new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ClimbingConcepts > ClawConcepts>ArtificialTarsi (23 Jul 2003, MarkCutkosky)
Rise Web>ClimbingRobot > ClimbingConcepts > ClawConcepts>ArtificialTarsi (23 Jul 2003, MarkCutkosky)
-- ShaiRevzen? - 20 Jul 2003
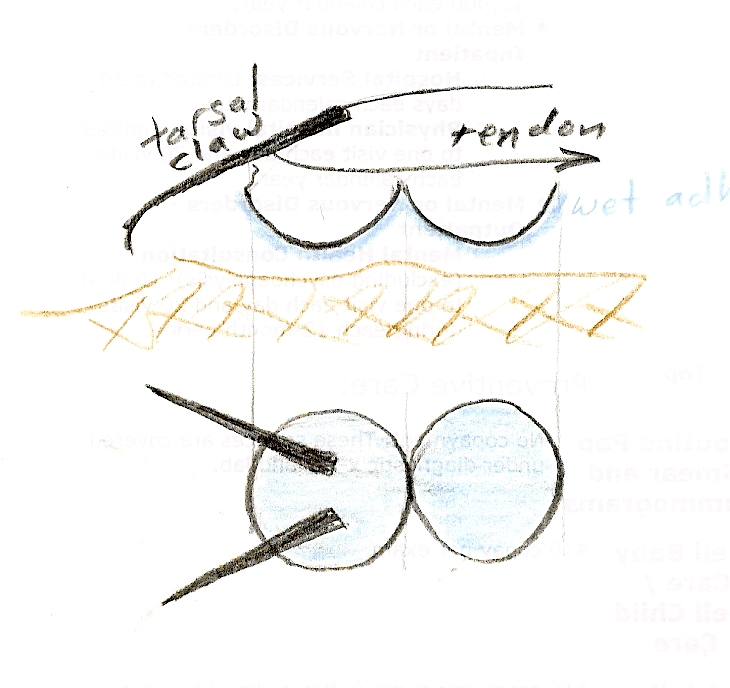
I promised these sketches to Jonathan a while ago. I try to illustrate an interesting point in the way roach tarsi work: 
- The sticky pads interact with the surface to create a little adhesion
- The tendon in the middle of the tarsus pulls the tarsal claws down
- The claws stick into the surface in a "near optimal" (more thoughts on that in ClawMechanics) angle
- claw1.jpg:
Ideas, requests, problems regarding TWiki? Send feedback