new web: http://bdml.stanford.edu/pmwiki
TWiki > Haptics Web>StanfordHaptics>HapticsPictures (17 Jan 2008, MarkCutkosky)
Haptics Web>StanfordHaptics>HapticsPictures (17 Jan 2008, MarkCutkosky)
Haptics Pictures
A collection of recent haptics research images from Cutkosky haptics lab at Stanford University.
| The images at right show an exoskeletal device designed and prototyped by Ph.D. student Li Jiang. It is intended to aid stroke victims. It allows the unimpaired hand to provide a force that uncurls the fingers of the impaired hand so that the hands can be used together in tasks like carrying a tray. Force sensors on the fingertips measure the grasp forces. Vibration feedback is applied to the unimpaired hand, and eventually to the impaired hand as well, to help in the rehabilitation process. |
 Download 688 K Version of image |
 |
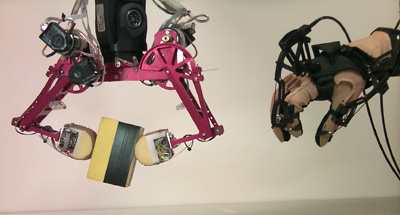
| The image at right is from a recent project (Griffin, Provancher and Cutkosky 2006) on dexterous telemanipulation with haptic feedback. The instrumented glove and exoskeleton are being used to supervise the control of the robot hand. Forces sensed at the robot hand are relayed back to the human operator. |
 Zipped archive Robot and Cybergrasp pics (16MB): |
|
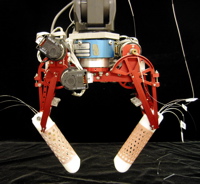
| The image at right shows two hollow, exoskeletal robot fingers created using a multi-material rapid-prototyping process Park 2007. The fingers are light but robust, and suitable for use in space robots. The fingers have embedded optical fibers with Bragg gratings that serve as strain gages for detecting contact forces and locations. The optical sensors can measure 0.1 microstrain and are immune to electromagnetic interference. |
 optical fiber fingers (1 MB) |
 detail of finger (644K) |
Ideas, requests, problems regarding TWiki? Send feedback