new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>NewFootDesignsJune04? >NewFootDesignsSept04 (06 Apr 2007, MarkCutkosky)
Rise Web>NewFootDesignsJune04? >NewFootDesignsSept04 (06 Apr 2007, MarkCutkosky)
New Foot Designs starting in Sept. 04
This page is a continuation of the "advanced foot" development documented in NewFootDesignsJune04?- See FootDesign? for other foot designs.
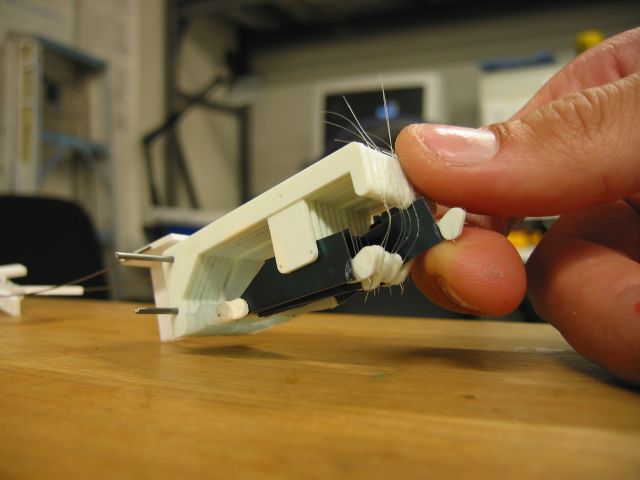
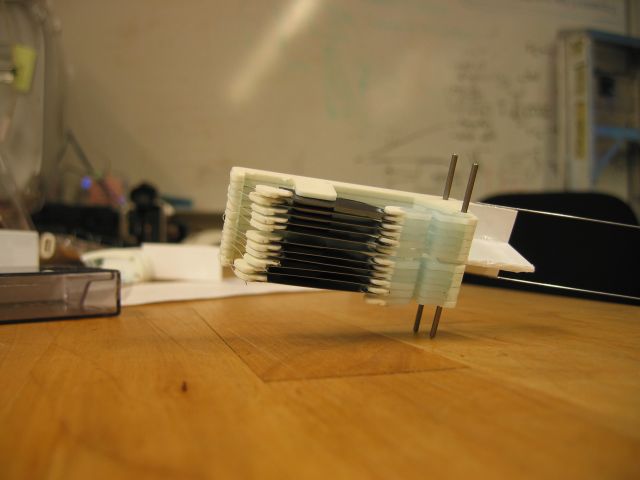
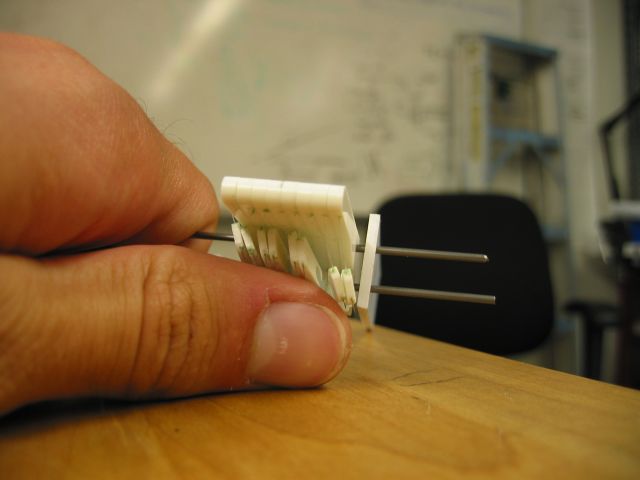
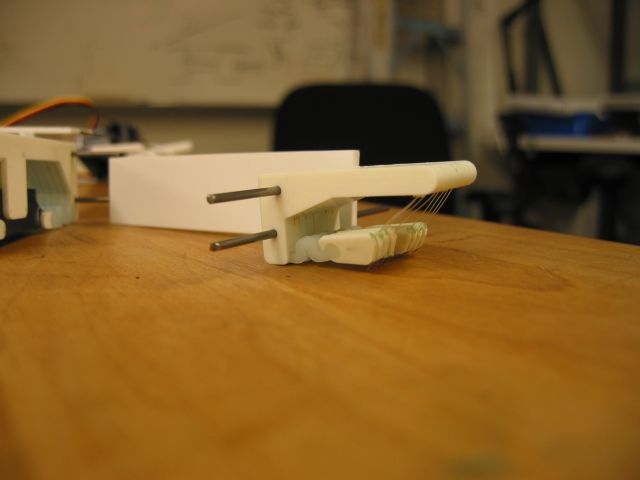
Latest advanced climbing feet, designed by Sangbae
- first SDM foot Sangbae made, with 2 spines:
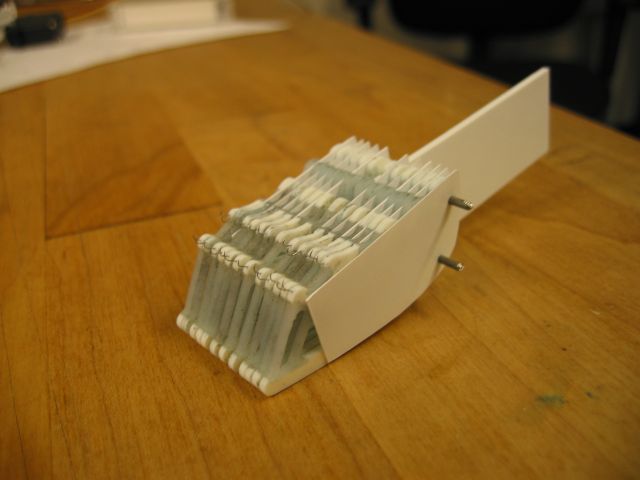

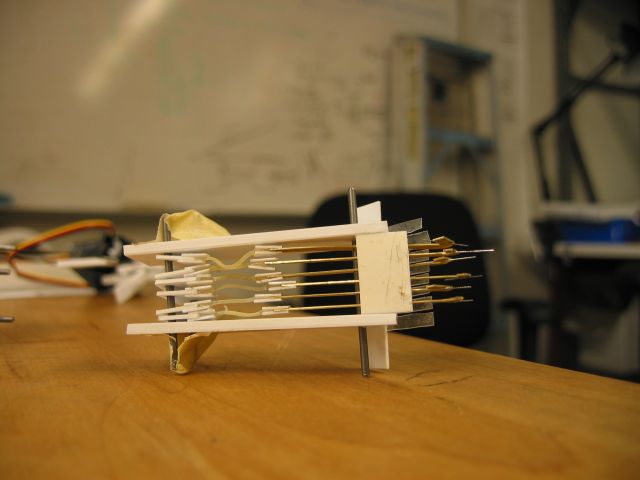
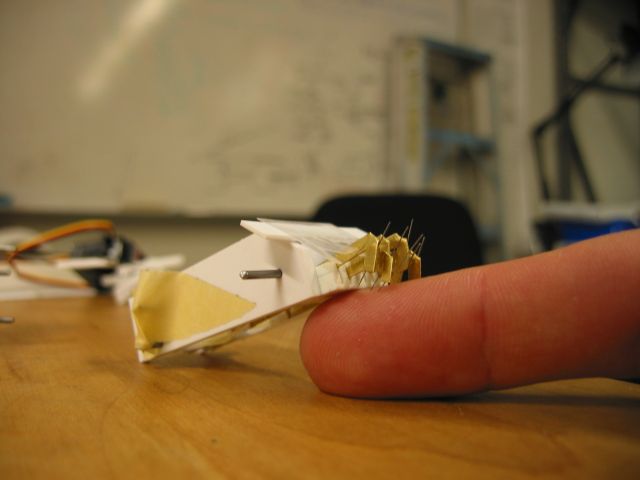
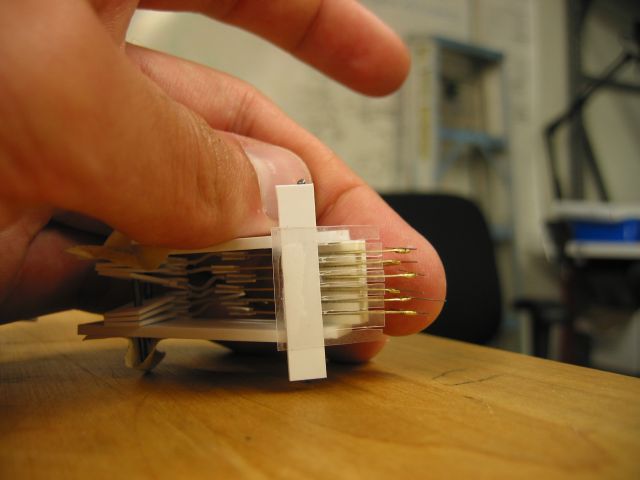
- Showing how batches of the toes are made. This is the second version of the foot:

Advanced climbing feet by Alan:
- Alanv3:
- First SDM foot that Alan made:
- v2 = foot with rubber bands and brass:
Presentation by Alan about climbing foot design
- DesignofCompliantClimbingFeet.ppt: Presentation in Group Meeting 9/14/04
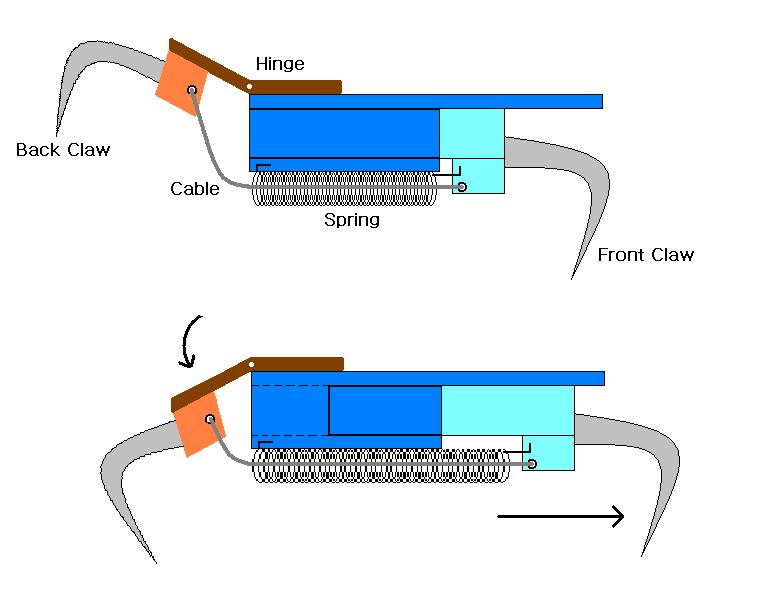
Grabbing foot design idea using a back claw
-- YongLaePark - 31 Aug 2004- Current foot designs for both ToyBot and RiSEbot have only front claws which allow the robot only to hang on the wall, so the foot itself cannot grab or hold the wall independently.
- However, it is necessary for the robot to have grabbing motion for more stable climbing.
- A few simple constraints were considered while designing a grabbing back claw.
- Back claw should not obstruct the movement of the foot when the foot is not engaged on the wall.
- Back claw should be easily retractable when the foot disengages.
- Back claw should be actuated only after the front claw catches the wall.
- Additional actuator to move the back claw should be avoided.
- Foot design:
- Prototypes:

- Video clip (how it works):
Ideas, requests, problems regarding TWiki? Send feedback