BDML at ICRA 2024 debrief coming soon!
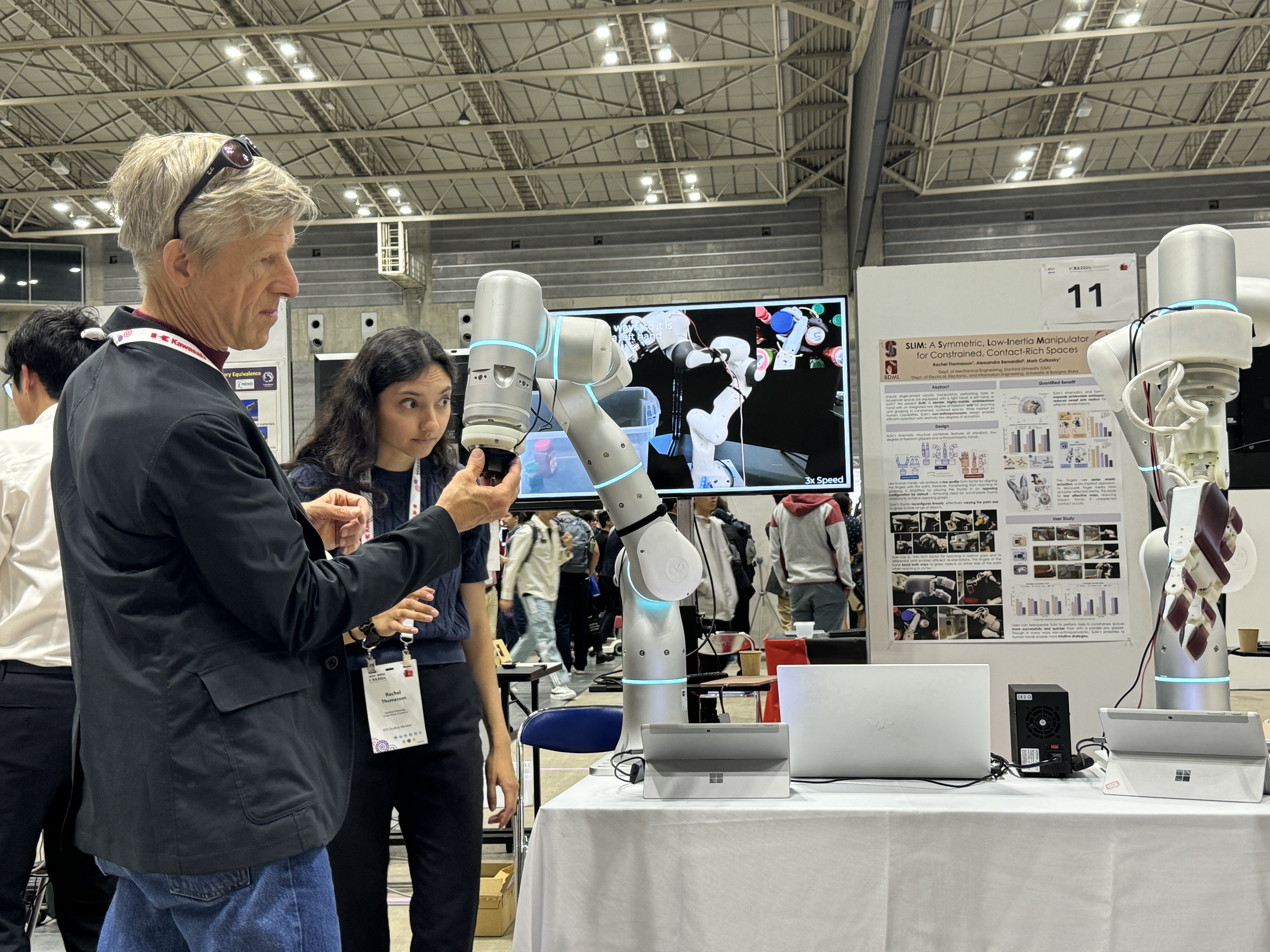
Rachel demonstrates SSLIM at ICRA
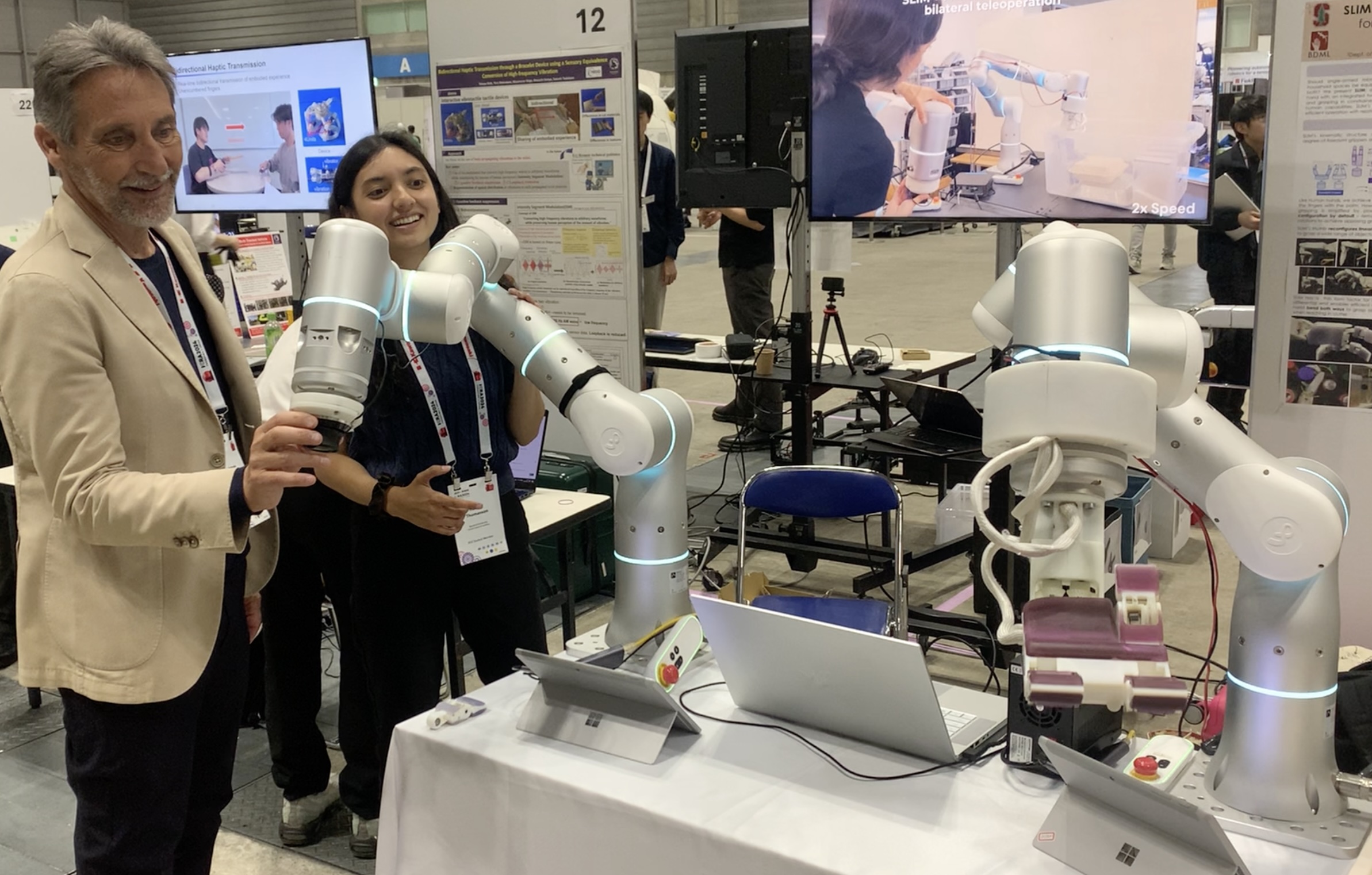
Antonio Bicchi controls SLIM with the teleoperated setup at ICRA 2024. Special thanks to Flexiv for lending us their arms! (click for video)
Page last modified on July 23, 2024, at 03:45 PM