
Introduction
An effective early application of wearable haptics is the training of repetitive motions such as walking, to alleviate discomfort or adverse joint loading associated with the progression of diseases like osteoarthritis. This application of wearable haptic feedback involves a collaboration among researchers at BDML and the Stanford Human Performance Lab.
Motivation
With the cost of health care rising and an aging baby boomer generation requiring increasing medical assistance, it is imperative that new technologies be developed and implemented to improve the quality of health care while simultaneously reducing costs. Arthritis is a major health concern that could benefit from such new technologies. The impact of preventing or more efficiently treating arthritis would be immense as seen in the following:
- Arthritis is the leading cause of disability among adults in the U.S.
- 46 million U.S. adults (20%) have doctor-diagnosed arthritis.
- $128 billion in total costs or 1.2% of the U.S. gross domestic product was spent on arthritis in 2003.
- Reducing the incidence of arthritis by even 1% would cut the total cost by $1.3 billion per year, a savings of more than $3.5 million per day
Medial Compartment Knee Osteoarthritis
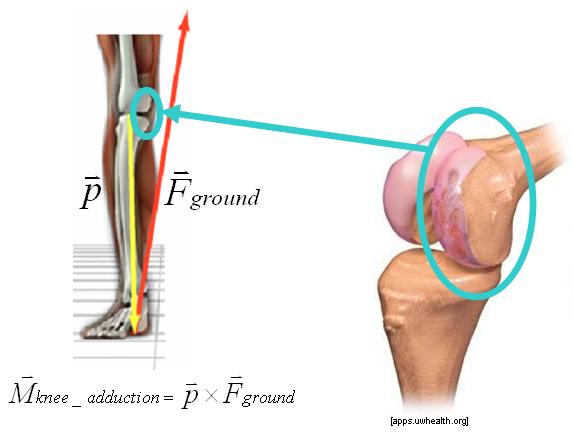
Knee osteoarthritis (OA) is the most prevalent form of arthritis afflicting 28% of U.S. adults over age 45 and 37% of U.S. adults over age 65. Knee OA causes pain leading to loss of mobility and often requires painful and expensive surgeries. OA affects the medial compartment (inside) of the knee approximately ten times more frequently than the lateral compartment (outside), and the relative medial-to-lateral loading has been linked to the severity and rate of progression of knee OA. In light of this trend, we created a gait retraining system focused on changing gait parameters to lower the knee adduction moment as a treatment method for osteoarthritis.
Methods
Overall System
We developed a real-time motion retraining system aimed at changing gait patterns to reduce knee joint loads. The Overall System diagram depicts the control structure. The human performs some kind of dynamic movement. Sensors are then used to capture motion and/or force data. Motion values are collected with a Vicon marker-based motion capture system, and forces are measured with embedded force plates in a Bertec treadmill. Sensed data are then fed into a musculoskeletal model which converts these measurements into meaningful biomechanical parameters such as joint velocities or joint reaction forces. The desired movement block determines desired biomechanical parameters that are compared to the actual. Haptic feedback is used to alert the user of necessary changes. It is possible for the musculoskeletal model and desired movement blocks to be adaptive depending on the application.
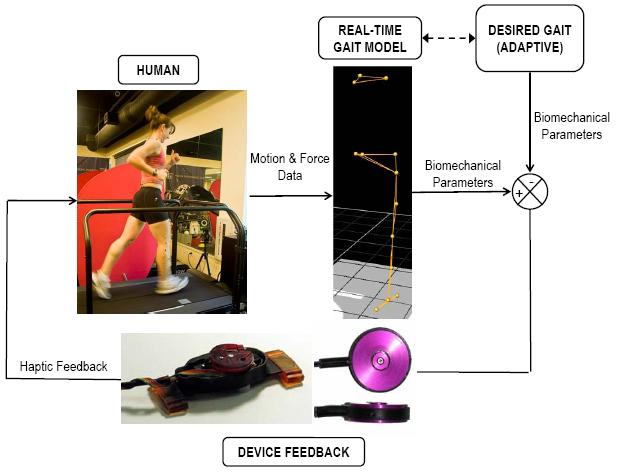
**Overall System**
Haptic Feedback and Trained Gait Parameters
**Gait Parameters to Train**
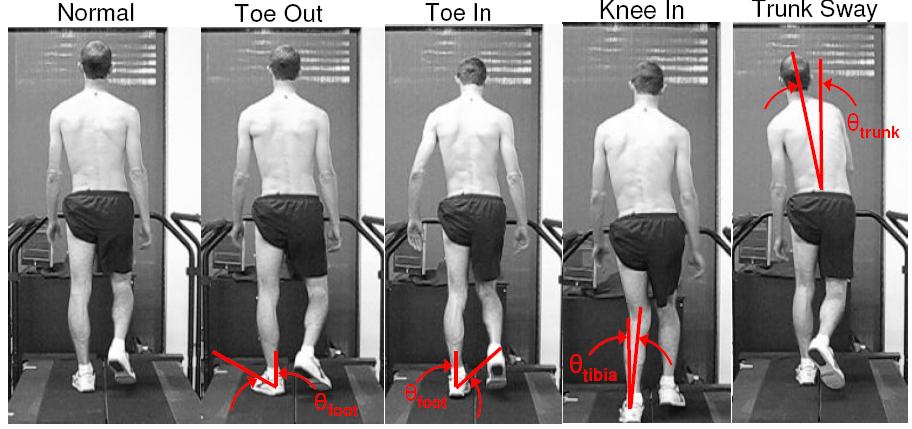
We targeted gait parameters for training and control, which previous studies had identified as having an influence on the KAM: trunk sway angle (TSA), tibia angle (TA) and foot progression angle (FPA). Trunk sway angle was defined as the maximum angle that a vector from the lower back to the upper back deviated from vertical in the frontal plane during a complete gait cycle. Tibia angle was the maximum angle that a vector from the outside of the ankle to the outside of the knee deviated from vertical in the frontal plane during the stance phase of each gait cycle. Positive tibia angle was toward the body. Foot progression angle was defined as the maximum angle that a vector from the heel to the toe deviated from a line pointing directly away from the front of the subject in the horizontal plane during the stance phase. Positive foot progression angle occurred when the toe pointed in toward the subject. Haptic feedback devices were placed at or near the associated gait parameters, and a metronome was used as an audio indicator to train subjects on stride length.
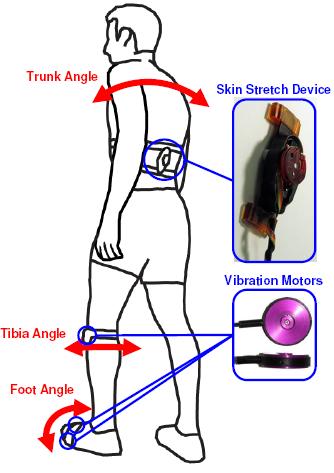
**Haptic Feedback Devices and Locations**
Rotational skin stretch was used to indicate the necessity to sway the upper torso by a certain amplitude to change the trunk sway
angle. Skin stretch was applied continuously as a sinusoid, chosen for its similarity to the movement pattern of the torso during ambulation. The frequency of the sine wave was set to match the subject�s gait frequency. Two amplitudes of sine waves were used
for feedback. The larger amplitude was used when a large increase in trunk sway angle was desired and the small amplitude was used
to indicate a small desired increase. If the subject walked with too much trunk sway, the skin stretch device rotated quickly three times at 5Hz. If the user�s trunk sway was in an acceptable range, the skin stretch device did not rotate but remained in the neutral position. We used discrete sine wave amplitudes instead of continuously varying amplitudes to give users a clear indication of improving or declining performance. Vibration motors were used as feedback indicators for tibia angle and foot progression angle. Unlike trunk sway, which was perpetually changing, these gait parameters were nearly constant during the stance phase of gait. Thus, vibration was used as an indicator to simulate a type of restoring force to move the gait parameter back to a specific static location during stance. One vibration motor was placed on the lateral side of the knee to indicate desired mediolateral knee position and the associated tibia angle. During each step a 500 ms pulse vibrated to alert the user that the knee position should be more medial. A large amplitude pulse indicated a large change and a small amplitude pulse indicated a small change. If the knee position was too medial, the motor gave three short 100 ms pulses, and if the knee position was in an acceptable range the motor did not vibrate. Two vibration motors were attached to the foot and worked in a similar manner to control the foot progression angle. Lateral motor vibrations indicated a need to point the toe more inward during static stance alignment and medial motor vibrations to point the toe more outward. We acknowledge that there may be other configurations of haptic devices and signal implementations that may be equally or more effective than that which is presented here. Our choices were based on pilot studies and intuition and did work particularly well for this application.
Localized Linear Modeling for Data-Driven Gaits
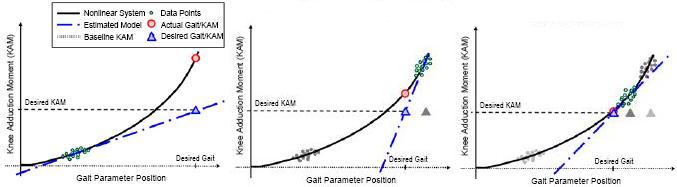
**Localized Linear Modeling**
The relationship between gait parameters and the KAM is complex
due to the kinematics and dynamics of the human body, and
is likely to be highly nonlinear and subject specific. As it would
be impractical to collect data over the entire search space to create
an accurate system model, we present an approach for reducing
the KAM, which uses a limited amount of data in n-dimensional
space of the chosen gait parameters. This approach utilizes localized
linear models recomputed over successive iterations similar to
Newton�s method. We estimate the desired gait using a heuristic
approach then iterate by modeling the system about a point and
predicting subsequent gaits in an attempt to achieve a particular
KAM reduction.
Publications
(from HapticsPublications)
Publications before 2011 are listed on:
Journals
Han, A.K., Ji, S., Wang, D. and Cutkosky, M.R., "Haptic Surface Display based on Miniature Dielectric Fluid Transducers," IEEE Robotics and Automation Letters (2020)
Frishman, S., Kight, A., Pirozzi, I., Coffey, M.C., Daniel, B.L. and Cutkosky, M.R., "Enabling In-Bore MRI Guided Biopsies with Force Feedback," IEEE Transactions on Haptics (2020) 10.1109/TOH.2020.2967375
Han, A.K.*, Bae, J.H.*, Gregoriou, K.C., Ploch, C.J., Goldman, R.E., Glover, G.H., Daniel, B.L. and Cutkosky, M.R., "MR-Compatible Haptic Display of Membrane Puncture in Robot-Assisted Needle Procedures," IEEE Transactions on Haptics (2018).
P. Shull, X. Zhu and Cutkosky, M.R., "RE: TH-2016-08-0093.R2, "Continuous Movement Tracking Performance for Predictable and Unpredictable Tasks with Vibrotactile Feedback," IEEE Transactions on Haptics, published online 29 March 2017. DOI: 10.1109/TOH.2017.2689023
Y. Huang, W. Jirattigalachote, M.R. Cutkosky, X. Zhu, P. Shull, "Novel Foot Progression Angle Algorithm Estimation via Foot-Worn, Magneto-Inertial Sensing," IEEE Transactions on Biomedical Engineering, vol.PP, no.99, pp.1-1 doi: 10.1109/TBME.2016.2523512
P.B. Shull, W. Jirattigalachote, M.A. Hunt, M.R. Cutkosky, S.L. Delp, �Quantified self and human movement: A review on the clinical impact of wearable sensing and feedback for gait analysis and intervention,� Gait and Posture (Elsevier), Vol 40, No. 1, 2014, pp 11-19. doi:10.1016/j.gaitpost.2014.03.189
P. Shull, A. Silder, R. Shultz, J. Dragoo, T. Besier, S. Delp and M.R. Cutkosky, �Six-week gait retraining program reduces knee adduction moment, reduces pain, and improves function for individuals with medial compartment knee osteoarthritis,� Journal of Orthopedic Research, Vol. 31, No. 7, July 2013. doi: 10.1002/jor.22340
Pete B. Shull, Rebecca Shultz, Amy Silder, Jason Dragoo, Thor Besier, Mark R. Cutkosky, and Scott Delp, "Toe-in gait reduces the first peak knee adduction moment in patients with medial compartment knee osteoarthritis.", Journal of Biomechanics, Vol. 46, No. 1, pp. 122-128, 2012.
Pete B. Shull, Kristen L. Lurie, Mark R. Cutkosky, and Thor Besier, "Training Multi-parameter Gaits to Reduce the Knee Adduction Moment with Data-driven Models and Haptic Feedback.", Journal of Biomechanics, 44(8):1605-1609, 2011.
Conference Proceedings
Choi, H., Brouwer, D., Lin, M.A., Yoshida, K.T., Rognon, C., Stephens-Fripp, B., Okamura, A.M., Cutkosky, M.R., "Deep Learning Classification of Touch Gestures Using Distributed Normal and Shear Force", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022. Best Poster Presentation Award at the Workshop on Large-Scale Robotic Skin: Perception, Interaction, and Control
Ploch, C.J., Bae, J.H., Ploch, C.C., Ju, W., Cutkosky, M.R., "Comparing Haptic and Audio Navigation Cues on the Road for Distracted Drivers with a Skin Stretch Steering Wheel," In Proceedings of the 2017 IEEE World Haptics Conference (WHC 2017). Best Poster Paper Finalist, Best Poster Presentation Finalist.(preprint).
Bae, J.H.*, Han, A.K.*, Ploch, C.J., Daniel, B.L., Cutkosky, M.R., "Haptic feedback of membrane puncture with an MR-compatible instrumented needle and electroactive polymer display," In Proceedings of the 2017 IEEE World Haptics Conference (WHC 2017). Best Paper and Best Student Presentation Finalist
Ploch, C.J., Bae, J.H., Ju, W., Cutkosky, M.R., "Haptic Skin Stretch on a Steering Wheel for Displaying Preview Information in Autonomous Cars,", In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, Oct 9-14, 2016. Highlight Presentation.
Han, A.K., Wang, S., Bae, J.H., Christensen, D.L., and Cutkosky, M.R., "Toward MR-Compatible Needle Tip Force Display using EAP Actuation," Haptics Symposium 2016.
Bae, J.H., Ploch, C., Yang, M. A., Daniel, B.L., and Cutkosky, M.R., "Display of Needle Tip Contact Forces for Steering Guidance," Haptics Symposium 2016 Haptics Symposium (HAPTICS), 2016 IEEE, 332-337
Elayaperumal, S., Bae, J.H., Daniel, B.L. and Cutkosky, M.R.,"Detection of Membrane Puncture with Haptic Feedback using a Tip-Force Sensing Needle," IROS,2014,vol.,no.,pp.3975 - 3981,14-18 Sept. 2014 doi:10.1109/IROS.2014.6943121
Elayaperumal, S.; Bae, J.H.; Christensen, D.; Cutkosky, M.R.; Daniel, B.L.; Black, R.J.; Costa, J.M.; Faridian, F.; Moslehi, B., "Mr-compatible biopsy needle with enhanced tip force sensing," World Haptics Conference (WHC), 2013 , vol., no., pp.109,114, 14-17 April 2013 doi: 10.1109/WHC.2013.6548393
Wisit Jirattigalachote, Pete B. Shull, and Mark R. Cutkosky, "Virtual Pebble: a Haptic State Display for Pedestrians," Δ proceedings: IEEE RO-MAN 2011, Atlanta, GA, Aug. 2011.
Abstracts
Pete B. Shull, Rebecca R. Shultz, Amy Silder, Thor Besier, Mark R. Cutkosky, and Scott Delp, Toe-in Gait Reduces the First Peak in the Knee Adduction Moment during Walking in Knee Osteoarthritis Patients. American Society of Biomechanics, Gainsville, GA, 2012.
Pete B. Shull, Amy Silder, Thor Besier, Scott Delp, and Mark R. Cutkosky, Six-week Gait Retraining Program for Knee Osteoarthritis Patients: Learning Retention and Symptom Changes. American Society of Biomechanics, Gainsville, GA, 2012.
Other Publications and Reports
Interview with G.J. Vermeij (1995) reports on a meeting between Michael Costa, Mark Cutkosky and Prof. G.J. Vermeij, a blind field paleontologist at U.C. Davis. The notes cover tactile exploration and perception at different scales of length and time, from textures to 3D geometry. They provide food for thought for the designers of tactile sensors and displays.