Jump Gliding
The relationship of small robots and aerial operation is a complicated one. Because the air is relatively more viscous at the low Reynolds numbers they tend to inhabit, becoming a pure flying vehicle has some serious implications for energy usage and mission life. But because obstacles on the ground can prohibit effective forward motion, getting up in the air is sometimes very attractive. A jumping robot is one compromise, trying to blend the efficiency of ground locomotion with the mobility of aerial maneuvering. If you are jumping around, there is one more consequence of being small that you should consider - allometric scaling dictates that surface area to mass ratios will increase. This means that the extra mass cost of weight-supporting wings tends to become proportionally smaller and smaller as you decrease in overall size. We exploited this fact to create a jumping and gliding robot - a jumpglider.
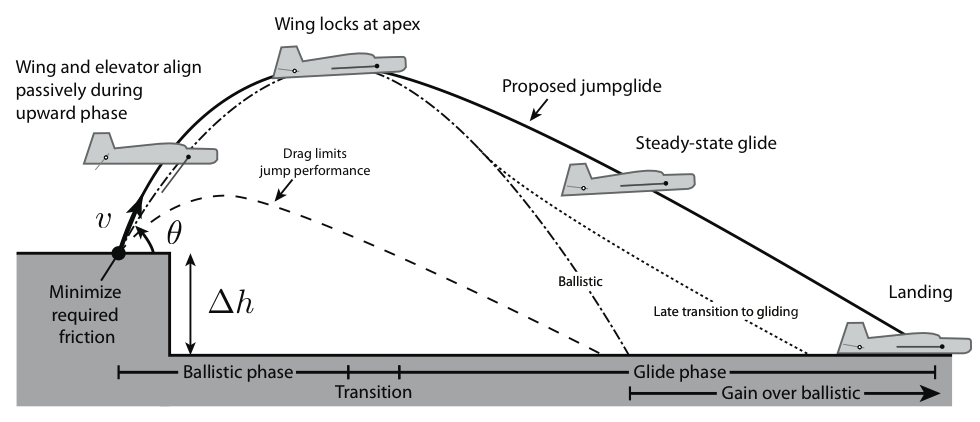
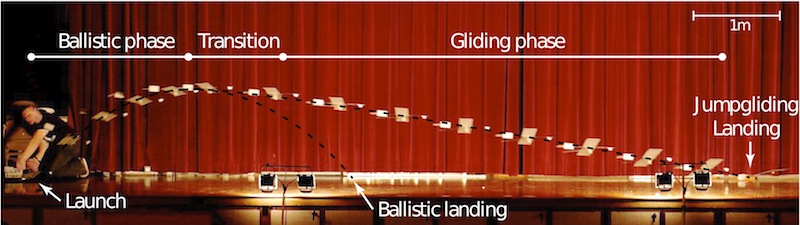
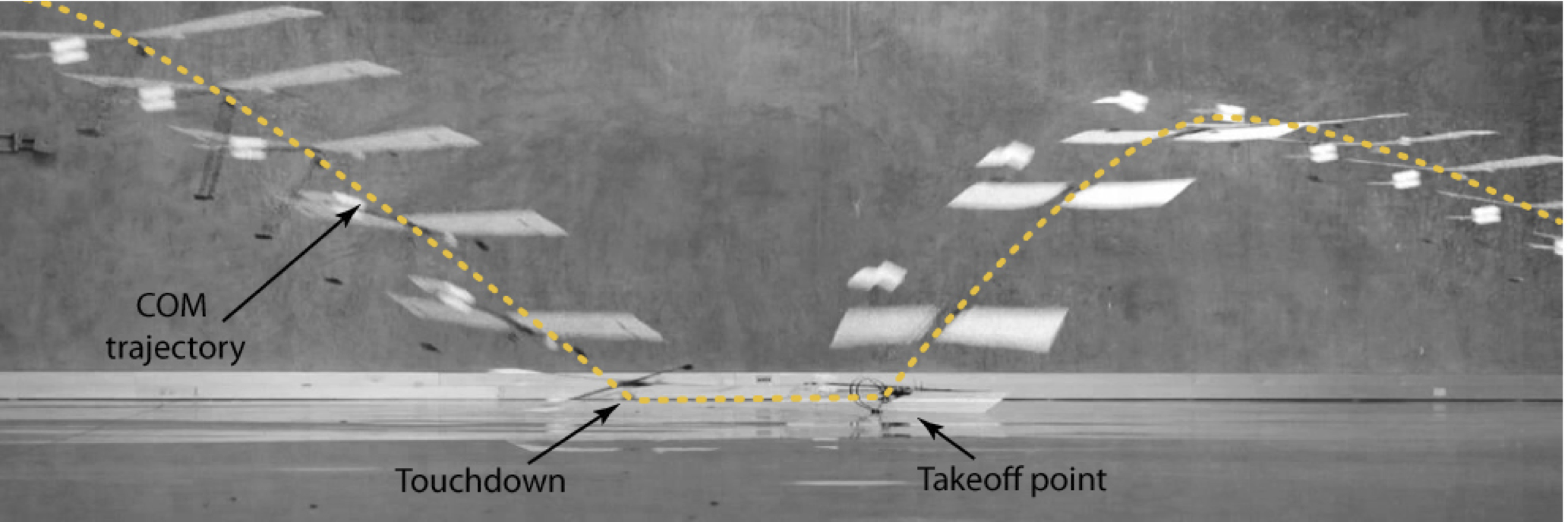
The basic strategy is to leap ballistically into the air - with the wings aerodynamically "off" - until the apex of the jump is reached, at which point the wings can be switched "on" and a stable gliding slope can be converged on.
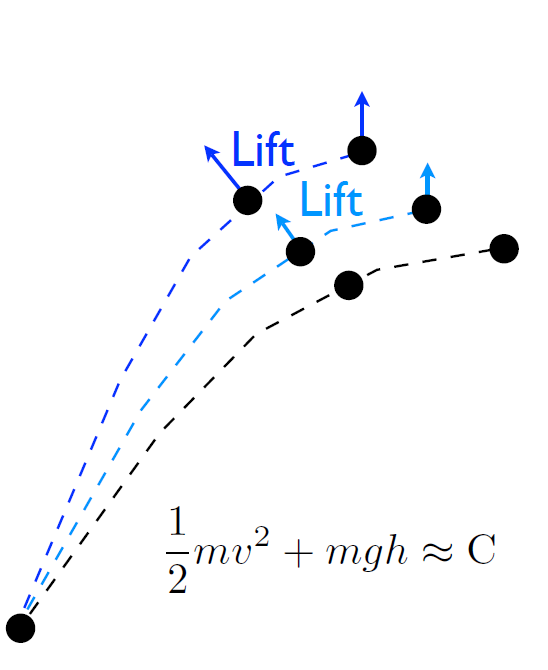 | 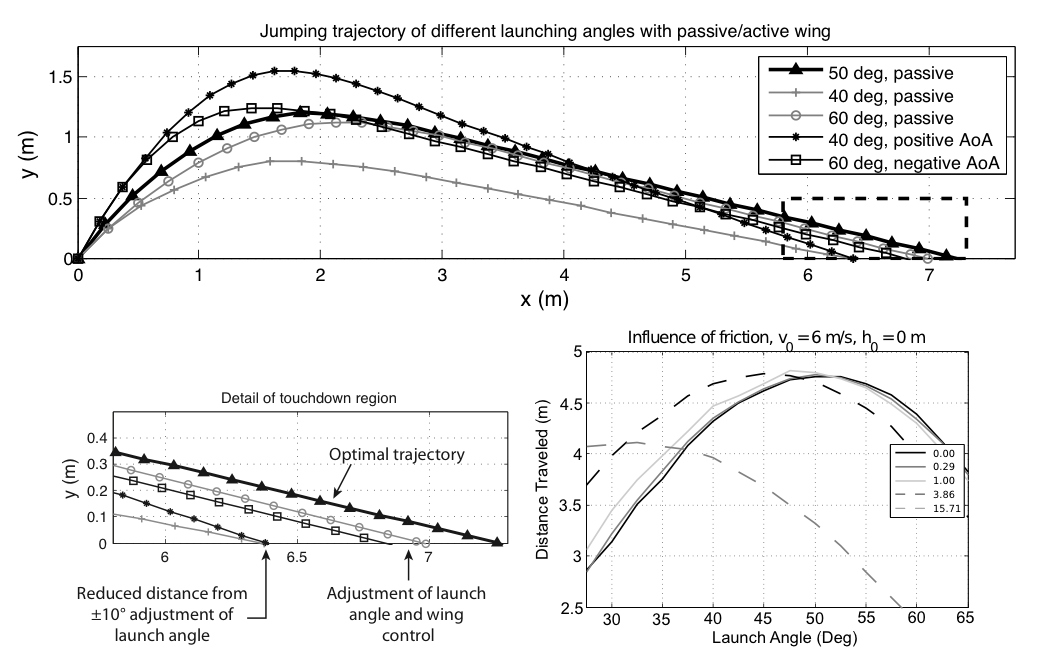 |
Sometimes, however, a little lift on the way up can be helpful. If the angle of attack is kept very close to zero, drag is much smaller than lift and very little energy is lost in adjusting the ballistic trajectory - sometimes in very helpful ways.
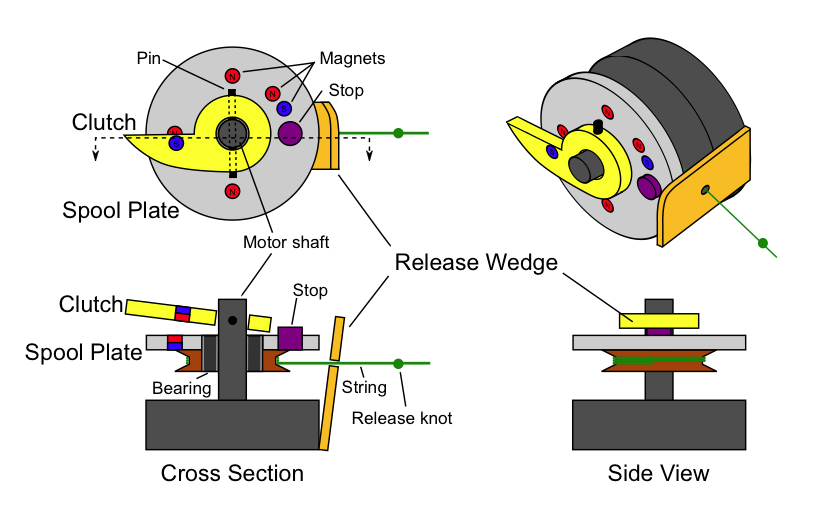 |  |
To make our jumpglider run over and over again, we developed a passive mechanical system that automatically wound up and released the large carbon bow spring we used for jumping.
For more details see Design principles for efficient, repeated jumpgliding (JBB 2014)
Videos
In the news
Gizmag has one of the best articles on our first Jumpgliding prototype. These articles at Inhabitat and The Tech Journal cover the same basic territory, while this article at Discovery.com refers to our later publication.
Publications
(from JumpGlidingPublications)