new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ClimbingRobotPeople > RenSummerUpdates>QuadraRiSEStickyFeet (07 Jul 2006, RenFungYu? )
Rise Web>ClimbingRobot > ClimbingRobotPeople > RenSummerUpdates>QuadraRiSEStickyFeet (07 Jul 2006, RenFungYu? )
Dry Adhesive Feet for QuadraRiSE
Active-control Actuation
Pull-pull actuation

- Mechanism allows toes to bend upwards (peeling) or downwards (pressing against surface).
- Benefits:
- Pull-pull mechanism means more flexible cables can be used. This makes it easier to route cables along feet, through ankle, etc.
- More force can be applied into actuation, as it does not depend on the stiffness of the cable - this is useful as robots increase in size, and cable stiffness cannot supply the necessary down force. Opens up possibilities for new ways of climbing (gripping with fingers?).
- Individualized actuation for each toe segment, which makes it easier to reach around obstacles/bumps.
- Only needs one servo to control.
- Things to think about
- At any point, the foot has to have a height of 2 cm or so, or else the cables will bend too much and buckle. (Perhaps this can be fixed by using a more flexible cable.)
- Toe segments have to be quite long - around 1.5 cm, for the same reason as above.
- Range of motion in either direction is somewhat limited.
- Two cable lines per foot and additional mechanisms increase overall size of toes.
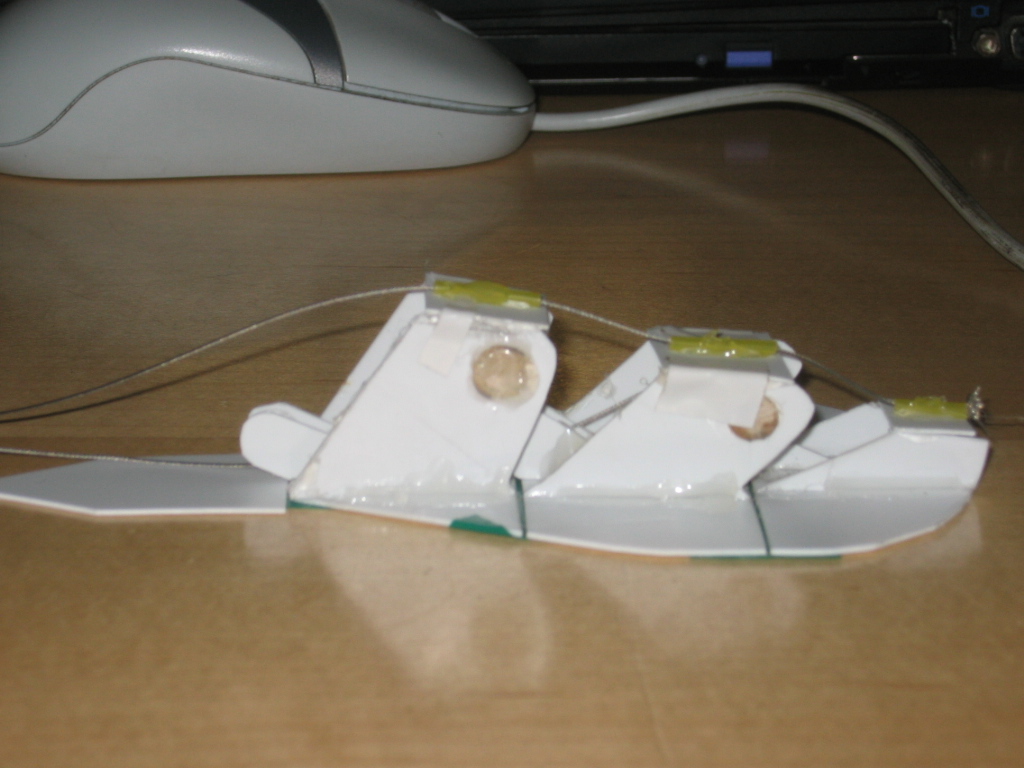
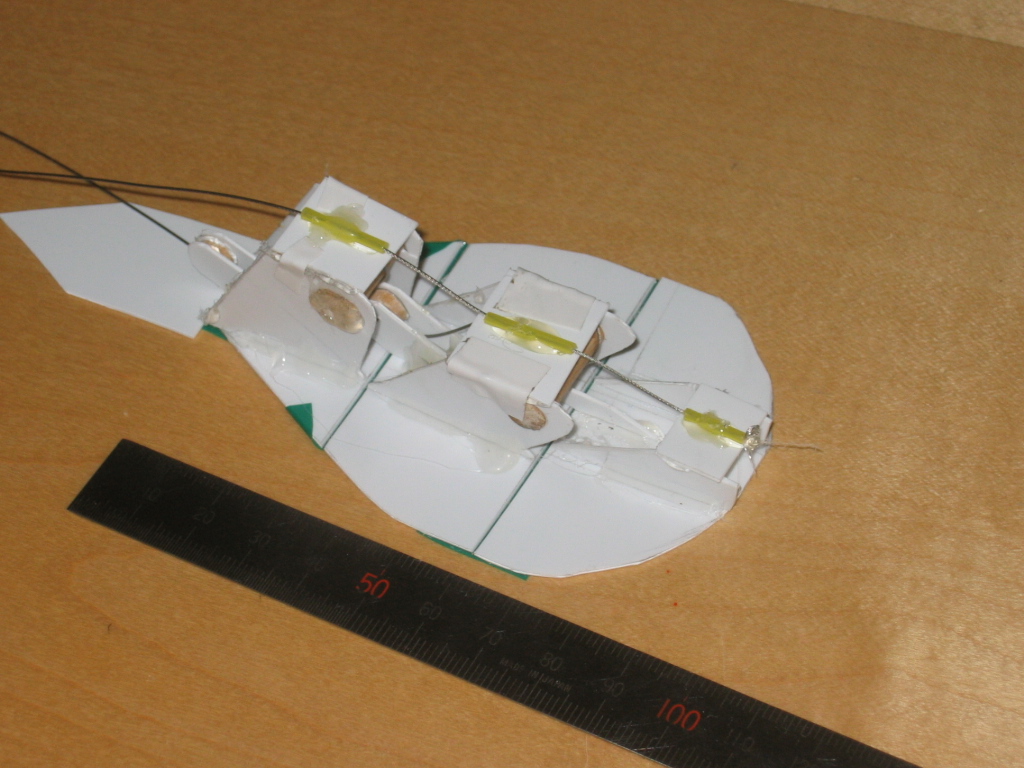
Two-degree actuation toe, version 2.

- Changes/improvements over previous design.
- Buckling tendency reduced.
- Determined minimum diameter of cable turns to be around 0.7 cm.
- Range of motion of peeling motion increased.
- To minimize the number of cable turns, number of toe segments reduced to three, from previously planned six or seven. No significant decline in performance foreseen.
- Maximum height of current design is around 2 cm.
- Length of each toe is 9 cm. Width is 6 cm. Planning for three or four toes per foot.
- Hoping for design approval and to start production stage.
- See video here.
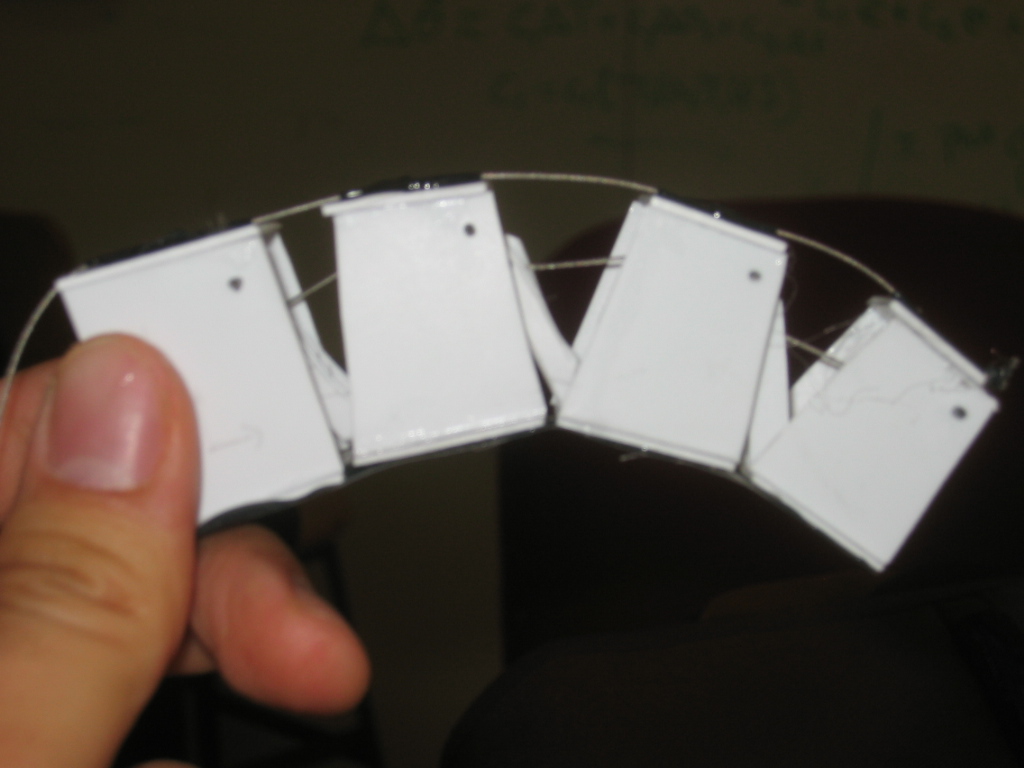
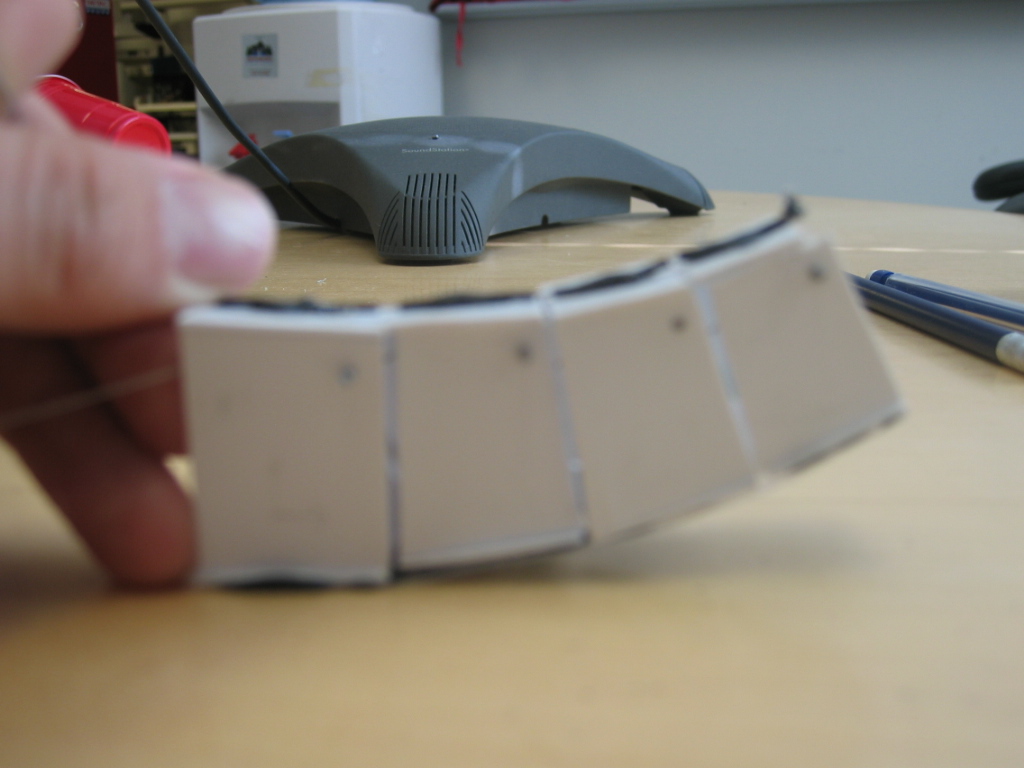
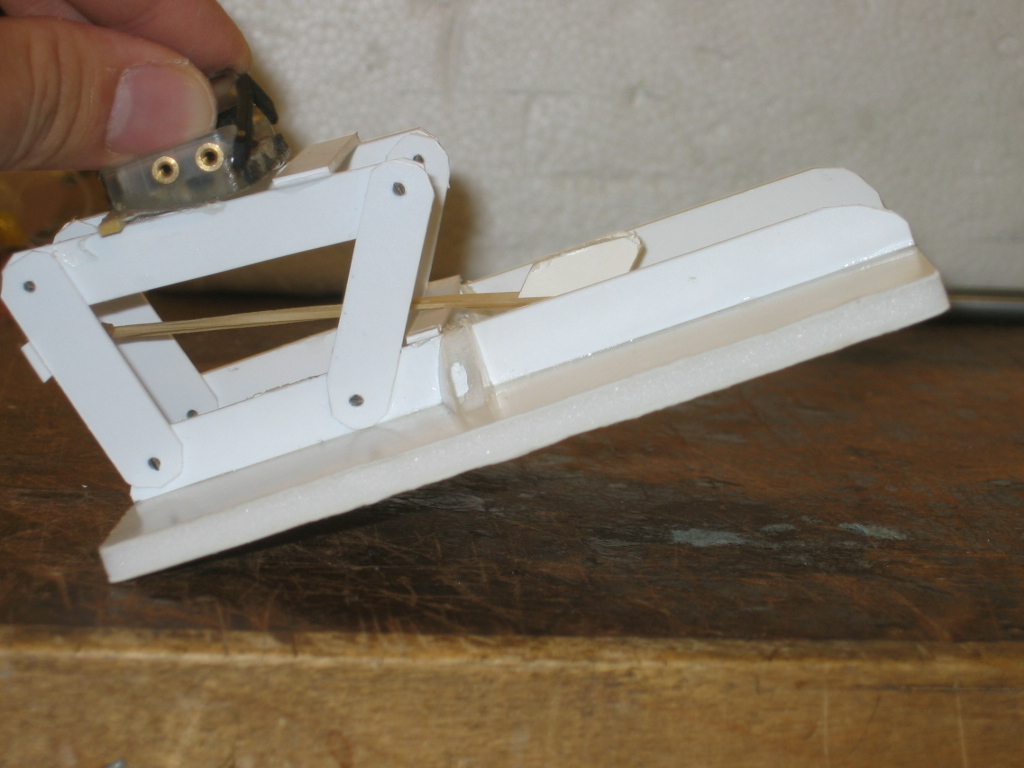
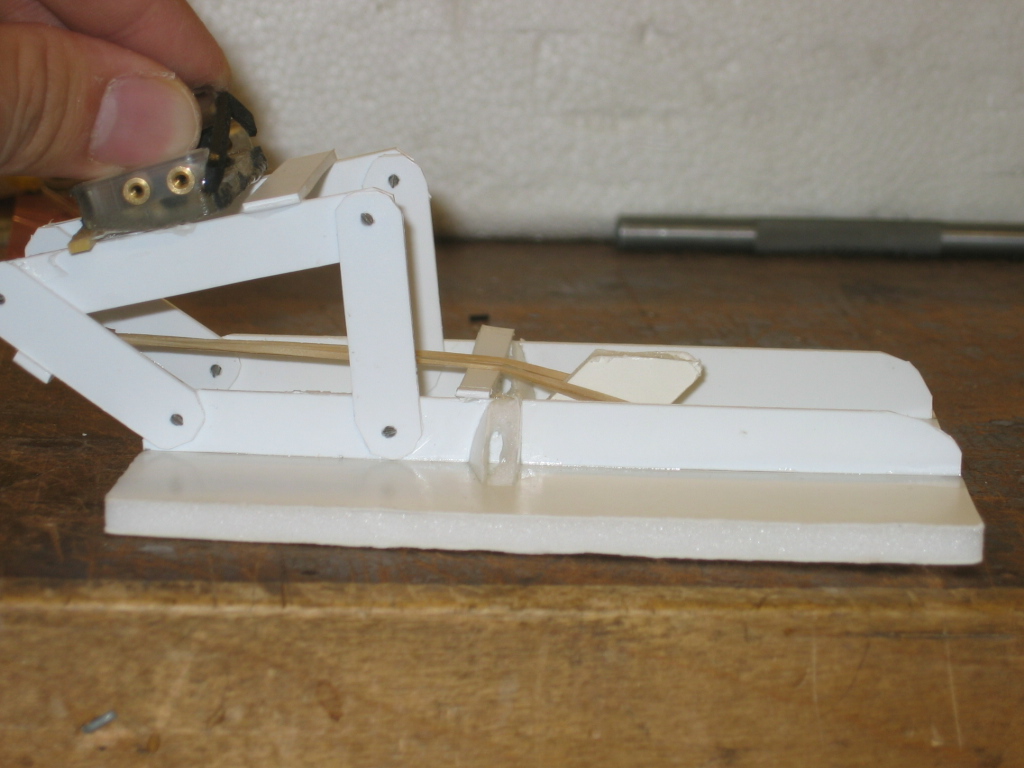
Non-rigid Frame
- Tested prototype foot using non-rigid frame. As normal and tangental (from load) forces act on the heel from the wall, the foot flexes outward, pushing it against the wall.
Non-rigid frame demonstration
 Click here for video of mechanism.
Click here for video of mechanism.
- Need to build a stronger, more rigid model for testing QuadraRiSE-scale loads (1-2 kg).
- Height of foot needs to be reduced.
- SDM more reliable elastic joints or springs.
Ideas, requests, problems regarding TWiki? Send feedback