new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>StickyBot>SbTwo (30 Aug 2006, MarkCutkosky)
Rise Web>StickyBot>SbTwo (30 Aug 2006, MarkCutkosky)
Stickybot 2 (Sb2)
started: 05 Jun 2006, MarkCutkosky Sb2 is a close sibling of StickyBot. Design modifications include:- new feet with toes that are less splayed, the better to utilize directional adhesion
- new upper limb design that is more robust and better suited for force control by monitoring compliant deflections.
- new lower limb and ankle design with less potential for cable interference
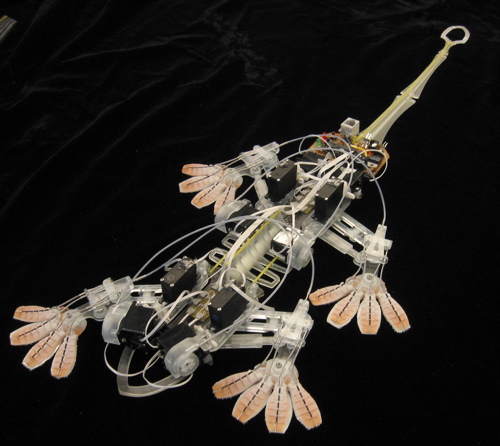
(high resolution version attached below)
Gait Development
Here are servo values which seem to give good contact for SB2's feet. They can be used directly in GPlan 6.0 (GaitPlanner? ) Alternatively, you can download this GPlan settings file to start from. These settings are for a fast trot which worked very well on glass. The generated*.DAT file is here to open with the PC ServoDriverController? and upload or emulate on SB2.
Last updated: 6/26/06
| Leg | Leg 0 | Leg 1 | Leg 2 | Leg 3 |
|---|---|---|---|---|
| Stroke | ||||
| Zero Val | 119 | 139 | 146 | 138 |
| Deg/Val | 0.5 | -0.5 | -0.5 | 0.5 |
| Wing | ||||
| Down | 112 | 164 | 181 | 78 |
| Nominal | 147 | 129 | 136 | 113 |
| Up | 172 | 112 | 100 | 139 |
| Foot | ||||
| Down | 65 | 203 | 50 | 219 |
| Up | 186 | 91 | 177 | 69 |
Ideas, requests, problems regarding TWiki? Send feedback