categories: Adhesion, MobileManip
Ford project and Robotiq project and Honda project here... To be fleshed out by Hojung and Amy, and Mark.
Think what we want to say and add a couple of images on this page to document what we are doing and discovering.
Background and motivation
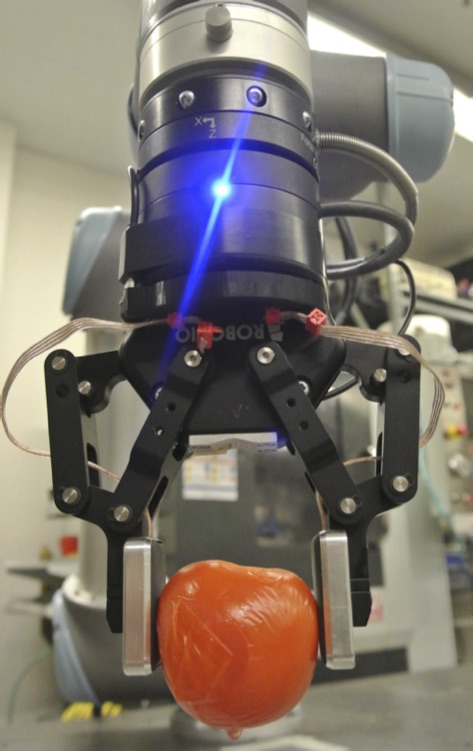
Grasping an overripe tomato with
gecko-inspired adhesives (Roberge 2019)
The first applications of our gecko-inspired directional adhesives were for cases where the normal pressure at the contact is zero, or even negative. Examples include climbing robots, and perching MAVs, and lifting flat or curved panels. However, there are many manufacturing and home robotics applications where the adhesive can provide advantages even when there is a positive normal pressure at the contact, achieved using a grasp force. In these cases the gecko-inspired adhesive essentially provides "super friction" -- much higher than one can achieve using soft rubber. The benefit is largest when the grasp force should be very low and when the object to be grasped is smooth. However, the benefit still exists for many other objects; in the worst case the performance is no worse than one would achieve with soft rubber.
ManipulationWithAstrictiveContact - This page will summarize farmHand and related works
soft gripper: AdhesionPublications#RAL2018_SoftGripper