On this page... (hide)
- 1. Vision for the Human Safe Robot Project
- 2. Publications
- 3. Videos
- 4. What's New?
- 5. Links
1. Vision for the Human Safe Robot Project
New classes of robots are being designed to interact with humans: helper robots, cobots, and exoskeletons are fast becoming commercialized. The old methods of keeping humans and robots completely separated to ensure safety are antiquated and prevents potential productivity improvements through human-robot teams. In order to achieve the goal pervasive robots, the issue of safety must be addressed. This body of work seeks to investigate and implement design methodologies for the development of safe robotic platforms.
Impact Absorbing Capacitive Skin Sensors for Collision Detection and Impact Mitigation
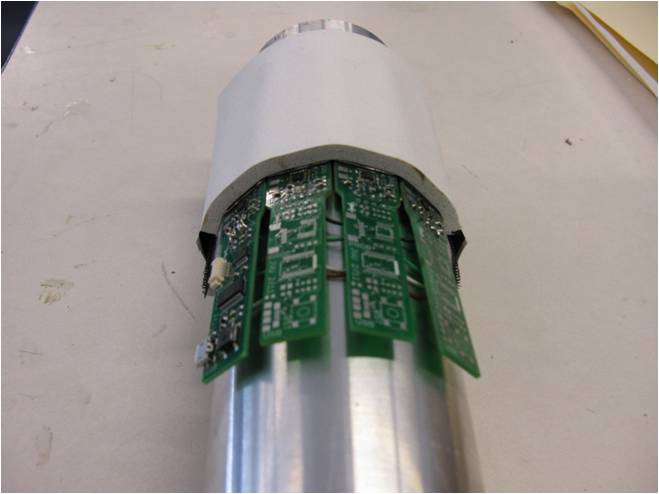
Without sensors, robots are unable to detect and respond to external stimuli. BDML has developed robust, low cost capacitive skin sensors that combine sensing as well as peak force reduction capabilities. Current work includes interfacing the prototype skin with robotic platforms, such as Honda's Asimo and the Stanford Safety Robot manipulator, and developing post collision behaviors to minimize injury.
Robot Collision Testing
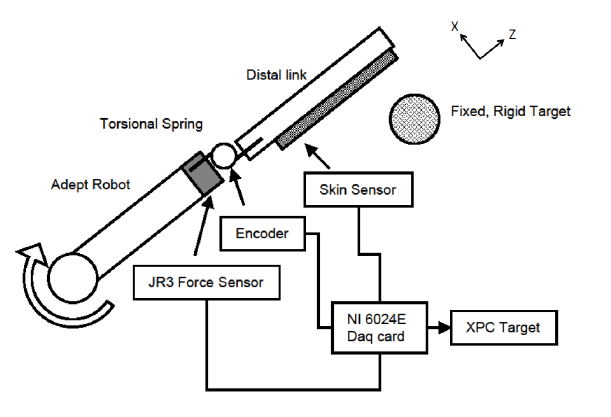
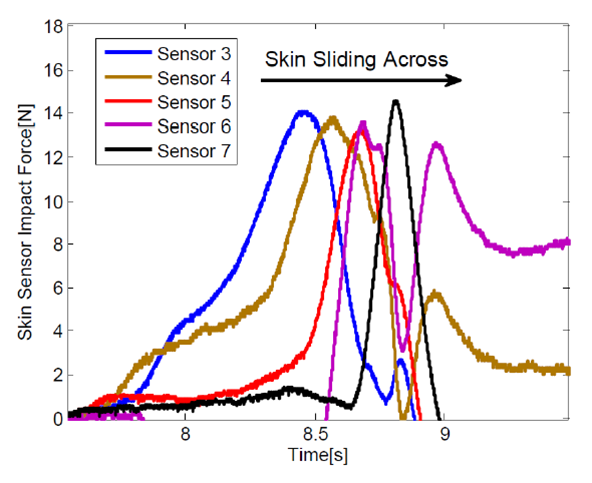
Collision testing allows efficacy verification of robot skin as a sensor array as well as impact mitigation system. Testing is currently done using an AdeptOne robot platform; future plans include impact testing using different robot platforms as they become available.
Robot Design Tools and Injury Modelling
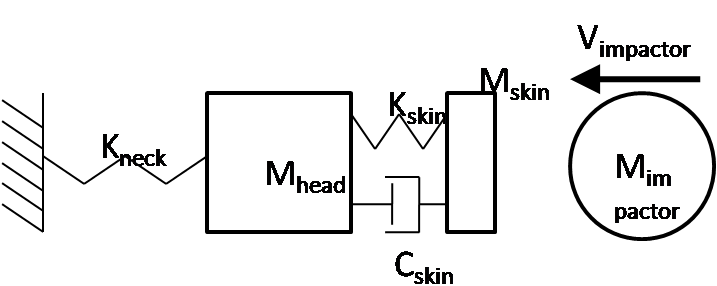
Numerous design tradeoffs are necessary before anything is built. Research at the BDML seeks to provide designers with tools that help translate robot design parameters into their effect on injury. This work combines tissue modelling with robot hardware design.
2. Publications
(from HumanSafePublications)
Samson Phan, "Sensing and modeling collisions for safer human-robot interaction," PhD thesis, Stanford University, 2013
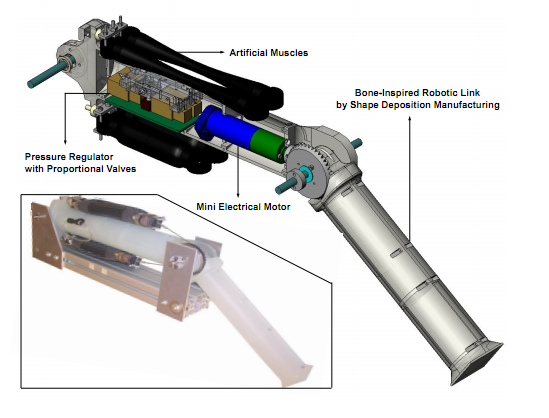
Dongjun Shin, Samson Phan, Zhan Fan Quek, Mark Cutkosky, Oussama Khatib, "Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots," IEEE/RSJ IROS 2011, San Francisco, Sept. 2011.
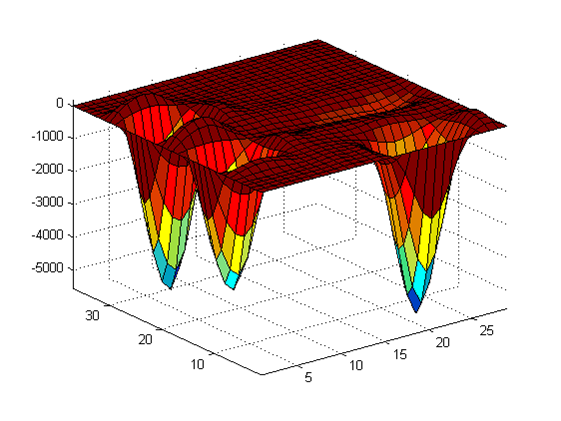
Samson Phan, Zhan Fan Quek, Preyas Shah, Dongjun Shin, Zubair Ahmed, Oussama Khatib, Mark Cutkosky, "Capacitive Skin Sensors for Robot Impact Monitoring," IEEE/RSJ IROS 2011, San Francisco, Sept. 2011.
3. Videos
(from HumanSafeVideos)
4. What's New?
- March 16, 2012: ARM-S Teams getting sensor prototypes: StanfordTactileSensor.
- February 28, 2012: Consultation with Statistics Dept.
- February 24, 2012: Begin statistical analysis of data.
- February 23, 2012: Full factorial experiment completed.
- January 3, 2012: New year! Beginning Full factorial experiment.
- October 5, 2011: Excellent reception of paper at IROS. Stay tuned for next paper.
- July 16, 2011: Final IROS conference paper submitted! Attend the conference in San Francisco to see the latest in capacitive skin sensors for robots.
- July 1, 2011: New 48 node capacitive sensor array completed. Its flexible design will allow the sensor to be placed on numerous robot platforms. Work will focus on implementing data collection in QNX RTOS environment.
5. Links
(from HumanSafeLinks)