palms (e.g. Flexiforce or the Harvard Takktile sensors as investigated for the original RoboSimian hands). The compliant ankles will be instrumented with Hall effect sensors to monitor surface orientation. In addition, the RoboSiman limbs are equipped with the usual force and joint sensors.
4. Recent Updates
4.1 New Design: Linearly-constrained Spine Mechanism
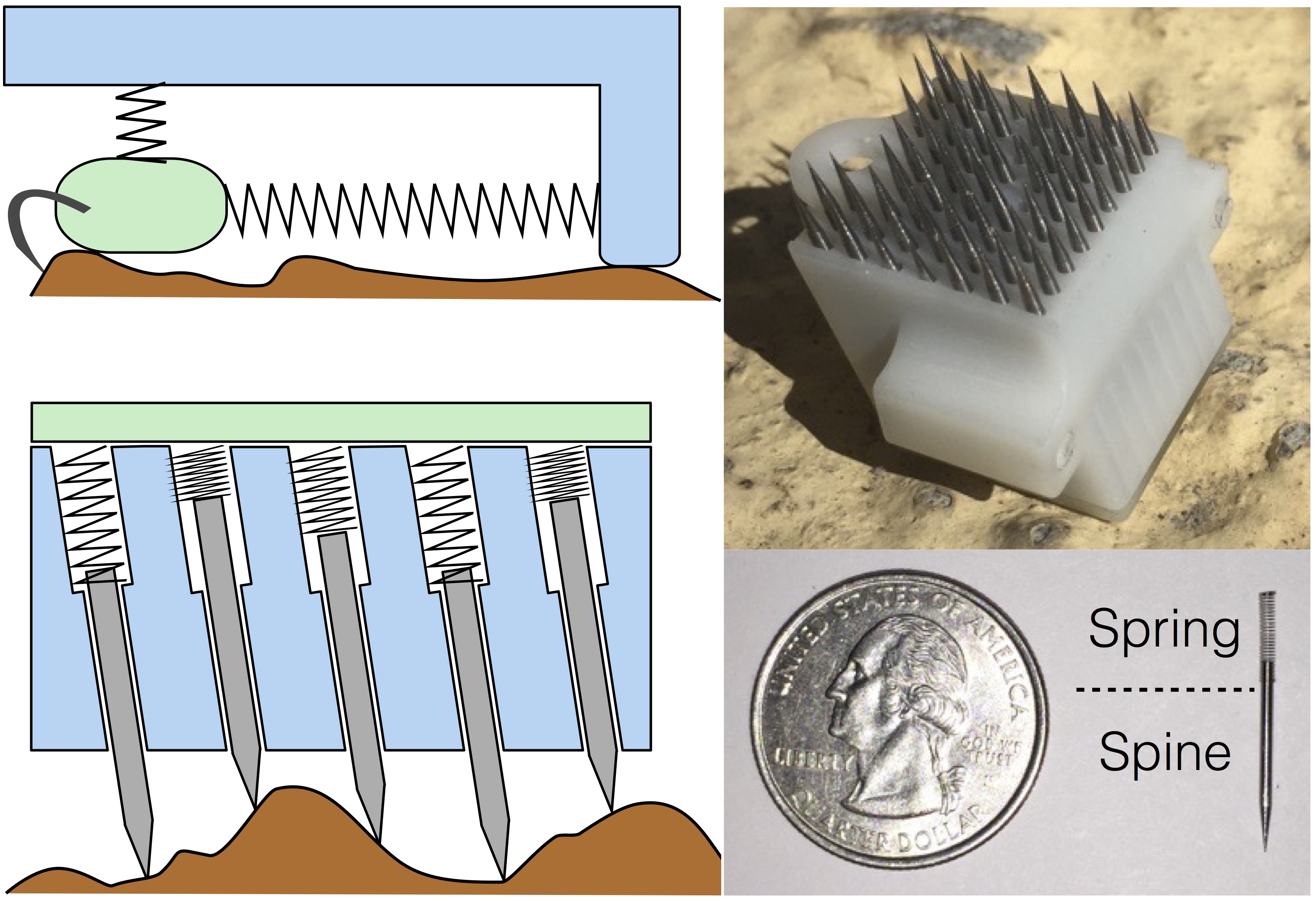
Comparison between old and new spine mechanisms.
Previous design that has been used in SpinyBot has flexure suspension which causes contact compliance that is not desirable for rock climbing application. Each spine has limited travel range normal to surface and cannot conform to terrain with large surface variation. To address these disadvantages, we came up with a new mechanism design. The spine body is used as a slider that travels in a tubular cavity, angled with respect to the surface normal. A soft spring element located within the sliding channel helps to press the spine against the contact surface. This mechanism is approximately equivalent to previous spine design with almost rigid tangential flexures and no potential for bending rotations. However, it is much more compact. The percentage of engaged spines is lower than for the previous flexure-supported design but this limitation is compensated by a much higher spine density. Load sharing among those spines that have engaged is still approximately the same as in the previous design. With modeling and optimization (please refer to our IROS paper for more details), three to five times adhesion stress improvement was achieved by this new design.
4.2 Palm Design with Linearly-constrained Spine Tile
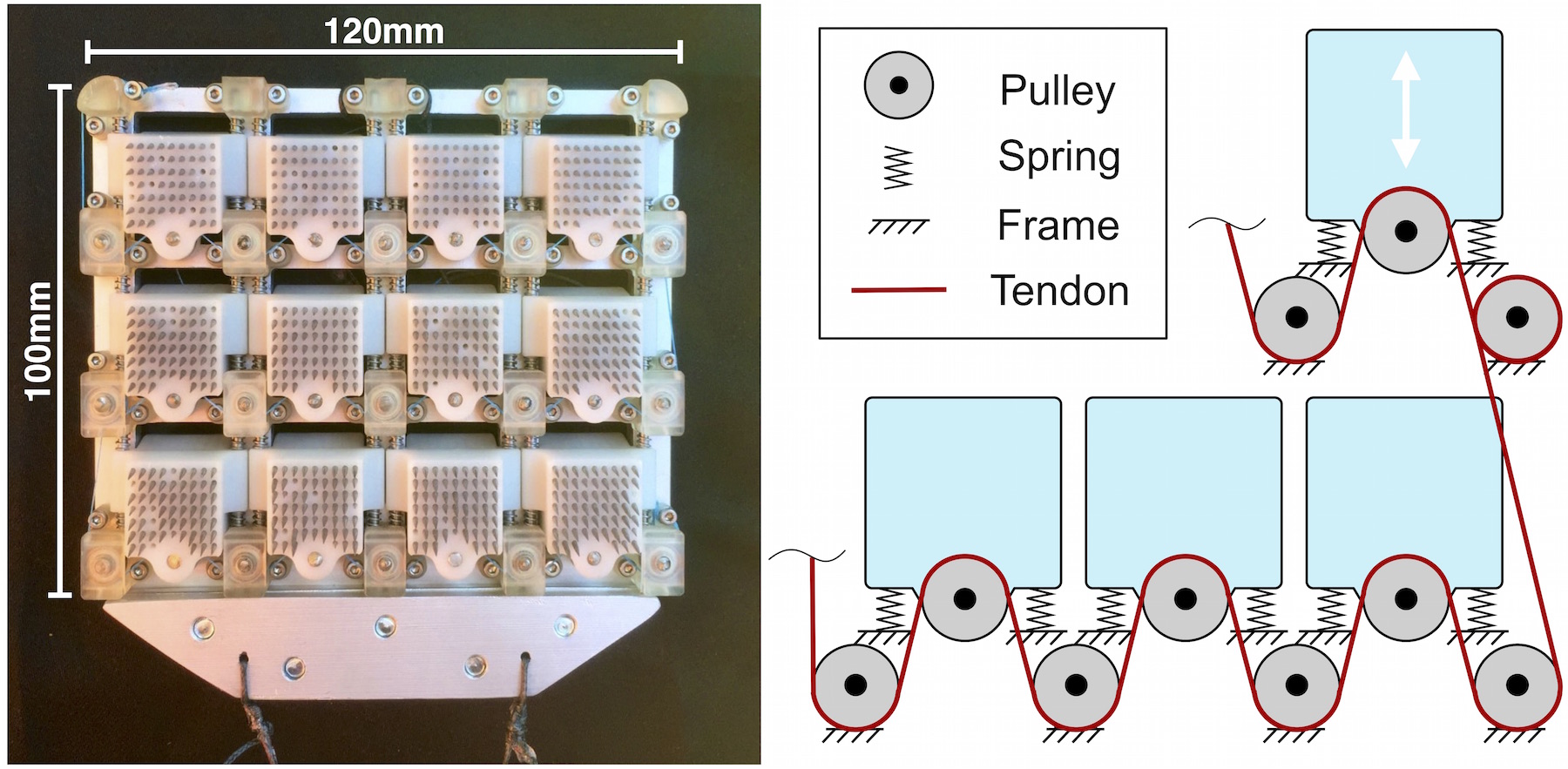 |
| Palm design based on linearly-constrained micro-spines tiles. |
Palm is the only part of the hand that has a large flat area, ideal for generating shear adhesion to support the body weight. The palm design consists of 12 spine tiles that can slide tangentially to engage with usable asperities. A pulley system with single tendon route around all spine tiles in series is used to guarantee even load distribution among the spine tiles. With modeling and optimization on tile configuration, we implemented a palm that holds up to 60kg shear load on concrete surfaces.
  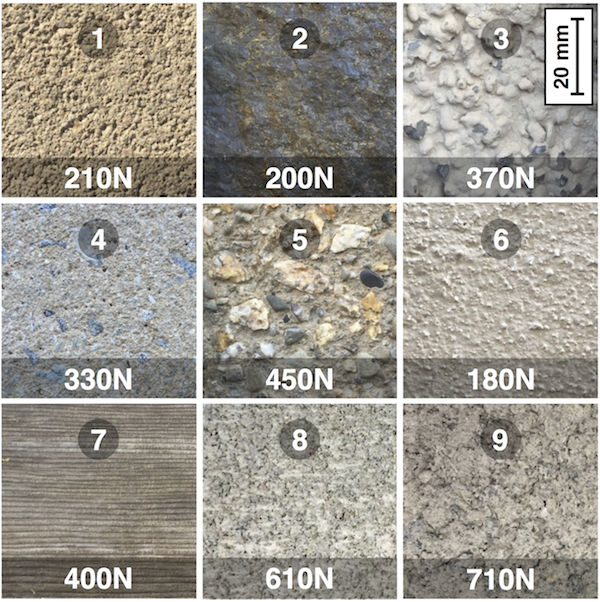 |
| Testing the palm with 45 lb shear load on two different surfaces and palm performance on 9 different surfaces. |
4.3 Spiny Hand Design
We are working on a new SpinyHand for RoboSimian.
5. Related Publications and Media
5.1 Hands and Grasping
IEEE Spectrum: Stanford's New Spiny Grippers Will Help RoboSimian Go Rock Climbing
5.2 Unstructured Terrain Traversing and Grasping
(from TerrainTraversingGraspingPublications)
MobileManipulationPubs#SpinyPalmPaper
Wang, S., Jiang, H. and Cutkosky, M.R., "Design and modeling of linearly-constrained compliant spines for human-scale locomotion on rocky surfaces," The International Journal of Robotics Research, Vol 36, Issue 9, pp. 985 - 999, Published online July 2017. DOI: 10.1177/0278364917720019
Wang, S., Chung, S., Khatib, O., Cutkosky, M.R. SupraPed: Smart Staff Design and Terrain Characterization, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015.
5.3 Media
- Prototype This filmed a climber scaling a cinderblock wall with our micro spine arrays: https://youtu.be/IpVB6gZrwdQ