Category: Adhesion
Tendon-inspired Ankle Design
As climbing robots grow larger, mass increases as L^3 while contact area increases, at best, as L^2. Thus it is increasingly important to develop mechanisms that facilitate alignment and distribute the load over the available contact area without local stress concentrations.
The tendon-inspired ankle design is a mechanism that allows large (> 100cm^2) patches of synthetic fibrillar dry adhesives applied inexactly by a climbing robot to perform at levels previously obtained only for small samples in controlled bench-top tests. The mechanism is inspired by structures found in the toes of the gecko including a sinus and branched tendon with multiple attachment points (Russell1981,Russell2002). The design uses a bladder and multiple tendon structure to achieve uniform loading and prevent premature peeling failures despite significant misalignment with a flat wall surface. The design is demonstrated on Stickybot III, an approximately 1 kg climbing robot, and can be scaled to larger areas and loads by tiling the basic structure. With the advancements in the Stanford directional adhesives and the tendon-inspired design presented on this page, the RiSE robotic platform is now able to climb smooth surfaces such as glass. During the RiSE project, climbing was limited to surfaces where claws and small hooks were able to make strong footholds. In the video below, the RiSE platform weighing 2.6kg is shown using a diagonal stride to climb a glass surface; a feat originally well beyond the scope of the RiSE climbing project.
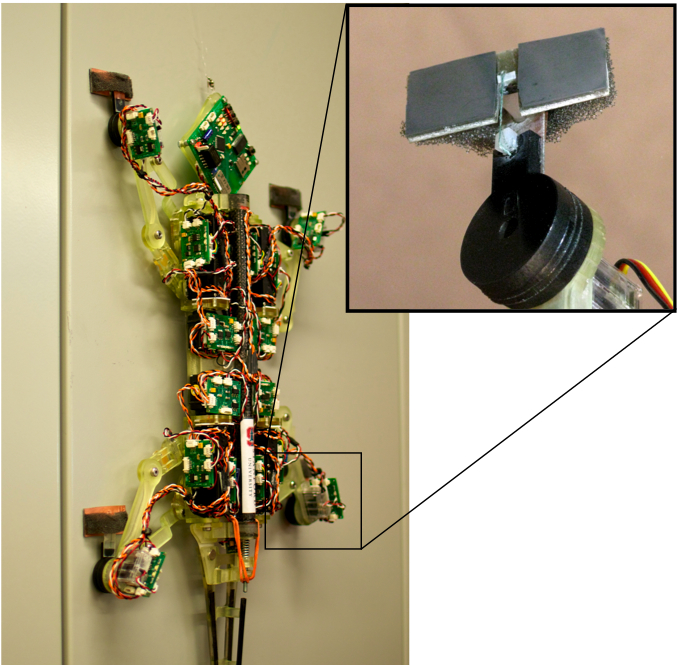 | 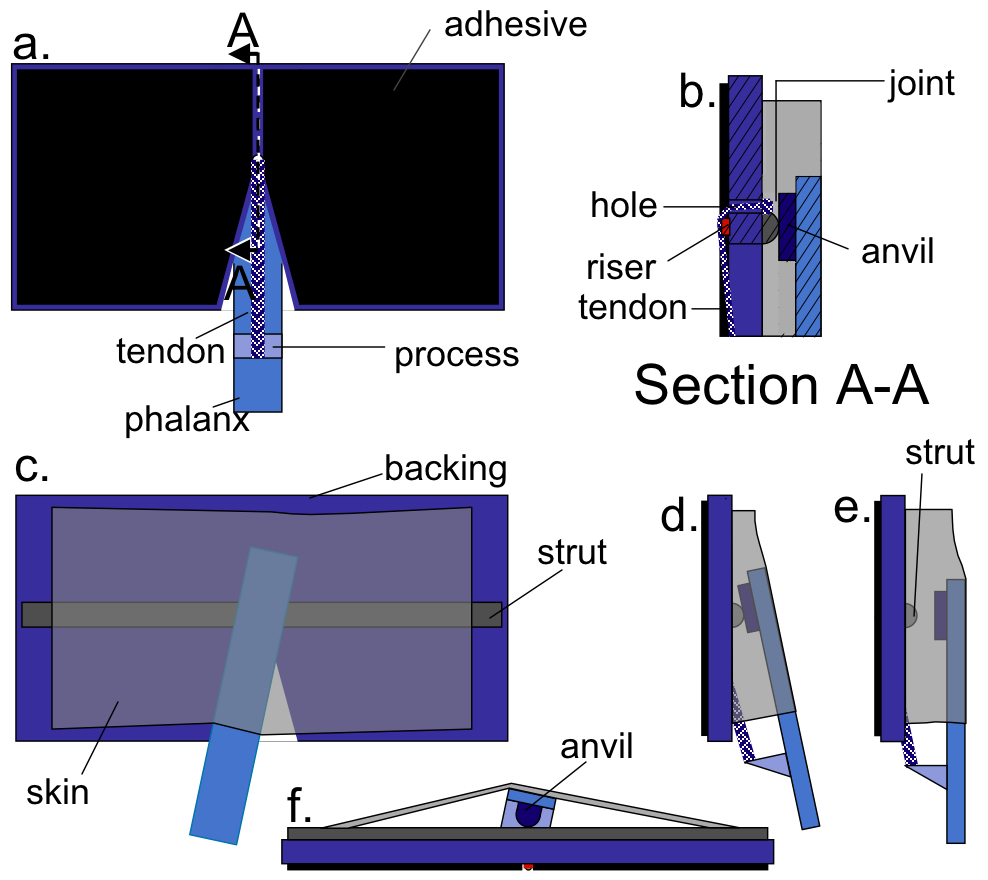 |
| Stickybot III with tendon-inspired mechanism | Schematic of the Ankle Mechanism showing crossed-cylinder joint and tendon |
http://www.youtube.com/watch?v=6gmwSGAnQDw
The plot and detail below show maximum tangential and adhesive forces under varying conditions. Points in black show maximum pull-off data for small samples in carefully aligned bench-top tests. Points in green are the best results previously obtained on a compliant foot with StickybotIII. As the plot shows, these exceed the typical forces (red lines) experienced in climbing with some safety margin. However, the maximum forces obtained with the new tendon design (blue dots) afford a much greater safety factor and essentially match the bench-top tests.
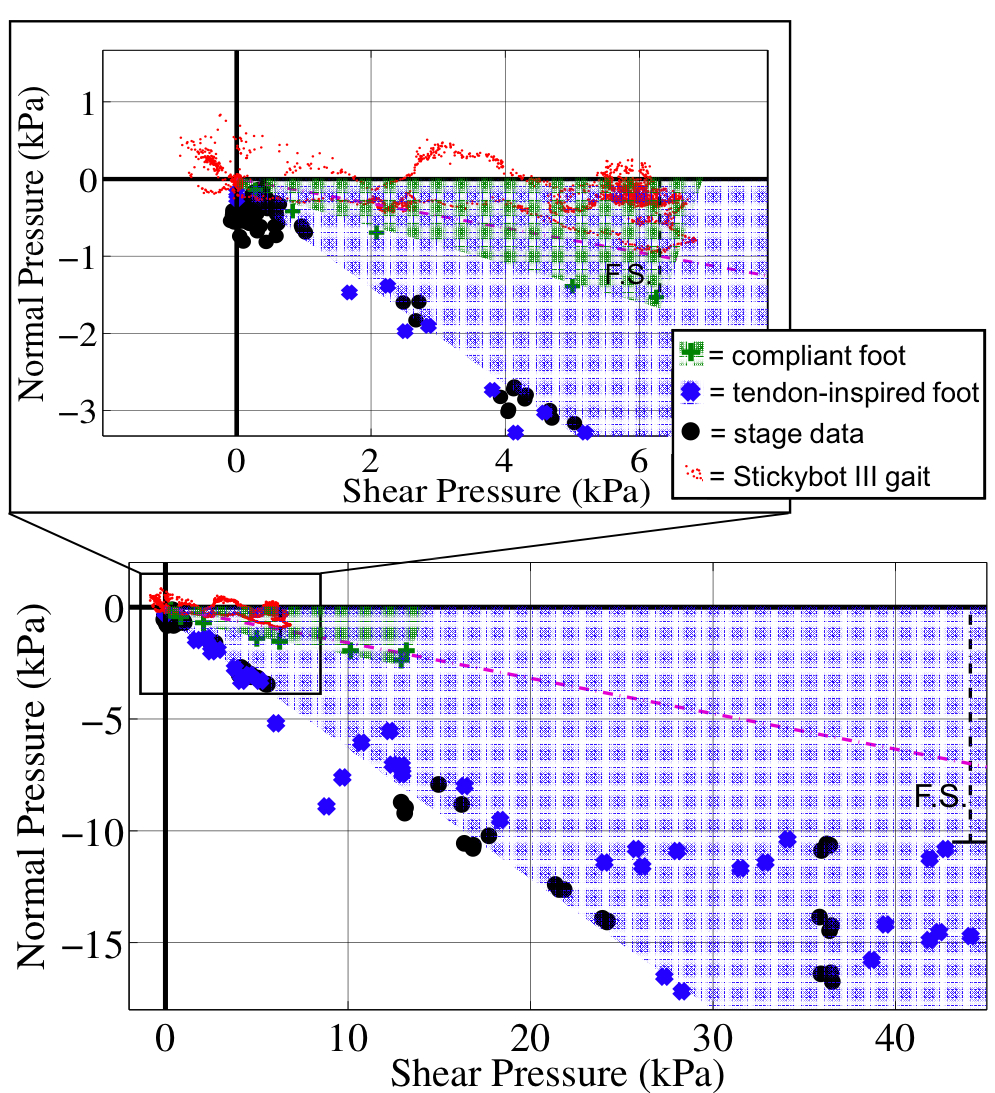 |
| Plot of adhesion pressures for Tendon-inspired mechanism, as well as the adhesive on a well-aligned, rigid stage. |