FBG Whisker tackles two practical bottlenecks in underwater hydrodynamic perception: reducing self-induced sensor noise during robot motion and turning delayed wake cues into robot action.
The key idea? Pair a seal-inspired low-VIV whisker morphology with two-axis optical FBG sensing, then test whether a single whisker can support delayed branch selection on an underwater robot.
Why hydrodynamic whiskers?
What does a seal do that an underwater robot might want to do?
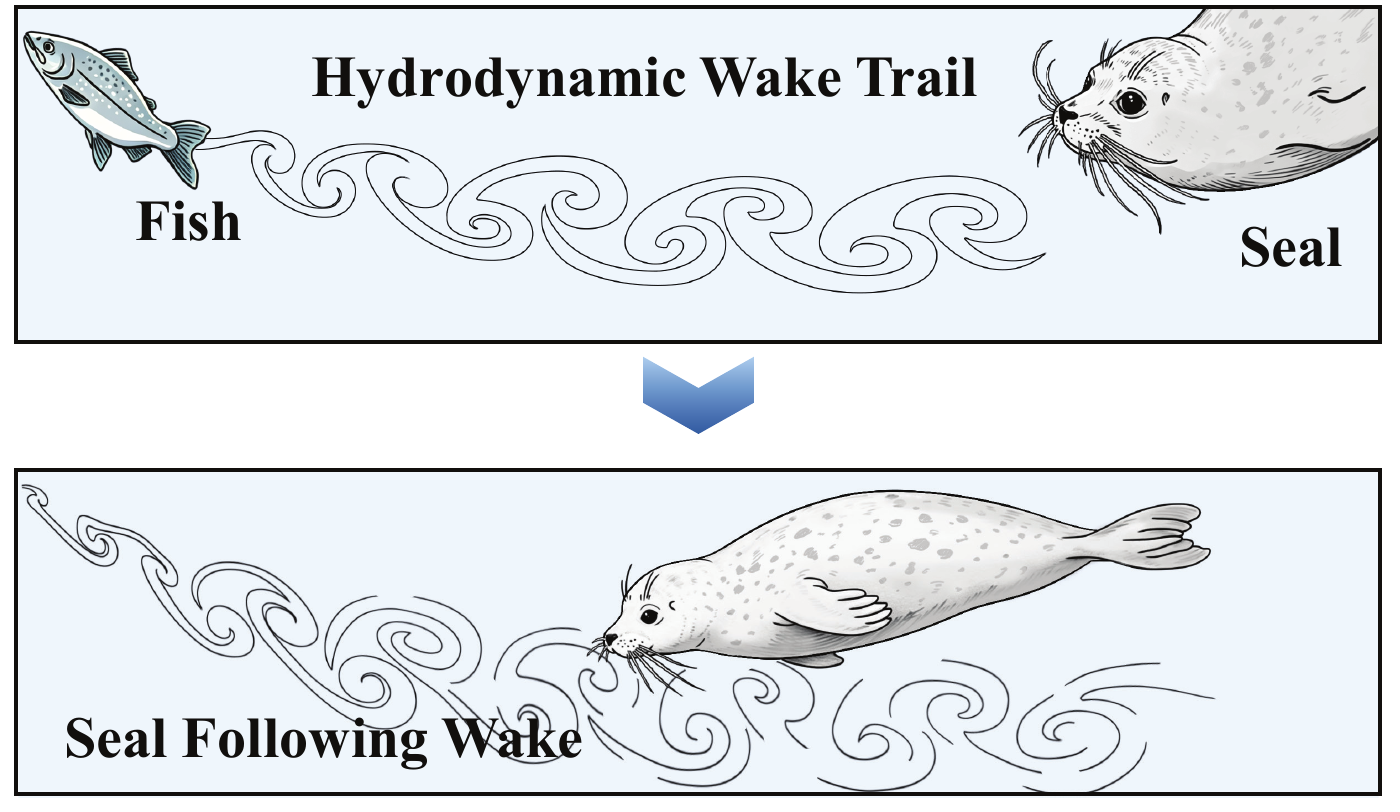
Harbor seals can use whiskers to sense hydrodynamic trails left by moving sources, even when vision is limited. This motivates a passive sensing modality for underwater robots: instead of imaging the source directly, the robot can read the flow disturbance that remains after the source has passed.
A recoverable optical whisker for underwater robots
How is the whisker sensor built?
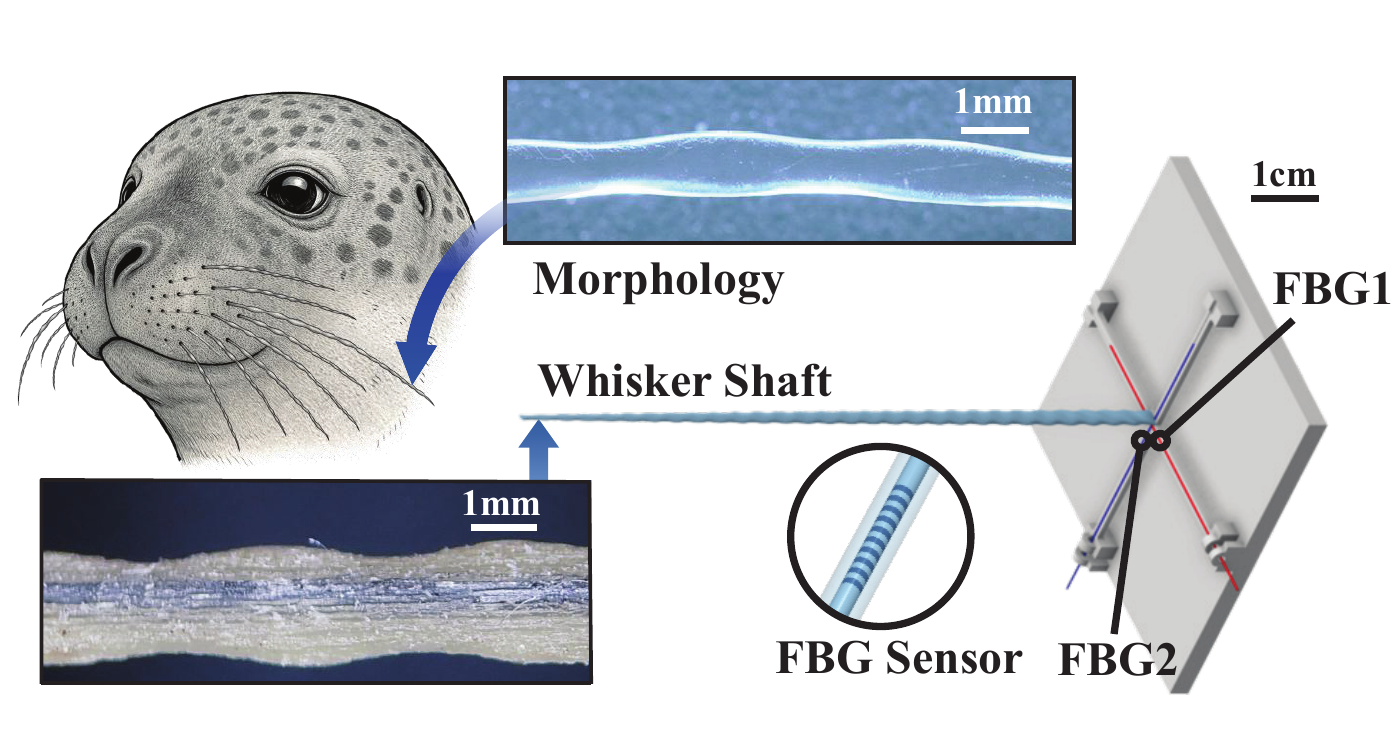
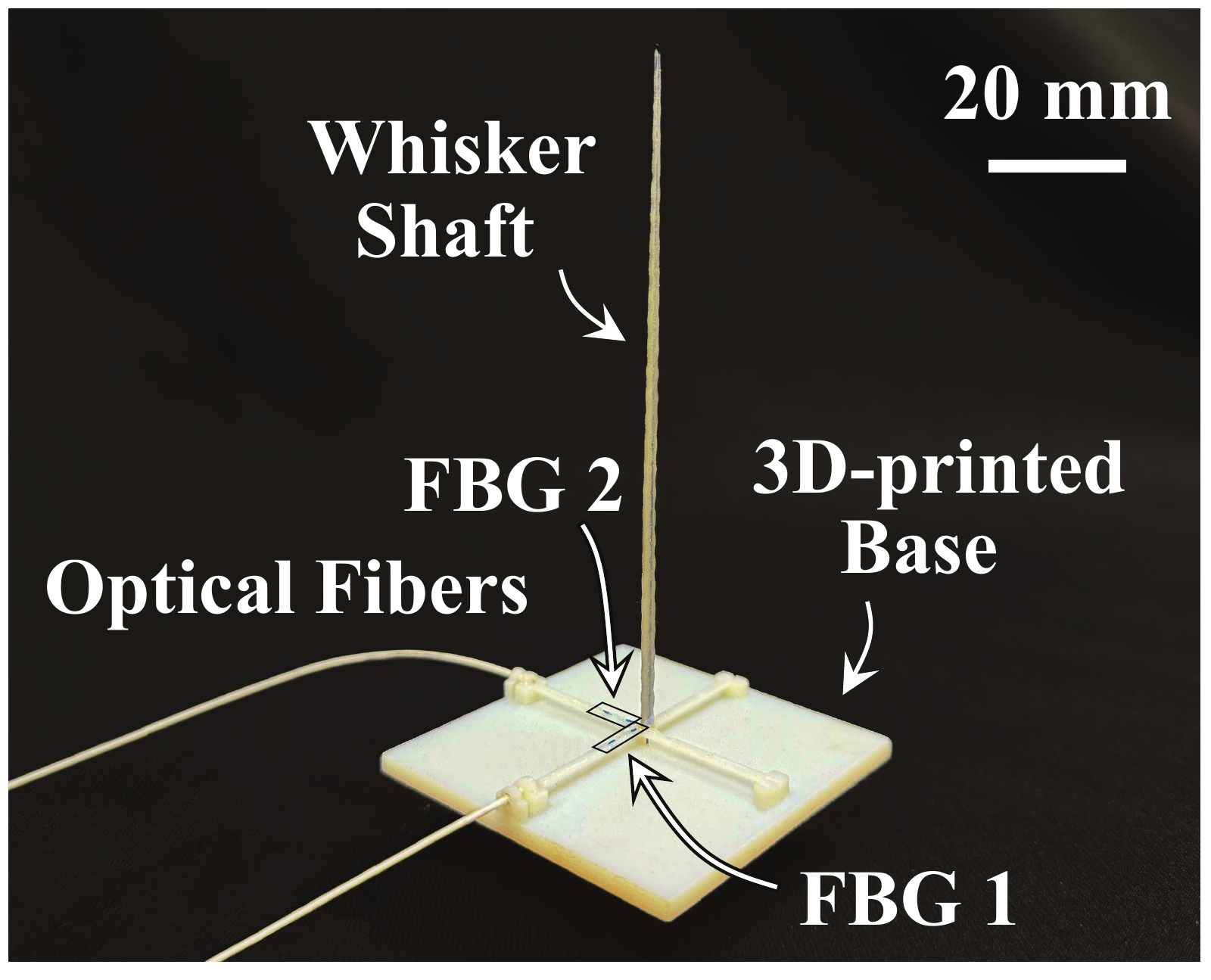
The sensor combines a wavy tapered whisker shaft with a compact FBG base. A superelastic NiTi core and urethane shell give the shaft flexibility and recovery after large underwater deflections. Two orthogonal FBG channels measure bending at the base.
Underwater recovery after large deflection.
Suppressing self-induced vibration
Why does the shape matter?
A robot-mounted whisker must not confuse its own vortex-induced vibration with external wake cues. In towing tests at 0.6 m/s, the wavy tapered geometry showed much smaller cross-flow oscillation than a cylindrical baseline.
Wavy geometries reduce self-induced oscillation relative to a cylindrical whisker during towing.
The wavy tapered whisker also shows a monotonic relative-flow response from 0.1 to 0.6 m/s.
Testing a Moving-source Trail
Can the whisker read a wake after the source has passed?
We first use a fixed pitching foil to verify that the whisker responds to foil-generated unsteady flow. But the robot task is different: the source moves away, and the ROV senses the remaining trail later. We therefore use a co-translating foil–whisker experiment as the pool analogue for the delayed wake cue used in branch selection.
The foil pitches while the foil and whisker translate together, producing a finite-Strouhal moving-source trail analogue.
In this condition, St = 0.35. The response map visualizes reconstructed FBG signal magnitude and direction, not direct velocity or vorticity.
Can one whisker drive a robot decision?
From a single 2-second FBG window: straight, or turn?
A foil first generates a hydrodynamic trail. After the source has moved on, the ROV enters a decision region. A logistic-regression classifier uses the most recent 2 seconds of two-channel FBG history to choose whether the robot should continue straight or turn.
A single front-mounted whisker supports delayed straight-vs-turn branch selection from FBG signals alone.
- Online trials17 / 20 correct
- Straight9 / 10
- Turn8 / 10
- Held-out AUROC0.863
- Held-out AP0.776
- Decision window2 s
- InputFBG signals only
Visual tracking was used for localization, control, and evaluation, but not as classifier input. This is delayed binary branch selection in a controlled pool task, not continuous wake tracking.
Does the signal survive outside the pool?
A qualitative check in coastal water.
At Hopkins Marine Station, the whisker-equipped ROV recorded two-channel events associated with diver-fin wake disturbances in coastal water. This checks signal detectability outside the controlled pool environment.
Field deployment in coastal water.
This is a qualitative field demonstration, not calibrated wake-range estimation or closed-loop trail tracking.
Questions & Answers
Why use whiskers instead of cameras or sonar?
Whiskers sense a different cue: the local hydrodynamic trail left by a moving source. Cameras require visibility and line of sight, while acoustic sensing can be power-intensive, geometry-ambiguous, or undesirable in some environments. An FBG whisker is therefore a complementary passive sensor for reading nearby flow and wake cues, not a replacement for cameras or sonar.
Why is the wavy morphology important?
A robot-mounted whisker must avoid generating large self-induced oscillations during relative flow. The wavy tapered geometry reduces vortex-induced vibration relative to a cylindrical baseline.
Why distinguish a fixed pitching foil from a moving-source trail?
A fixed pitching foil is a useful unsteady-flow benchmark, but the robot task depends on delayed sensing of a trail left by a moving source. The moving-source analogue is the more relevant pool condition.
What exactly does the robot experiment demonstrate?
It demonstrates delayed binary branch selection from whisker signals alone in a controlled pool task. The robot chooses straight or turn using a 2-second two-channel FBG signal window.
Was visual tracking used by the classifier?
No. Visual tracking was used for localization, control, and evaluation. The classifier used only FBG signal features.
What does this not demonstrate yet?
It does not yet demonstrate continuous trail centering, biological-level seal wake tracking, robust open-ocean autonomy, or closed-loop field tracking.
What is the field deployment meant to show?
It is a qualitative signal-detectability check in coastal water, not calibrated wake-range estimation or closed-loop trail tracking.